一种基于人工智能的安全监控设备及其调节方法
本发明涉及监控,具体为一种基于人工智能的安全监控设备及其调节方法。
背景技术:
1、人工智能从诞生以来,理论和技术日益成熟,应用领域也不断扩大,可以设想,未来人工智能带来的科技产品,将会是人类智慧的“容器”,监控摄像头是一种半导体成像器件,具有灵敏度高、抗强光、畸变小、体积小、寿命长、抗震动等优点,监控摄像机安全防范系统中。图像的生成当前主要是来自ccd摄像机,也可将存储的电荷取出使电压发生变化,具有抗震动和撞击之特性而被广泛应用,人工智能在监控设备在对走廊、室内、车间等进行监控,主要对进出入人员进行识别。
2、摄像头在安装时,通常将安装板固定在墙体的表面,通过支撑架对摄像头进行支撑,实现对摄像头的安装,在安装时难免会产生高度偏差,导致摄像头的高度偏低或偏高,导致摄像头的监视范围发生偏移,摄像头的水平转动角度,通常通过螺栓等,对摄像头水平转动角度进行调节,当需要摄像头的监视范围进行改变时,需要使用者将螺栓拆除改变,增加了摄像头转动角度改变的时间,降低了工作效率,摄像头竖直转动角度改变,通常在转动槽块的表面开设有连接孔,通过螺栓与螺帽的配合,对摄像头进行支撑,实现对摄像头竖直转动角度的改变,长时间的支撑,难免会导致螺栓产生形变,导致摄像头的监视范围发生变化,导致监视范围的精确度降低,支撑架的长度往往是固定的,当摄像头的摄像范围广时,因摄像头与墙体的距离过近,难免会造成摄像头的监视范围减少,增加摄像头的盲区。
技术实现思路
1、本发明的目的在于提供一种基于人工智能的安全监控设备及其调节方法,以解决上述背景技术中提出的问题。
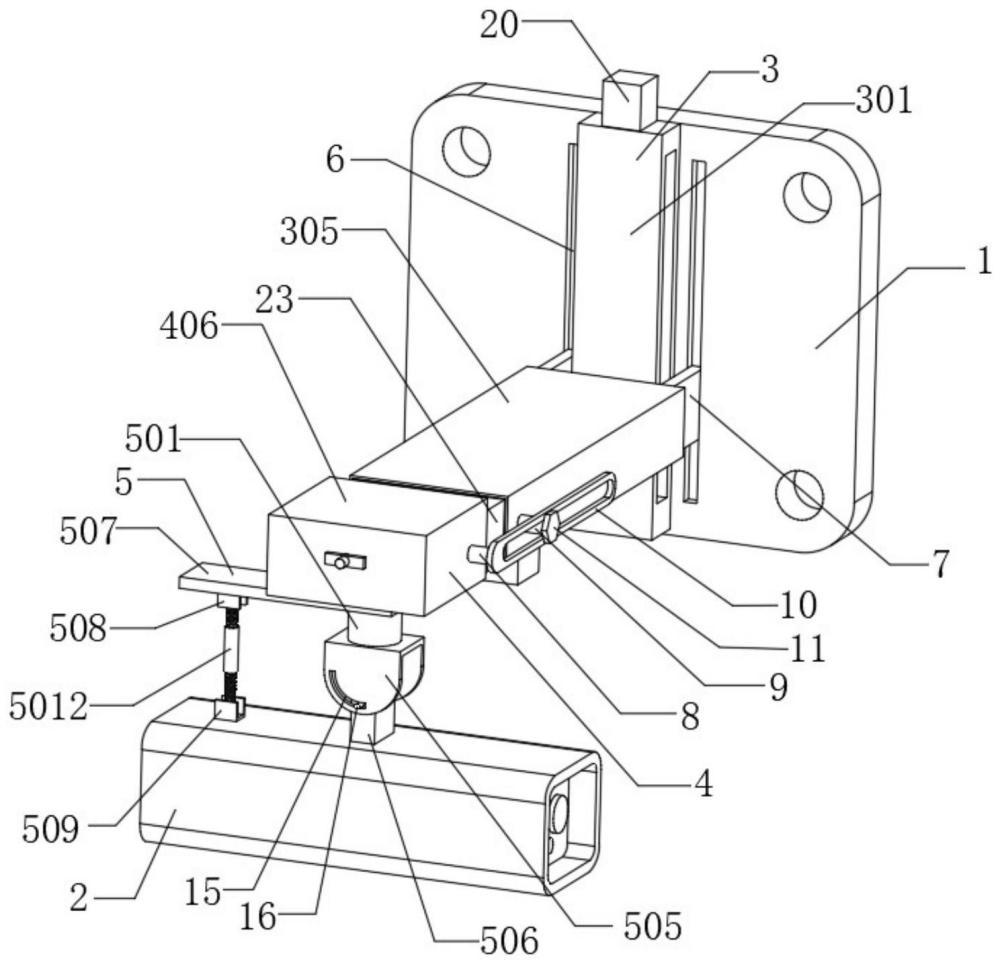
2、为了解决上述技术问题,本发明提供如下技术方案:一种基于人工智能的安全监控设备,包括安装板与摄像头,所述安装板的表面设置有调节机构;所述调节机构的内壁设置有延伸机构;所述延伸机构的顶部设置有转动机构;
3、所述调节机构包括连接块,所述连接块固定安装于支撑板的一侧,所述连接块的顶部固定安装有第一电机,所述第一电机的输出端固定安装有调节杆,所述调节杆的一端贯穿至连接块的内壁,所述调节杆的表面设置有转轴,所述调节杆的表面与连接块的内壁通过转轴转动连接,所述调节杆的表面螺纹连接有支撑块;
4、所述延伸机构包括连接槽,所述连接槽开设于支撑块的表面,所述连接槽的内腔滑动连接有齿板,所述支撑块的底部固定安装有第二电机,所述第二电机的输出端固定安装有转动杆,所述转动杆的一端贯穿至连接槽的内腔,所述转动杆的一端固定安装有第一齿轮,所述第一齿轮的齿牙与齿板的齿牙相互啮合,所述齿板的一侧固定安装有放置块;
5、所述转动机构包括转动柱,所转动柱转动连接于放置块的内壁,所述转动柱的一端贯穿至放置块的内腔,所述转动住的表面固定安装有第二齿轮,所述放置块的内壁滑动连接有挤压杆,所述挤压杆的一端固定安装有限位块,所述限位块的表面与第二齿轮的表面相接触,所述转动柱的底部固定安装有转动槽块,所述转动槽块的内壁转动连接有连接杆,所述连接杆的一端与摄像头的表面固定连接,所述转动柱的表面固定安装有支撑板,所述支撑板的底部固定安装有第一支撑槽块,所述摄像头的底部固定安装有第二支撑槽块,所述第一支撑槽块的内壁转动连接有第一支撑杆,所述第二支撑槽块的内壁转动连接有第二支撑杆,所述第一支撑杆表面螺纹连接有螺纹套,所述第二支撑杆的表面与螺纹套的内腔螺纹连接。
6、优选的,所述安装板的一侧开设有移动槽,所述支撑块的表面固定安装有移动块,所述移动块的表面与移动槽的内腔滑动连接。
7、优选的,所述支撑块的内壁固定安装有伸缩板,所述伸缩板的表面与放置块的另一侧固定连接,所述伸缩板的表面开设有滑动槽,所述滑动槽的内腔与转动杆的表面活动连接。
8、优选的,所述放置块的表面固定安装有第一连接柱,所述支撑块的表面固定安装有第二连接柱,所述第一连接柱的表面固定安装有连接板,所述连接板的内腔与第二连接柱的表面滑动连接,所述第二连接柱的内壁螺纹连接有定位杆,所述定位杆的表面与连接板的表面紧密接触。
9、优选的,所述放置块的一侧开设有固定槽,所述固定槽的内壁固定安装有弹簧,所述挤压杆的表面固定安装有固定板,所述弹簧的一端固定安装于固定板的表面。
10、优选的,所述转动槽块的表面开设有弧形孔,所述连接杆的表面固定安装有延伸块,所述延伸块的表面与弧形孔的内腔滑动连接。
11、优选的,所述第一支撑杆与第二支撑杆的表面均固定安装有挡块,所述挡块的表面与螺纹套的内壁相接触。
12、优选的,所述连接槽的内壁开设有导向槽,所述齿板的底部固定安装有导向块,所述导向槽的内腔与导向块的表面滑动连接。
13、优选的,所述支撑块的底部与连接块的顶部均固定安装有防护盒,所述第一电机与第二电机的表面均固定安装于防护盒的内腔。
14、优选的,所述导向槽的内壁开设有延伸槽,所述导向块的底部固定安装有延伸板,所述延伸板的表面与延伸槽的内壁相接触。
15、一种基于人工智能的安全监控设备的调节方法,包括如下步骤:
16、步骤s1:将安装板固定安装于墙体的表面,对摄像头的高度进行初步固定,通过外接电源对第一电机进行供电,通过调节杆转动带动支撑块的高度,实现对摄像头的高度进行精确调节;
17、s2:通过外接电源对第二电机进行供电,使第一齿轮进行转动,能够带动齿板在连接槽的内腔进行水平移动,能够精确调节摄像头与墙体之间的距离;
18、s3:通过转动杆在放置块内壁的转动,能够改变摄像头水平转动角度精确调节,通过螺纹套带动第一支撑杆与第二支撑杆的移动,改变摄像头竖直转动角度,实现对摄像头竖直角度的改变,完成对摄像头检测位置的调节。
19、与现有技术相比,本发明所达到的有益效果是:
20、本发明通过设置调节机构、延伸机构与转动机构,能够通过第一电机带动调节杆进行转动,实现对摄像头高度的精确调节,通过第二电机带动第一齿轮转动,因第一齿轮与齿板的啮合,能够改变摄像头与墙体之间的距离,通过转动柱在放置块内壁的转动,通过限位块与第二齿轮的接触,实现对摄像头的水平转动角度的精确调节,通过螺纹套带动第一支撑杆与第二支撑杆的移动,实现对摄像头的竖直转动角度角度的调节,能够使摄像头的摄像范围更加精确,减少监视盲区。
技术特征:
1.一种基于人工智能的安全监控设备,包括安装板(1)与摄像头(2),其特征在于:所述安装板(1)的表面设置有调节机构(3);所述调节机构(3)的内壁设置有延伸机构(4);所述延伸机构(4)的顶部设置有转动机构(5);
2.根据权利要求1所述的一种基于人工智能的安全监控设备,其特征在于:所述安装板(1)的一侧开设有移动槽(6),所述支撑块(305)的表面固定安装有移动块(7),所述移动块(7)的表面与移动槽(6)的内腔滑动连接。
3.根据权利要求1所述的一种基于人工智能的安全监控设备,其特征在于:所述支撑块(305)的内壁固定安装有伸缩板(23),所述伸缩板(23)的表面与放置块(406)的另一侧固定连接,所述伸缩板(23)的表面开设有滑动槽(24),所述滑动槽(24)的内腔与转动杆(404)的表面活动连接;
4.根据权利要求1所述的一种基于人工智能的安全监控设备,其特征在于:所述放置块(406)的表面固定安装有第一连接柱(8),所述支撑块(305)的表面固定安装有第二连接柱(9),所述第一连接柱(8)的表面固定安装有连接板(10),所述连接板(10)的内腔与第二连接柱(9)的表面滑动连接,所述第二连接柱(9)的内壁螺纹连接有定位杆(11),所述定位杆(11)的表面与连接板(10)的表面紧密接触。
5.根据权利要求1所述的一种基于人工智能的安全监控设备,其特征在于:所述放置块(406)的一侧开设有固定槽(12),所述固定槽(12)的内壁固定安装有弹簧(13),所述挤压杆(503)的表面固定安装有固定板(14),所述弹簧(13)的一端固定安装于固定板(14)的表面。
6.根据权利要求1所述的一种基于人工智能的安全监控设备,其特征在于:所述转动槽块(505)的表面开设有弧形孔(15),所述连接杆(506)的表面固定安装有延伸块(16),所述延伸块(16)的表面与弧形孔(15)的内腔滑动连接。
7.根据权利要求1所述的一种基于人工智能的安全监控设备,其特征在于:所述第一支撑杆(5010)与第二支撑杆(5011)的表面均固定安装有挡块(17),所述挡块(17)的表面与螺纹套(5012)的内壁相接触。
8.根据权利要求1所述的一种基于人工智能的安全监控设备,其特征在于:所述连接槽(401)的内壁开设有导向槽(18),所述齿板(402)的底部固定安装有导向块(19),所述导向槽(18)的内腔与导向块(19)的表面滑动连接。
9.根据权利要求8所述的一种基于人工智能的安全监控设备,其特征在于:所述导向槽(18)的内壁开设有延伸槽(21),所述导向块(19)的底部固定安装有延伸板(22),所述延伸板(22)的表面与延伸槽(21)的内壁相接触。
10.基于权利要求1-9任一项所述的安全监控设备的调节方法,其特征在于包括如下步骤:
技术总结
一种基于人工智能的安全监控设备及其调节方法,涉及监控技术领域,包括安装板与摄像头,所述安装板的表面设置有调节机构;所述调节机构的内壁设置有延伸机构;所述延伸机构的顶部设置有转动机构。该基于人工智能的安全监控设备及监控方法,设置调节机构、延伸机构与转动机构,能够通过第一电机带动调节杆进行转动,实现对摄像头高度的精确调节,通过第二电机带动第一齿轮转动,能够改变摄像头与墙体之间的距离,通过转动柱在放置块内壁的转动,实现对摄像头的水平转动角度的精确调节,通过螺纹套带动第一支撑杆与第二支撑杆的移动,实现对摄像头的竖直转动角度角度的调节,能够使摄像头的摄像范围更加精确。
技术研发人员:褚洪彦,卜元卿,吴华
受保护的技术使用者:南京信息职业技术学院
技术研发日:
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!