一种新型智能轨道巡检机器人的制作方法
本技术属于巡检机器人,具体为一种新型智能轨道巡检机器人。
背景技术:
1、从客户体验角度来看,"巡检机器人"会模拟客户提前发现app使用可能存在的问题,如断点、卡顿等,可以和惯常的系统数据监控形成互补,凭借前置发现问题更好提升客户体验。从公司运营角度来看,"巡检机器人"定期智能产出前一天的整体异常报告,以便专业工作人员进一步关注分析潜在问题,并迭代优化机器人,为用户的财富安全与稳健体验提供更加智能、便捷、专业的服务。
2、轨道型巡检机器人在进行巡检时,需要在轨道的上部进行滑动工作,使得机器人随着轨道进行巡检工作,但机器人在轨道的上部进行滑动时,存在这以下缺点,其一、巡检机器人在安装在轨道的上部时,较为麻烦,无法有效的对巡检机器人进行安装工作,其二、巡检机器人的监控装置多数采用固定设置,导致监控装置在进行监控拍摄时,容易产生监控死角,无法很好的进行巡检工作,为此,我们提出了一种新型智能轨道巡检机器人。
技术实现思路
1、针对上述情况,为克服现有技术的缺陷,本实用新型提供一种新型智能轨道巡检机器人,有效的解决了背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:一种新型智能轨道巡检机器人,包括轨道滑动架,所述轨道滑动架的内部均匀设置有驱动轮,所述驱动轮的底部轴杆贯穿所述轨道滑动架并设置有链轮,两组所述链轮相啮合,所述轨道滑动架的上部设置有第一马达,所述第一马达的转子与驱动轮相连接,所述轨道滑动架的底部设置有角度调节座,所述角度调节座的底部设置有监控安装架,所述监控安装架的内部安装有监控装置,所述监控装置的背侧均匀开设有齿槽,所述监控安装架的右侧设置有第二马达,所述第二马达的转子上部设置有拨动齿轮,所述拨动齿轮与齿槽相啮合。
3、优选的,所述轨道滑动架由第一架体与第二架体组成,所述第一架体的内部开设有滑动槽,所述滑动槽的内部设置有缓冲簧,所述第二架体的内侧设置有插接杆,所述插接杆的一端与缓冲簧相连接。
4、优选的,所述轨道滑动架的内部均匀设置有从动轮,所述驱动轮与从动轮的外侧面均开设有滚动槽。
5、优选的,所述驱动轮的轴杆底部设置有链带,所述链带活动连接在链轮的上部。
6、优选的,所述角度调节座包括转动架与旋转架,所述旋转架活动连接在转动架的内部。
7、优选的,所述转动架的内部安装有第三马达,所述第三马达的转子与旋转架相连接。
8、与现有技术相比,本实用新型的有益效果是:
9、1.通过设置有角度调节座,可有效的对监控安装架的位置进行限定工作,且通过监控安装架对监控装置的位置进行限定工作,且通过运行第二马达进行工作,通过第二马达的转动带动拨动齿轮进行旋转工作,通过拨动齿轮的转动对监控装置背侧的齿槽进行拨动工作,从而对监控装置的角度进行调节工作,使得监控装置更好的进行多角度监控工作;
10、2.通过第一架体内部的开设的滑动槽,可有效的对插接杆的位置进行限定工作,通过设置有缓冲簧,可对插接杆的位置进行限定工作,使得插接杆自动进行复位工作,从而对第二架体的位置进行限定,当轨道滑动架在进行安装时,可通过拉伸第二架体,对第一架体与第二架体的间距进行调节工作,以辅助轨道滑动架更好的安装在轨道座的上部;
11、3.通过转动架内部的第三马达,可有效的对第三马达的位置进行限定工作,通过运行第三马达进行工作,通过第三马达带动旋转架进行旋转工作,通过旋转架的转动带动监控安装架进行旋转工作,辅助监控装置进行左右旋转调节工作。
技术特征:
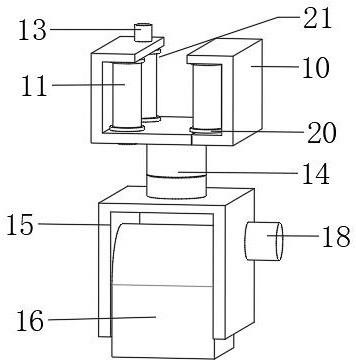
1.一种新型智能轨道巡检机器人,其特征在于:包括轨道滑动架(10),所述轨道滑动架(10)的内部均匀设置有驱动轮(11),所述驱动轮(11)的底部轴杆贯穿所述轨道滑动架(10)并设置有链轮(12),两组所述链轮(12)相啮合,所述轨道滑动架(10)的上部设置有第一马达(13),所述第一马达(13)的转子与驱动轮(11)相连接,所述轨道滑动架(10)的底部设置有角度调节座(14),所述角度调节座(14)的底部设置有监控安装架(15),所述监控安装架(15)的内部安装有监控装置(16),所述监控装置(16)的背侧均匀开设有齿槽(17),所述监控安装架(15)的右侧设置有第二马达(18),所述第二马达(18)的转子上部设置有拨动齿轮(19),所述拨动齿轮(19)与齿槽(17)相啮合。
2.根据权利要求1所述的一种新型智能轨道巡检机器人,其特征在于:所述轨道滑动架(10)由第一架体(100)与第二架体(101)组成,所述第一架体(100)的内部开设有滑动槽(102),所述滑动槽(102)的内部设置有缓冲簧(103),所述第二架体(101)的内侧设置有插接杆(104),所述插接杆(104)的一端与缓冲簧(103)相连接。
3.根据权利要求2所述的一种新型智能轨道巡检机器人,其特征在于:所述轨道滑动架(10)的内部均匀设置有从动轮(20),所述驱动轮(11)与从动轮(20)的外侧面均开设有滚动槽(21)。
4.根据权利要求3所述的一种新型智能轨道巡检机器人,其特征在于:所述驱动轮(11)的轴杆底部设置有链带,所述链带活动连接在链轮(12)的上部。
5.根据权利要求4所述的一种新型智能轨道巡检机器人,其特征在于:所述角度调节座(14)包括转动架(140)与旋转架(141),所述旋转架(141)活动连接在转动架(140)的内部。
6.根据权利要求5所述的一种新型智能轨道巡检机器人,其特征在于:所述转动架(140)的内部安装有第三马达(142),所述第三马达(142)的转子与旋转架(141)相连接。
技术总结
本技术涉及巡检机器人技术领域,且公开了一种新型智能轨道巡检机器人,包括轨道滑动架,所述轨道滑动架的内部均匀设置有驱动轮,所述驱动轮的底部轴杆贯穿所述轨道滑动架并设置有链轮,两组所述链轮相啮合,所述轨道滑动架的上部设置有第一马达,所述第一马达的转子与驱动轮相连接,所述轨道滑动架的底部设置有角度调节座,所述角度调节座的底部设置有监控安装架,所述监控安装架的内部安装有监控装置,本新型方案可通过第二马达的转动带动拨动齿轮进行旋转工作,通过拨动齿轮的转动对监控装置背侧的齿槽进行拨动工作,从而对监控装置的角度进行调节工作,使得监控装置更好的进行多角度监控工作。
技术研发人员:郭彦军
受保护的技术使用者:阳煤集团寿阳景福煤业有限公司
技术研发日:20230718
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!