一种管道检测用水下机器人的制作方法
本技术属于机器人,具体涉及一种管道检测用水下机器人。
背景技术:
1、本部分的陈述仅仅是提供了与本公开相关的背景技术,并不必然构成现有技术。
2、城市下水管道在腐蚀、重压等作用下会出现裂纹、漏孔等一系列现象,所以在使用过程中,城市下水管道需要定期进行检测、维修、清理,保证管道运输安全和效率。水下机器人作为一种爬行设备逐步发展起来,水下机器人的发展为管道检测、维护提供了新的技术手段,极大提高了管道维护效率。
3、现有技术中,如专利号为cn218063945u的专利公开了一种管道声呐检测机器人,通过设置漂浮组件使得检测机器人漂浮在高水位的水面上,并在推进器内设置转动方向相反的螺旋桨使推进器在水面上进行移动,同时在机身上设置具备一定重力的声呐组件使声呐组件受到自身重力影响始终保持朝向水面下方,从而对水面以下的管道进行检测及数据采集,实现了检测机器人可以在高水位管道内的行进检测。
4、上述的管道检测机器人虽然能够实现对管道的检测,但是通过声呐检测到管道损伤位置的方式,并无法知晓管道损伤的程度,进而无法判断是否需要对其进行维修。此外,虽然现有的管道检测机器人也有搭载摄像头进行辅助检测的,但是摄像头在管道检测机器人上采用固定设置的方式,由于机器人在管道中存在一定的运动受限,使得固定在机器人上的摄像头所拍摄照片存在距离损伤位置较远、角度不好等问题,进而不能实现根据所拍摄的照片对所探测的管道损伤位置进行判断是否需要进行维修。
技术实现思路
1、本实用新型为了解决上述问题,提出了一种管道检测用水下机器人,通过第一机械臂和第二机械臂的转动将视觉摄像头移动到损伤位置,对损伤位置进行多角度拍照,进而能够实现后续根据所拍摄的照片对判断是否需要进行管道的维修。
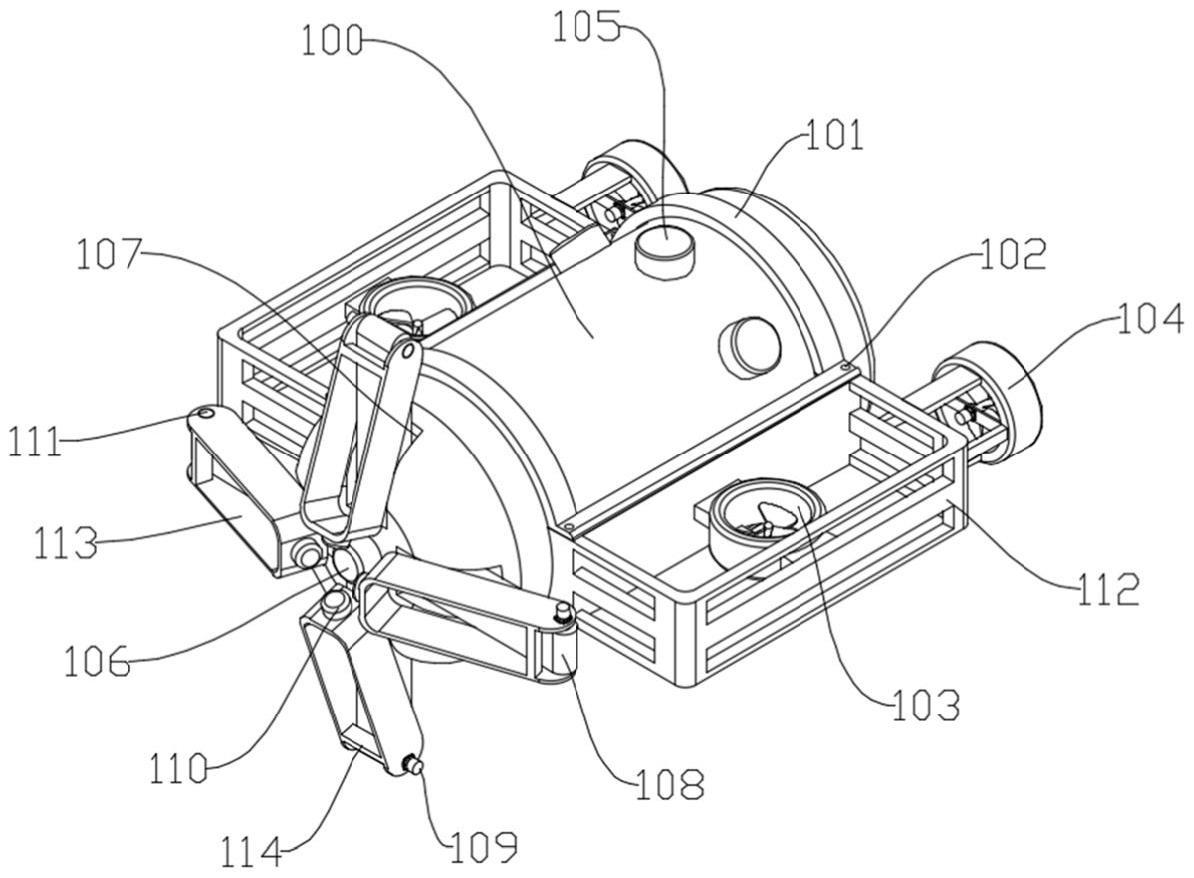
2、根据一些实施例,本实用新型采用如下技术方案:一种管道检测用水下机器人,包括:机器人本体,设置在机器人本体上的进退推进器、浮潜推进器、扫描声呐和检测机构;
3、所述检测结构包括与所述机器人本体转动连接的第一机械臂、与所述第一机械臂转动连接的第二机械臂,以及设置在所述第一机械臂上的视觉摄像头。
4、另外,根据本实用新型实施例的一种管道检测用水下机器人还可以具有以下附加技术特征:
5、优选的,所述进退推进器、浮潜推进器设置在动力框架内,所述动力框架通过环形连接杆与所述机器人本体固定连接。
6、优选的,所述第一机械臂通过第二动力轴与所述机器人本体转动连接,所述第二动力轴与第二电机的输出轴动力连接,所述第二动力轴与第二电机设置在机器人本体一端面的凹槽内。
7、优选的,所述第二机械臂通过第一动力轴与所述第一机械臂转动连接,所述第一动力轴与第一电机的输出轴动力连接,所述第一电机与所述第一机械臂的末端固定连接。
8、优选的,所述扫描声呐设置在与所述凹槽同一端面的机器人本体上。
9、优选的,所述机器人本体的侧面设置有多个测距传感器。
10、优选的,所述第一动力轴穿过所述第二机械臂一端的两侧。
11、优选的,所述第二动力轴穿过所述第一机械臂一端的两侧。
12、优选的,在所述第一机械臂上设置有限位块。
13、优选的,所述进退推进器和浮潜推进器设置为多个。
14、与现有技术相比,本实用新型的有益效果为:
15、在本实用新型中,第一机械臂上与机器人本体相对转动连接,第二机械臂与第一机械臂相对转动连接,视觉摄像头设置在第二机械臂上,在扫描声呐进行管道检测探伤时探测到损伤位置后,可通过第一机械臂和第二机械臂的转动将视觉摄像头移动到损伤位置,对损伤位置进行多角度的拍照,进而能够实现后续根据所拍摄的照片判断是否需要管道维修。
16、在本实用新型中,通过进退推进器、浮潜推进器的设置可实现机器人本体的前进、后退、转弯以及浮潜运动,使机器人本体在管道内行走自如。
技术特征:
1.一种管道检测用水下机器人,其特征在于,包括:机器人本体,设置在机器人本体上的进退推进器、浮潜推进器、扫描声呐和检测机构;
2.如权利要求1所述的一种管道检测用水下机器人,其特征在于,所述进退推进器、浮潜推进器设置在动力框架内,所述动力框架通过环形连接杆与所述机器人本体固定连接。
3.如权利要求1所述的一种管道检测用水下机器人,其特征在于,所述第一机械臂通过第二动力轴与所述机器人本体转动连接,所述第二动力轴与第二电机的输出轴动力连接,所述第二动力轴与第二电机设置在机器人本体一端面的凹槽内。
4.如权利要求1所述的一种管道检测用水下机器人,其特征在于,所述第二机械臂通过第一动力轴与所述第一机械臂转动连接,所述第一动力轴与第一电机的输出轴动力连接,所述第一电机与所述第一机械臂的末端固定连接。
5.如权利要求3所述的一种管道检测用水下机器人,其特征在于,所述扫描声呐设置在与所述凹槽同一端面的机器人本体上。
6.如权利要求1所述的一种管道检测用水下机器人,其特征在于,所述机器人本体的侧面设置有多个测距传感器。
7.如权利要求4所述的一种管道检测用水下机器人,其特征在于,所述第一动力轴穿过所述第二机械臂一端的两侧。
8.如权利要求3所述的一种管道检测用水下机器人,其特征在于,所述第二动力轴穿过所述第一机械臂一端的两侧。
9.如权利要求3所述的一种管道检测用水下机器人,其特征在于,在所述第一机械臂上设置有限位块。
10.如权利要求1所述的一种管道检测用水下机器人,其特征在于,所述进退推进器和浮潜推进器设置为多个。
技术总结
本技术提出一种管道检测用水下机器人,包括:机器人本体,设置在机器人本体上的进退推进器、浮潜推进器、扫描声呐和检测机构;所述检测结构包括与所述机器人本体转动连接的第一机械臂、与所述第一机械臂转动连接的第二机械臂,以及设置在所述第一机械臂上的视觉摄像头。在扫描声呐进行管道检测探伤时探测到损伤位置后,可通过第一机械臂和第二机械臂的转动将视觉摄像头移动到损伤位置,对损伤位置进行多角度的拍照,进而能够实现后续根据所拍摄的照片判断是否需要管道维修。
技术研发人员:刘邦坤,马凤英,纪鹏,罗光欣,陈新明,董万龙
受保护的技术使用者:山科华智(山东)机器人智能科技有限责任公司
技术研发日:20230602
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!