一种巡检机器人的制作方法
本技术涉及机器人,具体为一种巡检机器人。
背景技术:
1、由于工厂中存在一些狭小的区域人们难以进入(如各种各样的管道内部),但这些区域内在日常维护时同样需要进行检修或查看,因此为了方便对这些狭窄区域进行巡查或检修,一般会使用机器人进行巡检,为了方便机器人在狭小的区域内行走,一般会在该种机器人身上安装定位芯片,同时使用超宽带技术,以便于机器人做近距离精确室内定位,由于机器人自身搭在的摄像头大多处于机器人的前端,因此,机器人在狭窄的地方行进时,很难观察两侧的情况,在行进过程中其侧边一不小心就会与物体发生摩擦,导致机器人的侧边发生损坏。
2、现有技术,专利授权公告号为cn214564871u的专利,公开了一种巡检机器人,包括相互配合使用的上壳体、下壳体、安装支块、相机安装块、云台相机、多线激光雷达和单线激光雷达,所述安装支块下端设有配合单线激光雷达使用的槽口结构,所述上壳体内部靠近安装支块的一端前后侧均设有安装槽结构,所述上壳体安装槽结构内部均固定设有气体传感器,所述上壳体外部上端位于设置相机安装块的另一端设有gp天线,所述下壳体外部前后端上侧固定设有毫米波雷达,所述下壳体远离上壳体设置安装支块的一端下侧设有无线电充电模块,所述下壳体下端设有轮式底盘。该种巡检机器人与现有技术相比的优点在于:结构简单、功能多样化、动力充足和无线充电安全可靠。
3、现有的巡检机器人自身搭在的摄像头大多处于机器人的前端,因此,机器人在狭窄的地方行进时,如通风管道内,很难观察两侧的情况,在行进过程中一旦机器人的行进路线发生偏移,其侧边很容易就会与物体发生摩擦,导致机器人的侧边发生损坏。
技术实现思路
1、针对现有技术的不足,本实用新型提供一种巡检机器人,以解决背景技术提出的问题,使得机器人侧壁不易被刮伤。
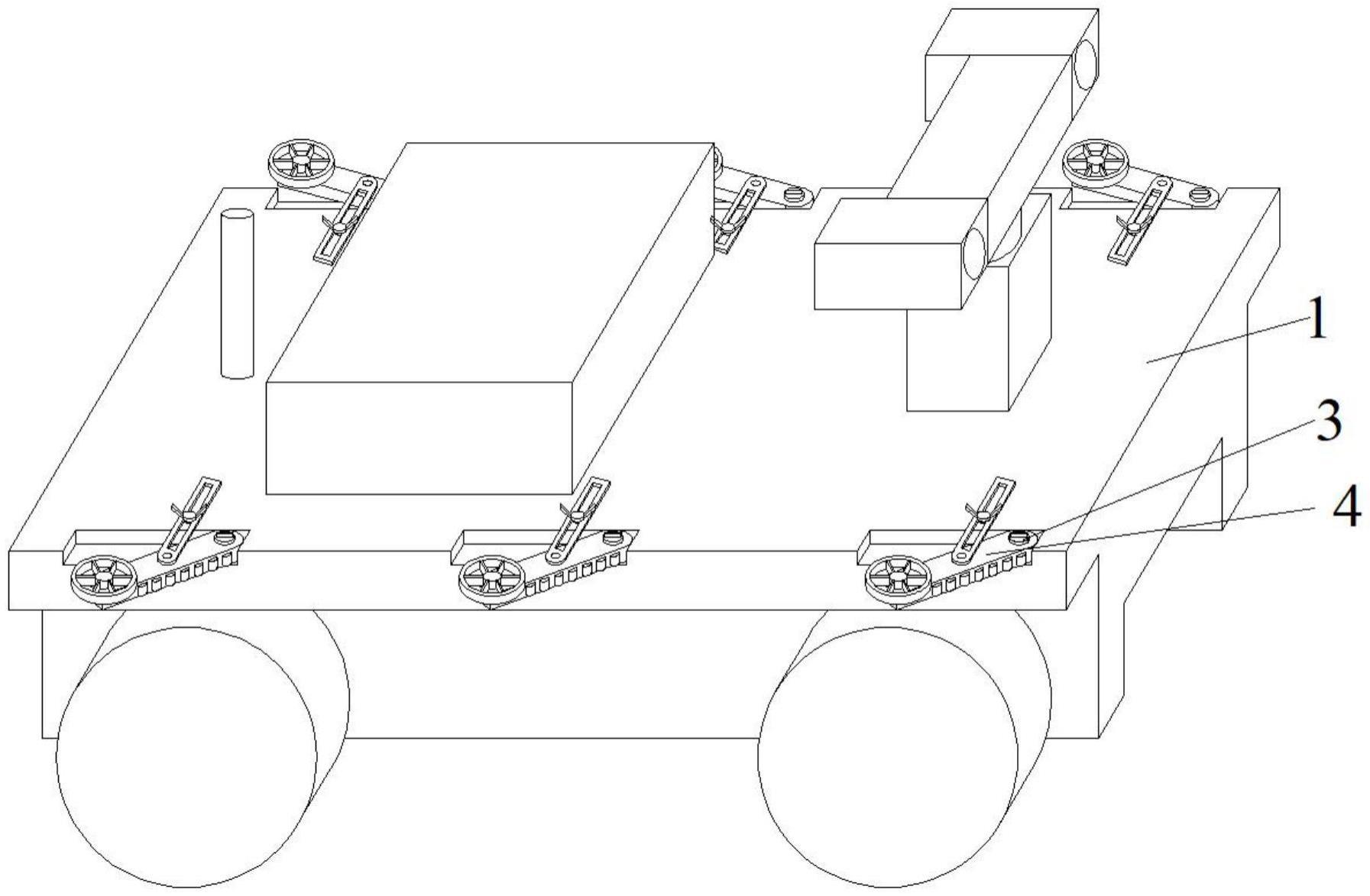
2、为实现上述的目的,本实用新型提供如下技术方案:一种巡检机器人,包括机器人主体,机器人主体顶部的两侧分别开设有至少两组对称设置的矩形槽,矩形槽前端的底部固接有转轴,转轴上活动连接有与矩形槽匹配设置的防擦块,转轴的顶部螺纹连接有旋钮,防擦块的一侧内转动连接有若干辊筒。
3、进一步地,防擦块一端的顶部转动连接有导向轮,导向轮的直径大于矩形槽的宽度。
4、进一步地,转轴的高度小于防擦块的高度,旋钮的顶端固接有把手,把手上开设有防滑纹。
5、进一步地,防擦块的上表面转动连接有定位板,定位板上开设有滑槽,机器人主体的表面开设有若干与矩形槽相对应的螺纹孔,螺纹孔内螺纹连接有与滑槽相匹配的固定螺栓。
6、进一步地,固定螺栓为蝶形设置。
7、与现有技术对比,本实用新型具备以下有益效果:
8、该种巡检机器人,通过防擦块一侧转动连接的辊筒,将机器人主体与物体隔绝,防止机器人主体的侧边因摩擦而损坏,同时辊筒在摩擦时会转动,降低摩擦造成的损耗,延长使用寿。
技术特征:
1.一种巡检机器人,包括机器人主体(1),其特征在于,机器人主体(1)顶部的两侧分别开设有至少两组对称设置的矩形槽(2),矩形槽(2)前端底部固接有转轴(11),转轴(11)上活动连接有与矩形槽(2)匹配设置的防擦块(4),转轴(11)的顶部螺纹连接有旋钮(3),防擦块(4)的一侧内转动连接有若干辊筒(5)。
2.根据权利要求1所述的一种巡检机器人,其特征在于,防擦块(4)一端的顶部转动连接有导向轮(6),导向轮(6)的直径大于矩形槽(2)的宽度。
3.根据权利要求1或2所述的一种巡检机器人,其特征在于,转轴(11)的高度小于防擦块(4)的高度,旋钮(3)的顶端固接有把手(10),把手(10)上开设有防滑纹。
4.根据权利要求1或2所述的一种巡检机器人,其特征在于,防擦块(4)的上表面转动连接有定位板(7),定位板(7)上开设有滑槽(8),机器人主体(1)的表面开设有若干与矩形槽(2)相对应的螺纹孔,螺纹孔内螺纹连接有与滑槽(8)相匹配的固定螺栓(9)。
5.根据权利要求3所述的一种巡检机器人,其特征在于,防擦块(4)的上表面转动连接有定位板(7),定位板(7)上开设有滑槽(8),机器人主体(1)的表面开设有若干与矩形槽(2)相对应的螺纹孔,螺纹孔内螺纹连接有与滑槽(8)相匹配的固定螺栓(9)。
6.根据权利要求4所述的一种巡检机器人,其特征在于,固定螺栓(9)为蝶形设置。
7.根据权利要求5所述的一种巡检机器人,其特征在于,固定螺栓(9)为蝶形设置。
技术总结
本技术涉及机器人技术领域,且公开了一种巡检机器人,包括机器人主体,机器人主体顶部的两侧分别开设有至少两组对称设置的矩形槽,矩形槽前端的底部固接有转轴,转轴上活动连接有与矩形槽匹配设置的防擦块,转轴的顶部螺纹连接有旋钮,防擦块的一侧内转动连接有若干辊筒。该种巡检机器人,通过防擦块一侧转动连接的辊筒,将机器人主体与物体隔绝,防止机器人主体的侧边因摩擦而损坏,同时辊筒在摩擦时会转动,降低摩擦造成的损耗,延长使用寿命,在管道等宽度较窄,但长度较长的区域中使用时,将导向轮与管道等通道的侧壁相抵,防止机器人撞击管道的侧壁,降低远程操作难度。
技术研发人员:朱冬,方向明,宋雯,禹浪,胡江,李欣
受保护的技术使用者:七腾机器人有限公司
技术研发日:20230629
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!