一种欠驱动水中管道机器人的制作方法
本技术涉及机器人,尤其涉及一种欠驱动水中管道机器人。
背景技术:
1、随着石油、化工、天然气以及核工业等,在发展中都会需要到管道检测或者维护等工作,在对管道的检测以及维护时会使用到管道机器人,例如欠驱动管道机器人,欠驱动管道机器人的意思,就是管道机器人本身没有前进的动力,因此只能根据管道内液体的流动前进。
2、但采用上述方式,欠驱管道机器的外径尺寸是固定的,在针对不同的管道尺寸无法进行调节,导致尺寸无法与管道进行贴合会从而降低液体对其产生的推力。
技术实现思路
1、本实用新型的目的在于提供一种欠驱动水中管道机器人,旨在解决现有欠驱管道机器的外径尺寸是固定的,在针对不同的管道尺寸无法进行调节,导致尺寸无法与管道进行贴合从而降低液体对其产生的推力的问题。
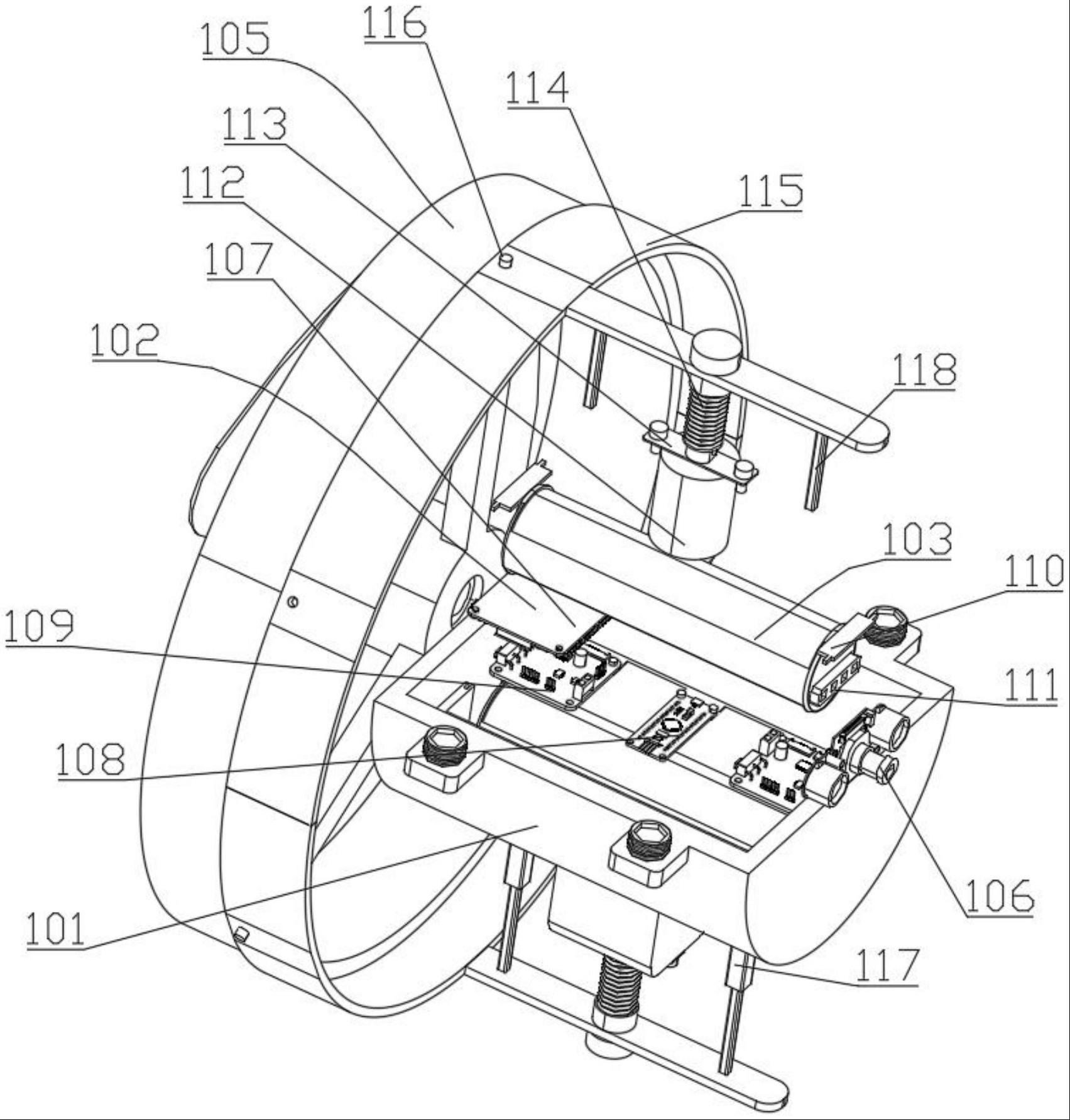
2、为实现上述目的,本实用新型提供了一种欠驱动水中管道机器人,包括主机壳、电动控制模块、两个储电模块、两个调节固定件、欠驱螺旋件和树莓派夜视摄像机,所述电动控制模块设置于所述主机壳内部;两个所述储电模块分别设置于所述主机壳内部,且分别与所述电动控制模块电连接;两个所述调节固定件分别设置于所述主机壳两侧;所述欠驱螺旋件分别与两个所述调节固定件可拆卸连接,并位于两个所述调节固定件之间;所述树莓派夜视摄像机固定设置于所述主机壳一侧,且与所述电动控制模块电连接。
3、其中,所述电动控制模块包括树莓派处理器、stm32小系统板和两个电机驱动板,所述树莓派处理器固定设置于所述主机壳内部;所述stm32小系统板固定设置于所述主机壳内部,且与所述树莓派处理器电连接;两个所述电机驱动板分别固定设置于所述主机壳内部;且分别与所述树莓派处理器电连接。
4、其中,所述储电模块包括电池放置框架和电池,所述电池放置框架固定设置于所述主机壳内部;所述电池与所述电池放置框架固定连接,且与所述树莓派处理器电连接,并位于所述电池放置框架一侧。
5、其中,所述调节固定件包括电机、电机固定片、丝杠、调节外壳、多个固定螺钉、两个滑框和两个导轨,所述电机与所述主机壳固定连接,并位于所述主机壳内部;所述电机固定片与所述电机固定连接,并位于所述电机一侧;所述丝杠与所述电机输出端固定连接,并位于所述电机一侧;所述调节外壳与所述丝杠螺纹连接,并位于所述调节外壳一侧;多个所述固定螺钉分别与所述调节外壳螺纹连接,并分别位于所述调节外壳一侧;两个所述滑框分别与所述主机壳固定连接,并分别位于所述主机壳一侧;两个所述导轨分别与所述调节外壳固定连接,且分别与两个所述滑框滑动连接,并分别位于所述调节外壳两侧。
6、其中,所述欠驱螺旋件包括欠驱螺旋架、螺旋桨固定架和螺旋桨,所述欠驱螺旋架分别与两个所述调节外壳可拆卸连接,并位于两个所述调节外壳之间;所述螺旋桨固定架与所述欠驱螺旋架固定连接,并位于所述欠驱螺旋架一侧;所述螺旋桨与所述螺旋桨固定架转动连接,并位于所述螺旋桨固定架一侧。
7、本实用新型的一种欠驱动水中管道机器人,所述主机壳用于支撑所述电动控制模块、两个所述储电模块和两个调节固定件的安装,两个所述储电模块用于对整体设备进行能源供给,通过所述电动控制模块的控制使得两个所述调节固定件开合达到与管道相匹配的尺寸,然后将合适尺寸的所述欠驱螺旋件与所述调节固定件进行配合完成安装,整体设备贴合管道内壁然后通过管道内的液体对其推动前进通过所述树莓派夜视摄像机对管道内部情况进行检测,从而解决现有欠驱管道机器的外径尺寸是固定的,在针对不同的管道尺寸无法进行调节,导致尺寸无法与管道进行贴合从而降低液体对其产生的推力的问题。
技术特征:
1.一种欠驱动水中管道机器人,其特征在于,
2.如权利要求1所述的一种欠驱动水中管道机器人,其特征在于,
3.如权利要求2所述的一种欠驱动水中管道机器人,其特征在于,
4.如权利要求3所述的一种欠驱动水中管道机器人,其特征在于,
5.如权利要求4所述的一种欠驱动水中管道机器人,其特征在于,
技术总结
本技术涉及机器人技术领域,具体涉及一种欠驱动水中管道机器人,包括主机壳、电动控制模块、两个储电模块、两个调节固定件、欠驱螺旋件和树莓派夜视摄像机,两个储电模块用于对整体设备进行能源供给,通过电动控制模块的控制使得两个调节固定件开合达到与管道相匹配的尺寸,然后将合适尺寸的欠驱螺旋件与调节固定件进行配合完成安装,整体设备贴合管道内壁然后通过管道内的液体对其推动前进通过树莓派夜视摄像机对管道内部情况进行检测,从而解决现有欠驱管道机器的外径尺寸是固定的,在针对不同的管道尺寸无法进行调节,导致尺寸无法与管道进行贴合从而降低液体对其产生的推力的问题。
技术研发人员:李根,王树淇,黎泽伦,陈茂盛,成建渝,周师杰
受保护的技术使用者:苏州讯动气体科技有限公司
技术研发日:20230711
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!