一种长距离穿墙式双方向操作离合阀门驱动装置的制作方法
本技术涉及离合阀门,尤其涉及一种长距离穿墙式双方向操作离合阀门驱动装置。
背景技术:
1、在日常工作过程中,操作离合式阀门驱动装置,须工人在阀门就近处拔出阀门驱动装置的限位组件并转动偏心套,实现蜗轮蜗杆的分离和啮合,从而实现气动装置的自动操作和阀门驱动装置的人工操作之间的切换。
2、在发生气动执行装置发生错误操作或气体泄露等特殊情况时,仍须工人或消防员就近操作,增加了事故发生的风险,工人只能从单一方向执行离合操作。
技术实现思路
1、本实用新型主要提供一种长距离穿墙式双方向操作离合阀门驱动装置,可以保证工况环境安全的长距离穿墙式双方向操作离合阀门驱动装置。
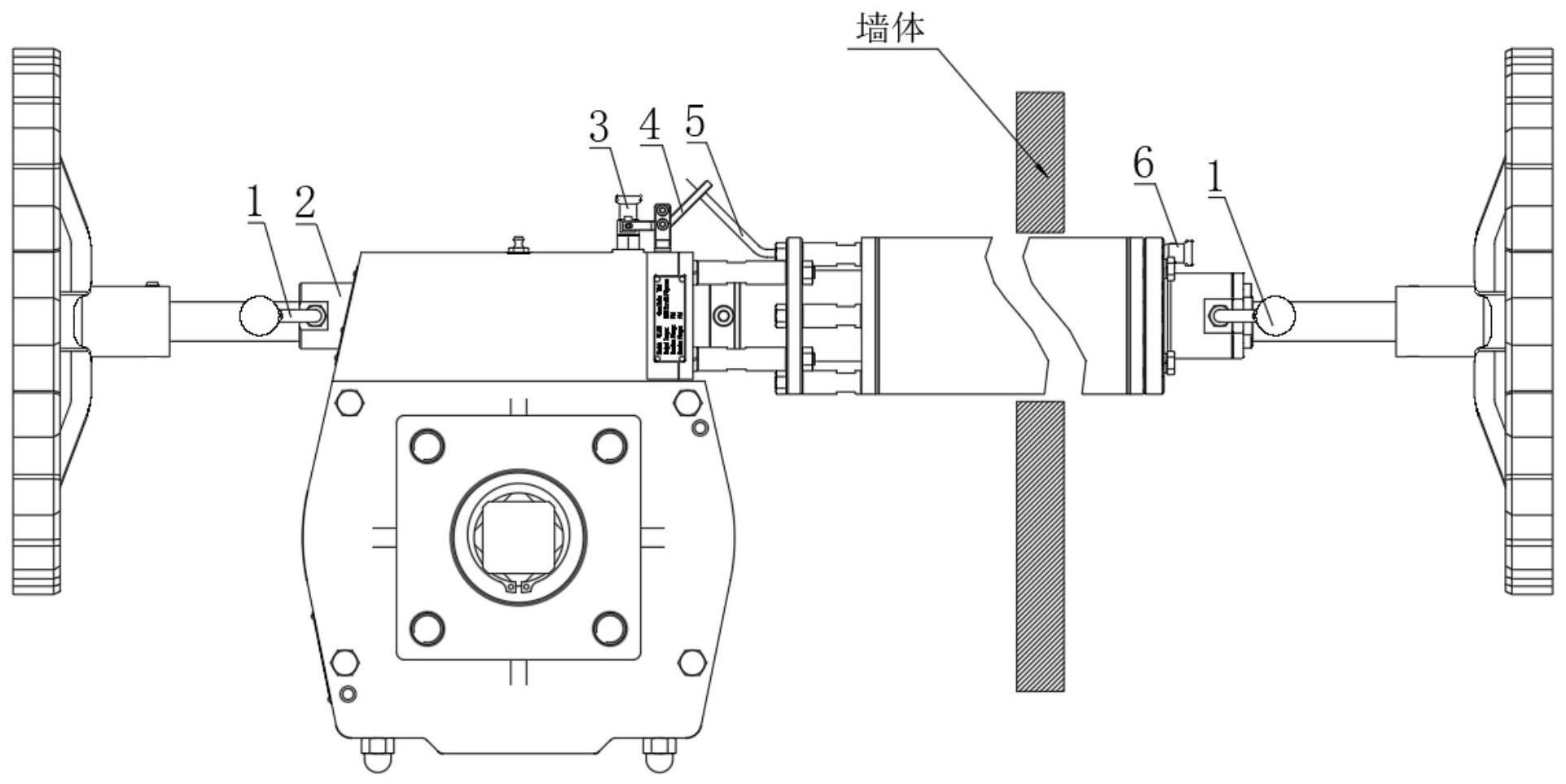
2、为了实现上述目的,本实用新型采用了如下技术方案:一种长距离穿墙式双方向操作离合阀门驱动装置,包括阀门驱动装置本体,所述阀门驱动装置本体的一侧设置有偏心组件,所述偏心组件前表面设置有手柄,所述阀门驱动装置本体的顶部靠近右侧的位置设置有定位组件,所述定位组件的外部设置有拨片,所述阀门驱动装置本体的右侧设置有配套外壳,所述配套外壳的右侧靠近顶部的位置设置有拉销,所述配套外壳的外表面位于拉销右侧的位置设置有另一个手柄,工人就近操作情况时,拉动定位组件,扳动手柄,即可扳动偏心组件,实现蜗轮蜗杆的分离与啮合,从而实现气动执行器的自动工作或阀门驱动装置本体的手动操作,完成阀门的开启与关闭,工人在室外远距离操作情况时,拉动拉销,经由刹车线拨动拨片,拉动定位组件,扳动手柄,即可扳动偏心组件,实现蜗轮蜗杆的分离与啮合,从而实现气动执行器的自动工作或阀门驱动装置的手动操作,完成阀门的开启与关闭,远近操作原理基本一致,方便了工人安全操作,本结构将室内、室外两种操作结合,远距离操作部分结构零件多数为无缝钢管焊接及标准件,降低了加工成本,减轻了产品的整体重量,避免因距离加长导致的中心倾斜等问题,降低了阀门驱动装置制造时的成本,并且切换输入的操作方式简单,过程迅速,在使用过程中兼顾了远程、就近切换操作两种功能,在安装时,客户仅需在墙壁开洞即可,无需破墙等破坏墙体承重等操作,保证了工况环境的安全。
3、进一步地,所述拉销与刹车线相配合,通过设置拉销起到了带动刹车线的作用。
4、进一步地,所述刹车线与所述拨片相连接,通过设置刹车线起到了远距离控制拨片的作用。
5、与现有技术相比,本实用新型的优点和积极效果在于,
6、本实用新型中,本结构将室内、室外两种操作结合,远距离操作部分结构零件多数为无缝钢管焊接及标准件,降低了加工成本,减轻了产品的整体重量,避免因距离加长导致的中心倾斜等问题,降低了阀门驱动装置制造时的成本,并且切换输入的操作方式简单,过程迅速,在使用过程中兼顾了远程、就近切换操作两种功能,在安装时,客户仅需在墙壁开洞即可,无需破墙等破坏墙体承重等操作,保证了工况环境的安全。
技术特征:
1.一种长距离穿墙式双方向操作离合阀门驱动装置,包括阀门驱动装置本体,其特征在于:所述阀门驱动装置本体的一侧设置有偏心组件(2),所述偏心组件(2)前表面设置有手柄(1),所述阀门驱动装置本体的顶部靠近右侧的位置设置有定位组件(3),所述定位组件(3)的外部设置有拨片(4)。
2.根据权利要求1所述的一种长距离穿墙式双方向操作离合阀门驱动装置,其特征在于:所述阀门驱动装置本体的右侧设置有配套外壳。
3.根据权利要求2所述的一种长距离穿墙式双方向操作离合阀门驱动装置,其特征在于:所述配套外壳的右侧靠近顶部的位置设置有拉销(6)。
4.根据权利要求3所述的一种长距离穿墙式双方向操作离合阀门驱动装置,其特征在于:所述配套外壳的外表面位于拉销(6)右侧的位置设置有另一个手柄(1)。
5.根据权利要求4所述的一种长距离穿墙式双方向操作离合阀门驱动装置,其特征在于:所述拉销(6)与刹车线(5)相配合。
6.根据权利要求5所述的一种长距离穿墙式双方向操作离合阀门驱动装置,其特征在于:所述刹车线(5)与所述拨片(4)相连接。
技术总结
本技术提供一种长距离穿墙式双方向操作离合阀门驱动装置,涉及离合阀门技术领域,包括阀门驱动装置本体,所述阀门驱动装置本体的一侧设置有偏心组件,所述偏心组件前表面设置有手柄。本技术,本结构将室内、室外两种操作结合,远距离操作部分结构零件多数为无缝钢管焊接及标准件,降低了加工成本,减轻了产品的整体重量,避免因距离加长导致的中心倾斜等问题,降低了阀门驱动装置制造时的成本,并且切换输入的操作方式简单,过程迅速,在使用过程中兼顾了远程、就近切换操作两种功能,在安装时,客户仅需在墙壁开洞即可,无需破墙等破坏墙体承重等操作,保证了工况环境的安全。
技术研发人员:朱鹏飞,鞠宇,似鹏坤
受保护的技术使用者:苏州工业园区思达德机械自控有限公司
技术研发日:20230517
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!