一种热网井室开阀机器人
本发明涉及一种开阀机器人,具体涉及一种热网井室开阀机器人。
背景技术:
1、井室是地下管道连接点的一个容纳空间,内部有管道连接点、阀门开关等内容,井盖直径1米,井口直径0.7米,井口向下有梯子供人员下井,热网的井室有两条管道通过,每个井室设置有两个井口,每个井口对应一条管道,每条管道有一套阀门部件,有的阀门手柄在管道上方,有的阀门手柄在管道的侧面。
2、井室阀门是控制地下管道的重要部件。每年都需要打开或关闭阀门多次。阀门手柄旋转扭矩大,每次旋转需要20转以上。热网的井室蒸汽多,温度高,甚至含有有害气体,对操作者下井作业都带来不小的困扰。井口小,直径0.7米,梯子还要占据一些空间,普通的机器人难以进入井下。管道距离地面远,普通的机械手臂难以发挥作用。井室底部辅助管道复杂,井底环境差,常伴有积水、淤泥及砖头等,不利于机器人井底作业。因此目前阀门的开启与关闭一直是由人工来完成,操作者或徒手,或带辅助工具下井开关阀门。井下环境恶劣,温度高,有蒸汽,甚至含有有害气体,不利于操作者下井作业。阀门扭矩大,旋转转数多,对操作者的体力消耗大。井室数量大,加大了操作者的劳动强度。
技术实现思路
1、本发明为了解决现有井室阀门的开关需要人工完成,作业环境差,劳动强度高,存在安全威胁的问题,进而提出一种热网井室开阀机器人。
2、本发明为解决上述技术问题采取的技术方案是:
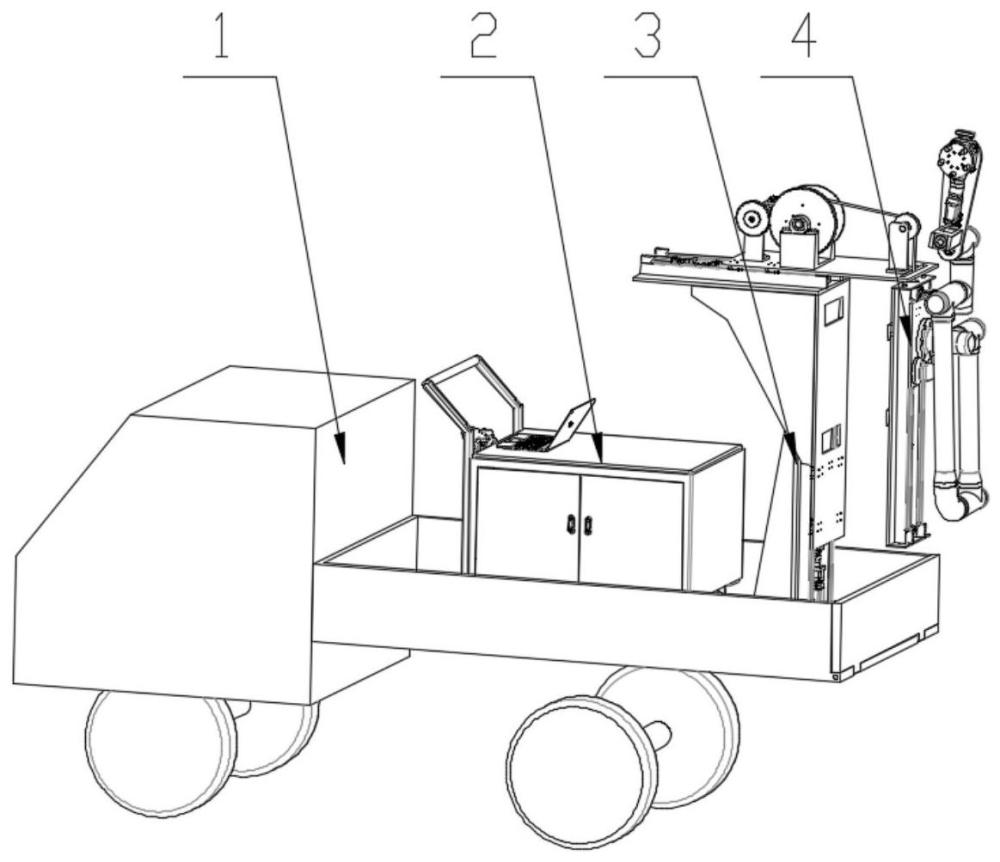
3、一种热网井室开阀机器人包括移动车、电控小车、提升机构和下井机构,电控小车和提升机构设置在移动车上,下井机构与提升机构连接,且下井机构通过提升机构分别沿竖直方向和水平方向移动,下井机构的执行端具有六个移动自由度。
4、进一步地,所述提升机构包括提升座组件、提升架组件和平移板组件,提升座组件竖直设置,提升架组件与提升座组件沿竖直方向滑动连接,平移板组件与提升架组件沿水平方向滑动连接。
5、进一步地,所述提升座组件包括提升座、提升座减速电机、提升座减速电机支架、提升座丝杠螺母固定架、提升座丝杠螺母、提升座滚珠丝杠、提升座丝杠轴承座、两个提升座直线滑轨和两组提升座滑块,提升座竖直固接在移动车的上端面上,两个提升座直线滑轨并列固接在提升座的前端面上,每个提升座直线滑轨分别沿竖直方向设置,提升座滚珠丝杠平行设置在两个提升座直线滑轨之间,提升座滚珠丝杠的端部通过提升座丝杠轴承座与提升座的前端面转动连接,提升座减速电机通过提升座减速电机支架固接在提升座的前端面上,提升座减速电机的输出轴与提升座滚珠丝杠的一端连接,提升座丝杠螺母与提升座滚珠丝杠螺纹连接,提升座丝杠螺母固定架固接在提升座丝杠螺母的外侧,每个提升座直线滑轨上分别卡装有一组提升座滑块,提升座滑块与提升座直线滑轨滑动连接。
6、进一步地,所述提升架组件包括提升架、提升架丝杠螺母、提升架丝杠螺母固定架、提升架滚珠丝杠、提升架丝杠轴承座、提升架减速电机支架、提升架减速电机、两个提升架直线滑轨和两组提升架滑块,提升架的形状为l形,提升架的竖直段固接在提升座滑块和提升座丝杠螺母固定架的外侧端面上,提升架的水平段设置在提升座的上部,两个提升架直线滑轨并列固接在提升架水平段的上端面上,每个提升架直线滑轨分别沿水平方向设置,提升架滚珠丝杠平行设置在两个提升架直线滑轨之间,提升架滚珠丝杠的端部通过提升架丝杠轴承座与提升架水平段的上端面转动连接,提升架减速电机通过提升架减速电机支架固接在提升架水平段的上端面上,提升架减速电机的输出轴与提升架滚珠丝杠的一端连接,提升架丝杠螺母与提升架滚珠丝杠螺纹连接,提升架丝杠螺母固定架固接在提升架丝杠螺母的外侧,每个提升架直线滑轨上分别卡装有一组提升架滑块,提升架滑块与提升架直线滑轨滑动连接。
7、进一步地,所述平移板组件包括平移板、滑轮组件、吊索、从动齿轮、卷筒组件、主动齿轮、平移板减速电机支架和平移板减速电机,平移板水平固接在提升架丝杠螺母固定架和提升架滑块的上端面上,平移板减速电机通过平移板减速电机支架固接在平移板上端面的后侧,主动齿轮固接在平移板减速电机的输出轴上,卷筒组件设置在平移板减速电机的前侧,从动齿轮固接在卷筒组件一侧端面的外侧,从动齿轮与主动齿轮相啮合,滑轮组件设置在卷筒组件的前侧,吊索的一端固接在卷筒组件的外圈上,吊索的另一端绕过滑轮组件固接在下井机构上。
8、进一步地,所述下井机构包括直线运动单元、移动板组件、机器人手臂和末端开阀组件,直线运动单元竖直设置,且与平移板组件的执行端连接,移动板组件与直线运动单元沿竖直方向滑动连接,末端开阀组件通过机器人手臂与移动板组件连接。
9、进一步地,所述直线运动单元包括运动底板、直线运动减速电机、直线运动减速电机支架、直线运动轴承座、直线运动丝杠螺母安装架、直线运动丝杠螺母、直线运动滚珠丝杠、锁紧组件、两个直线运动滑轨和两组直线运动滑块,运动底板竖直设置,运动底板的上端与提升机构连接,且运动底板与提升机构之间设有锁紧组件,两个直线运动滑轨并列固接在运动底板的前端面上,每个直线运动滑轨分别沿竖直方向设置,直线运动滚珠丝杠平行设置在两个直线运动滑轨之间,直线运动滚珠丝杠的端部通过直线运动轴承座与运动底板的前端面转动连接,直线运动减速电机通过直线运动减速电机支架固接在运动底板的前端面上,直线运动减速电机的输出轴与直线运动滚珠丝杠的一端连接,直线运动丝杠螺母与直线运动滚珠丝杠螺纹连接,直线运动丝杠螺母安装架固接在直线运动丝杠螺母的外侧,每个直线运动滑轨上分别卡装有一组直线运动滑块,直线运动滑块与直线运动滑轨滑动连接。
10、进一步地,所述移动板组件包括移动板、监控摄像头和光源,移动板竖直固接在直线运动丝杠螺母安装架和直线运动滑块的外侧端面上,监控摄像头和光源固接在移动板的前端面上。
11、进一步地,所述机器人手臂为六轴协作机器人手臂。
12、进一步地,所述末端开阀组件包括电磁铁、磁铁座、末端旋转板、末端减速电机、拨盘、转台和末端视觉相机,末端旋转板的后端与机器人手臂的输出端连接,转台固接在末端旋转板外侧端面的前部,末端减速电机固接在末端旋转板的外侧端面上,末端减速电机的输出端与转台的输入端连接,拨盘固接在转台输出端的外侧端面上,磁铁座固接在末端旋转板外侧端面的后部,电磁铁固接在磁铁座的外侧端面上,末端视觉相机固接在末端旋转板的前端。
13、本发明与现有技术相比包含的有益效果是:
14、本发明的机器人代替人工进入井下作业。减轻了操作者的劳动强度,避免操作者进入恶劣的工作环境,避免井下环境对操作者身体的伤害。除了热网井室的开阀作业,本发明对供气地下管道、供水地下管道等的井室阀门操作都有适用性。
技术特征:
1.一种热网井室开阀机器人,其特征在于:它包括移动车(1)、电控小车(2)、提升机构(3)和下井机构(4),电控小车(2)和提升机构(3)设置在移动车(1)上,下井机构(4)与提升机构(3)连接,且下井机构(4)通过提升机构(3)分别沿竖直方向和水平方向移动,下井机构(4)的执行端具有六个移动自由度。
2.根据权利要求1所述一种热网井室开阀机器人,其特征在于:所述提升机构(3)包括提升座组件(31)、提升架组件(32)和平移板组件(33),提升座组件(31)竖直设置,提升架组件(32)与提升座组件(31)沿竖直方向滑动连接,平移板组件(33)与提升架组件(32)沿水平方向滑动连接。
3.根据权利要求2所述一种热网井室开阀机器人,其特征在于:所述提升座组件(31)包括提升座(311)、提升座减速电机(312)、提升座减速电机支架(313)、提升座丝杠螺母固定架(316)、提升座丝杠螺母(317)、提升座滚珠丝杠(318)、提升座丝杠轴承座(319)、两个提升座直线滑轨(314)和两组提升座滑块(315),提升座(311)竖直固接在移动车(1)的上端面上,两个提升座直线滑轨(314)并列固接在提升座(311)的前端面上,每个提升座直线滑轨(314)分别沿竖直方向设置,提升座滚珠丝杠(318)平行设置在两个提升座直线滑轨(314)之间,提升座滚珠丝杠(318)的端部通过提升座丝杠轴承座(319)与提升座(311)的前端面转动连接,提升座减速电机(312)通过提升座减速电机支架(313)固接在提升座(311)的前端面上,提升座减速电机(312)的输出轴与提升座滚珠丝杠(318)的一端连接,提升座丝杠螺母(317)与提升座滚珠丝杠(318)螺纹连接,提升座丝杠螺母固定架(316)固接在提升座丝杠螺母(317)的外侧,每个提升座直线滑轨(314)上分别卡装有一组提升座滑块(315),提升座滑块(315)与提升座直线滑轨(314)滑动连接。
4.根据权利要求3所述一种热网井室开阀机器人,其特征在于:所述提升架组件(32)包括提升架(321)、提升架丝杠螺母(322)、提升架丝杠螺母固定架(323)、提升架滚珠丝杠(326)、提升架丝杠轴承座(327)、提升架减速电机支架(328)、提升架减速电机(329)、两个提升架直线滑轨(324)和两组提升架滑块(325),提升架(321)的形状为l形,提升架(321)的竖直段固接在提升座滑块(315)和提升座丝杠螺母固定架(316)的外侧端面上,提升架(321)的水平段设置在提升座(311)的上部,两个提升架直线滑轨(324)并列固接在提升架(321)水平段的上端面上,每个提升架直线滑轨(324)分别沿水平方向设置,提升架滚珠丝杠(326)平行设置在两个提升架直线滑轨(324)之间,提升架滚珠丝杠(326)的端部通过提升架丝杠轴承座(327)与提升架(321)水平段的上端面转动连接,提升架减速电机(329)通过提升架减速电机支架(328)固接在提升架(321)水平段的上端面上,提升架减速电机(329)的输出轴与提升架滚珠丝杠(326)的一端连接,提升架丝杠螺母(322)与提升架滚珠丝杠(326)螺纹连接,提升架丝杠螺母固定架(323)固接在提升架丝杠螺母(322)的外侧,每个提升架直线滑轨(324)上分别卡装有一组提升架滑块(325),提升架滑块(325)与提升架直线滑轨(324)滑动连接。
5.根据权利要求4所述一种热网井室开阀机器人,其特征在于:所述平移板组件(33)包括平移板(331)、滑轮组件(332)、吊索(333)、从动齿轮(334)、卷筒组件(335)、主动齿轮(336)、平移板减速电机支架(337)和平移板减速电机(338),平移板(331)水平固接在提升架丝杠螺母固定架(323)和提升架滑块(325)的上端面上,平移板减速电机(338)通过平移板减速电机支架(337)固接在平移板(331)上端面的后侧,主动齿轮(336)固接在平移板减速电机(338)的输出轴上,卷筒组件(335)设置在平移板减速电机(338)的前侧,从动齿轮(334)固接在卷筒组件(335)一侧端面的外侧,从动齿轮(334)与主动齿轮(336)相啮合,滑轮组件(332)设置在卷筒组件(335)的前侧,吊索(333)的一端固接在卷筒组件(335)的外圈上,吊索(333)的另一端绕过滑轮组件(332)固接在下井机构(4)上。
6.根据权利要求1所述一种热网井室开阀机器人,其特征在于:所述下井机构(4)包括直线运动单元(41)、移动板组件(42)、机器人手臂(43)和末端开阀组件(44),直线运动单元(41)竖直设置,且与平移板组件(33)的执行端连接,移动板组件(42)与直线运动单元(41)沿竖直方向滑动连接,末端开阀组件(44)通过机器人手臂(43)与移动板组件(42)连接。
7.根据权利要求6所述一种热网井室开阀机器人,其特征在于:所述直线运动单元(41)包括运动底板(411)、直线运动减速电机(413)、直线运动减速电机支架(414)、直线运动轴承座(415)、直线运动丝杠螺母安装架(416)、直线运动丝杠螺母(417)、直线运动滚珠丝杠(418)、锁紧组件(41a)、两个直线运动滑轨(412)和两组直线运动滑块(419),运动底板(411)竖直设置,运动底板(411)的上端与提升机构(3)连接,且运动底板(411)与提升机构(3)之间设有锁紧组件(41a),两个直线运动滑轨(412)并列固接在运动底板(411)的前端面上,每个直线运动滑轨(412)分别沿竖直方向设置,直线运动滚珠丝杠(418)平行设置在两个直线运动滑轨(412)之间,直线运动滚珠丝杠(418)的端部通过直线运动轴承座(415)与运动底板(411)的前端面转动连接,直线运动减速电机(413)通过直线运动减速电机支架(414)固接在运动底板(411)的前端面上,直线运动减速电机(413)的输出轴与直线运动滚珠丝杠(418)的一端连接,直线运动丝杠螺母(417)与直线运动滚珠丝杠(418)螺纹连接,直线运动丝杠螺母安装架(416)固接在直线运动丝杠螺母(417)的外侧,每个直线运动滑轨(412)上分别卡装有一组直线运动滑块(419),直线运动滑块(419)与直线运动滑轨(412)滑动连接。
8.根据权利要求7所述一种热网井室开阀机器人,其特征在于:所述移动板组件(42)包括移动板(421)、监控摄像头(422)和光源(423),移动板(421)竖直固接在直线运动丝杠螺母安装架(416)和直线运动滑块(419)的外侧端面上,监控摄像头(422)和光源(423)固接在移动板(421)的前端面上。
9.根据权利要求6所述一种热网井室开阀机器人,其特征在于:所述机器人手臂(43)为六轴协作机器人手臂。
10.根据权利要求6所述一种热网井室开阀机器人,其特征在于:所述末端开阀组件(44)包括电磁铁(441)、磁铁座(442)、末端旋转板(443)、末端减速电机(444)、拨盘(445)、转台(446)和末端视觉相机(447),末端旋转板(443)的后端与机器人手臂(43)的输出端连接,转台(446)固接在末端旋转板(443)外侧端面的前部,末端减速电机(444)固接在末端旋转板(443)的外侧端面上,末端减速电机(444)的输出端与转台(446)的输入端连接,拨盘(445)固接在转台(446)输出端的外侧端面上,磁铁座(442)固接在末端旋转板(443)外侧端面的后部,电磁铁(441)固接在磁铁座(442)的外侧端面上,末端视觉相机(447)固接在末端旋转板(443)的前端。
技术总结
一种热网井室开阀机器人,它涉及一种开阀机器人。本发明为解决现有井室阀门的开关需要人工完成,作业环境差,劳动强度高,存在安全威胁的问题。本发明包括移动车、电控小车、提升机构和下井机构,电控小车和提升机构设置在移动车上,下井机构与提升机构连接,且下井机构通过提升机构分别沿竖直方向和水平方向移动,下井机构的执行端具有六个移动自由度。本发明用于热网井室阀门的开关。
技术研发人员:赵立军,张建军,梁培栋,张大明,刘海洋,冯宝屹
受保护的技术使用者:哈尔滨工业大学
技术研发日:
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!