一种管道巡检的模块化防卡死防滑机器人的制作方法
本发明属于管道应用,具体涉及一种管道巡检的模块化防卡死防滑机器人。
背景技术:
1、随着城市电网入地工程持续的增长,电力电缆线路也随着大幅度的增加,尤其是局部支线需要穿线的预埋钢管(或者pvc管),这就给电缆运行维护单位提出了难题。同时信息技术和人工智能的发展,机器人技术的进步与发展越来越迅速。在各种机器人中,工业机器人应用较早,发展也较为成熟,且在汽车制造等行业得到广泛的应用。而在电力行业,一些工作在实施的过程中,人工的效率比较低下,重复性高且较为繁琐,另一些工作则因为环境恶劣、危险,容易对人身造成伤害。
2、而上述的巡检难题,就迫切需要通过巡检机器人研发来解决这些问题。当前,传统的巡检机器人,在使用的过程出现的普遍现象是:(1)在管道内壁打滑,影响巡检效率;(2)易出现卡死,导致不能及时回收;(3)也不便后期维护和升级更换组件;(4)照明效果不理想,也影响巡检效果。
3、因此,基于上述问题,本发明提供一种管道巡检的模块化防卡死防滑机器人。
技术实现思路
1、发明目的:本发明的目的是提供一种管道巡检的模块化防卡死防滑机器人,解决长距离城市管道的巡检机器人使用时所存在的问题,提高巡检效率及巡检机器人的适用性。
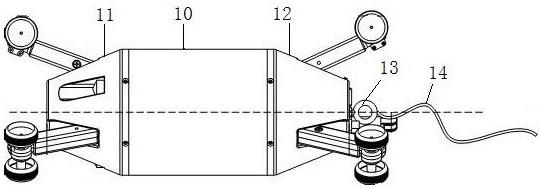
2、技术方案:本发明提供的一种管道巡检的模块化防卡死防滑机器人,包括机器人中间壳体、前带行走臂滚轮安装槽壳体、后带行走臂滚轮安装槽壳体、牵引绳卡环、牵引绳、三个前带行走臂滚轮、三个后带行走臂滚轮和蓄电模块,所述机器人中间壳体内设置有第一限位部、第二限位部,所述第一限位部、第二限位部的一面分别设置有第一过渡部、第二过渡部,所述第一过渡部、第二过渡部的一面分别设置有第一回转机构安装部、第二回转机构安装部,所述第一回转机构安装部、第二回转机构安装部上分别设置有第一回转机构、第二回转机构,所述第一回转机构、第二回转机构上分别设置有三个第一带回转机构安装部、三个第二回转机构安装部,所述三个第一带回转机构安装部、三个第二回转机构安装部上分别设置有与三个前带行走臂滚轮、三个后带行走臂滚轮相配合使用的前带行走臂滚轮安装簧、后带行走臂滚轮安装簧;所述三个前带行走臂滚轮、三个后带行走臂滚轮上分别设置有缓冲复位部件;其中,缓冲复位部件用于对穿障碍物时收缩的三个前带行走臂滚轮、三个后带行走臂滚轮快速复位和保护。
3、本技术方案,所述管道巡检的模块化防卡死防滑机器人,还包括将第一限位部、第一过渡部固定装配的l形固定板、第一固定螺栓、第二固定螺栓,及将第二过渡部固定在后带行走臂滚轮安装槽壳体内壁的第三固定螺栓。
4、本技术方案,所述管道巡检的模块化防卡死防滑机器人,还包括设置在第一回转机构安装部一面的摄像头安装部,及设置在摄像头安装部一面的摄像头。
5、本技术方案,所述管道巡检的模块化防卡死防滑机器人,还包括分别设置在三个前带行走臂滚轮、三个后带行走臂滚轮外壁的前带防滑凸起橡胶套、后带防滑凸起橡胶套。
6、本技术方案,所述管道巡检的模块化防卡死防滑机器人,还包括设置在机器人中间壳体、前带行走臂滚轮安装槽壳体连接面,且位于第一过渡部外层的三个带导线镭射灯。
7、本技术方案,所述第一限位部、第二限位部分别设置为圆形中空板式结构,第一过渡部、第一回转机构安装部分别设置为圆柱形结构,第二过渡部、第二回转机构安装部分别设置为圆柱形结构,第一过渡部的直径尺寸大于第一回转机构安装部的直径尺寸,第二过渡部的直径尺寸小于第二回转机构安装部的直径尺寸。
8、本技术方案,所述第一回转机构包括设置在机器人中间壳体一端内的第一收缩驱动电机,及与第一收缩驱动电机连接的第一联轴器,及与第一联轴器连接的第一内螺纹套,及一端设置在第一内螺纹套内的第一外螺纹驱动杆,及设置在第一外螺纹驱动杆一端的第一带螺孔过渡板,及分别与第一带螺孔过渡板外层固定连接的第一水平向驱动杆,及分别设置在前带行走臂滚轮一端外壁的前带行走臂滚轮连接部,及两端分别与第一水平向驱动杆、前带行走臂滚轮连接部连接的第一活动连接部;所述第二回转机构包括设置在机器人中间壳体另一端内的第二收缩驱动电机,及与第二收缩驱动电机连接的第二联轴器,及与第二联轴器连接的第二内螺纹套,及一端设置在第二内螺纹套内的第二外螺纹驱动杆,及设置在第二外螺纹驱动杆一端的第二带螺孔过渡板,及分别与第二带螺孔过渡板外层固定连接的第二水平向驱动杆,及分别设置在后带行走臂滚轮一端外壁的后带行走臂滚轮连接部,及两端分别与第二水平向驱动杆、后带行走臂滚轮连接部连接的第二活动连接部。
9、本技术方案,所述第一回转机构还包括设置在前带行走臂滚轮安装槽壳体内壁,且与第一水平向驱动杆相配合使用的前带孔限位板;所述第二回转机构还包括设置在后带行走臂滚轮安装槽壳体内壁,且与第二水平向驱动杆相配合使用的前带孔限位板。
10、本技术方案,所述缓冲复位部件包括设置在机器人中间壳体外壁的外螺纹调节套,及分别通过一组内螺纹调节部安装在外螺纹调节套上的内螺纹限位部,及分别设置在内螺纹限位部外层的三组带孔耳板,及分别设置在带孔耳板内的过渡支撑板,及分别设置在过渡支撑板一端内的过渡支撑板通孔,及通过过渡支撑板通孔、带孔耳板将内螺纹限位部、过渡支撑板固定装配的固定螺杆、固定螺杆螺母,及分别设置在过渡支撑板另一端的水平向支撑螺杆,及分别设置在水平向支撑螺杆一端的过渡内螺纹连接部,及分别设置在平向支撑螺杆一端,且与过渡内螺纹连接部相配合使用的平向支撑螺杆螺母,及分别设置在平向支撑螺杆一端端面的缓冲限位部,及分别设置在缓冲限位部外层内的缓冲限位部卡槽,及分别设置在三个前带行走臂滚轮、三个后带行走臂滚轮内壁的固定限位部,及分别设置在固定限位部一面内的固定限位部卡槽,及分别通过缓冲限位部卡槽、固定限位部卡槽两端固定安装在缓冲限位部、固定限位部内的弹簧。
11、本技术方案,所述管道巡检的模块化防卡死防滑机器人,还包括分别设置在三个前带行走臂滚轮、三个后带行走臂滚轮外壁的圆形敞开式限位部,及分别对称设置在圆形敞开式限位部上部内的圆形敞开式限位部通槽,及分别设置在圆形敞开式限位部内的竖外螺纹支撑杆,及分别设置在竖外螺纹支撑杆一端内的若干个竖外螺纹支撑杆通槽,及分别通过圆形敞开式限位部通槽、竖外螺纹支撑杆通槽将圆形敞开式限位部、竖外螺纹支撑杆固定装配的辅助横螺杆、辅助横螺杆螺母,及分别设置在竖外螺纹支撑杆另一端的圆形连接座,及分别设置在圆形连接座一面,且与竖外螺纹支撑杆连接的圆形连接座螺槽,及分别设置在圆形连接座一面的刮板支撑部,及分别设置在刮板支撑部一端端面的刮板。
12、与现有技术相比,本发明的一种管道巡检的模块化防卡死防滑机器人的有益效果在于:1、轮胎防滑,增加的前带防滑凸起橡胶套、后带防滑凸起橡胶套,在光滑或者有油污等特殊环境下,管道内摩擦力较弱时,前带防滑凸起橡胶套、后带防滑凸起橡胶套的表面分别均布防滑凹凸尖刺,可顺利附着在管壁内腔,增加摩擦力,使得机器运行更加平稳可靠;2、整体结构设计,采用模块化设计及安装方式,可快速进行组装和连接,后期维护和升级更换组件过程成也更加便捷方便;3、防卡死及回收,机器人在运行过程中,如异常卡死,无法前进或后退,机器人自主实现报警,可手动遥控控制三个前带行走臂滚轮和第一回转机构运转,三个后带行走臂滚轮和第二回转机构运转,这时三个前带行走臂滚轮、三个后带行走臂滚轮折叠缩回,缩回后分别在前带行走臂滚轮安装簧、后带行走臂滚轮安装簧的作用下可再次展开运行,或者使用机器人尾部的牵引绳装置拉回机器人,实现机器人自主防卡死利于回收及自保功能;4、整体结构机器人在管道内运行,多组镭射灯环绕分布在前带行走臂滚轮安装槽壳体,可供机器人摄像头照明拍照等使用;5、增加的缓冲复位部件,能对穿障碍物时收缩的三个前带行走臂滚轮、三个后带行走臂滚轮快速复位和保护,延长其使用寿命;6、增加的刮板可刮除管道内壁的侵入附着物,便于通过外部设备进行清除如气力吹或水冲等,相配合圆形敞开式限位部、圆形敞开式限位部通槽、竖外螺纹支撑杆、若干个竖外螺纹支撑杆通槽、辅助横螺杆和辅助横螺杆螺母,可实现其便捷的组装以及进行适应性的垂直向装配调整。
- 还没有人留言评论。精彩留言会获得点赞!