一种具有下置手动驱动机构的智能电动阀执行器的制作方法
本技术属于阀门领域,具体涉及一种具有下置手动驱动机构的智能电动阀执行器。
背景技术:
1、电动智能阀是一种能够远程控制开关的阀门,其通过执行器实现。执行器在使用时安装于电动智能阀上端,其包括塑料外壳、电机、传动箱、执行部件等结构,电机通过传动箱带动执行部件转动, 执行部件与智能电动阀的主轴配合,带动智能电动阀开关,由于执行器是电控的,其存在断电失灵的风险,因此有人提出在执行器中增加手动驱动机构,在断电时通过手动驱动机构开关智能电动阀,但是目前带有手动驱动机构的智能电动阀执行器依然存在以下问题:
2、1)手动驱动机构与传动箱之间缺少离合结构,在通电时,手动驱动机构会跟着传动箱一起转动,增加了电机的负载,同时也增加了手动驱动机构与传动箱之间的磨损,使手动驱动机构更易磨损失效,而且还增加了误操作的风险;
3、2)手动驱动机构位于外壳顶部,影响美观。
技术实现思路
1、为了弥补现有技术的不足,本实用新型提供一种具有下置手动驱动机构的智能电动阀执行器技术方案。
2、一种具有下置手动驱动机构的智能电动阀执行器,包括外壳,所述外壳内设置依次传动配合的电机、传动箱和执行部件,所述外壳上设置手动驱动机构,所述手动驱动机构包括手动传动杆、弹性件和手动传动齿轮,所述手动传动杆滑动插接于外壳壳壁上,所述弹性件将手动传动杆朝离开外壳内部的方向推压,所述手动传动齿轮位于外壳内部并设置于手动传动杆上,所述传动箱具有一手动输入轴,该手动输入轴上设置手动输入齿轮;
3、所述手动驱动机构配置为:当手动传动杆受到朝向外壳内部的推力时,手动传动杆克服弹性件的弹力朝外壳内部移动并使手动传动齿轮与手动输入齿轮啮合,以实现执行器的手动驱动;当手动传动杆不再受到朝向外壳内部的推力时,弹性件带动手动传动杆复位,手动传动齿轮与手动输入齿轮分离。
4、进一步地,所述弹性件在轴向可压缩,其为弹簧或弹性环。
5、进一步地,所述外壳的壳壁上设置用以与手动传动杆滑动插配的安装槽,所述弹性件连接于手动传动杆与安装槽内壁之间。
6、进一步地,所述手动传动杆外壁与安装槽内壁之间还设置密封圈。
7、进一步地,所述手动传动杆背向外壳内部一端设置扳手配合部,所述扳手配合部用以与扳手连接。
8、进一步地,所述手动传动齿轮和手动输入齿轮均为伞齿轮,两者的轴心相垂直。
9、进一步地,所述手动传动杆和手动传动齿轮的轴心水平设置,所述手动输入轴和手动输入齿轮的轴心竖直设置。
10、进一步地,所述手动驱动机构设置于外壳的下端侧部。
11、与现有技术相比,本实用新型的有益效果是:
12、本实用新型通过弹性件实现了手动驱动机构与传动箱之间的离合功能,使手动驱动机构在执行器通电时不会随着传动箱一起转动,降低了电机负载,减小了磨损,更进一步避免了误操作的可能。而且本实用新型中手动驱动机构位于外壳下部,并不显眼,使本实施例的整体外形更加美观。
技术特征:
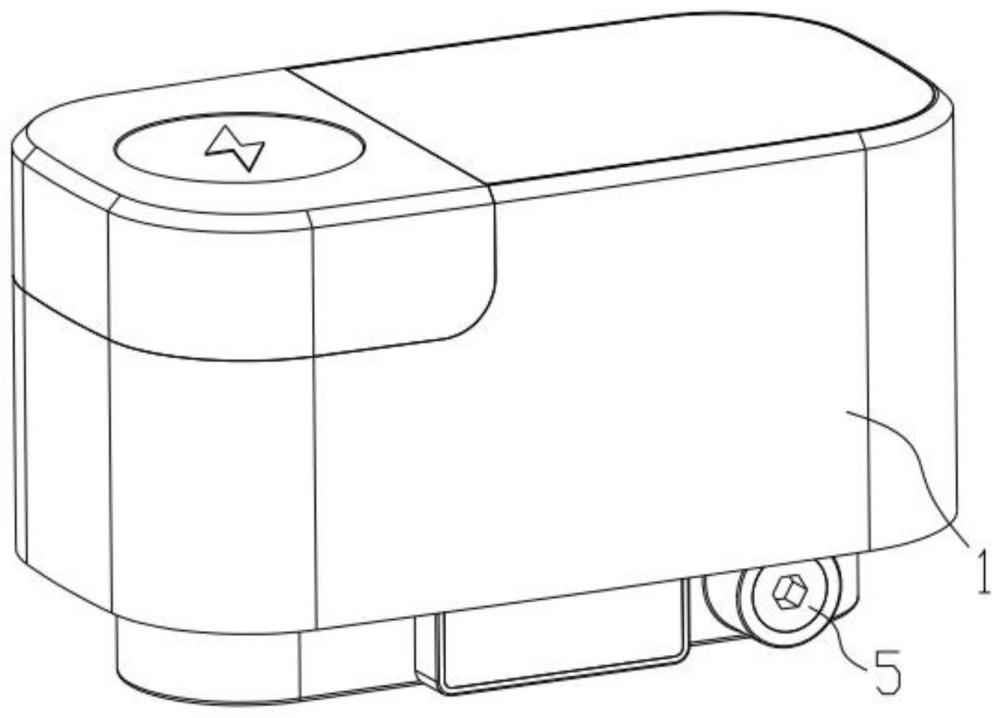
1.一种具有下置手动驱动机构的智能电动阀执行器,包括外壳(1),所述外壳(1)内设置依次传动配合的电机(2)、传动箱(3)和执行部件(4),其特征在于,所述外壳(1)上设置手动驱动机构(5),所述手动驱动机构(5)包括手动传动杆(500)、弹性件(501)和手动传动齿轮(502),所述手动传动杆(500)滑动插接于外壳(1)壳壁上,所述弹性件(501)将手动传动杆(500)朝离开外壳(1)内部的方向推压,所述手动传动齿轮(502)位于外壳(1)内部并设置于手动传动杆(500)上,所述传动箱(3)具有一手动输入轴(300),该手动输入轴(300)上设置手动输入齿轮(301);
2.根据权利要求1所述的一种具有下置手动驱动机构的智能电动阀执行器,其特征在于,所述弹性件(501)在轴向可压缩,其为弹簧或弹性环。
3.根据权利要求1所述的一种具有下置手动驱动机构的智能电动阀执行器,其特征在于,所述外壳(1)的壳壁上设置用以与手动传动杆(500)滑动插配的安装槽(100),所述弹性件(501)连接于手动传动杆(500)与安装槽(100)内壁之间。
4.根据权利要求3所述的一种具有下置手动驱动机构的智能电动阀执行器,其特征在于,所述手动传动杆(500)外壁与安装槽(100)内壁之间还设置密封圈(503)。
5.根据权利要求1所述的一种具有下置手动驱动机构的智能电动阀执行器,其特征在于,所述手动传动杆(500)背向外壳(1)内部一端设置扳手配合部(5000),所述扳手配合部(5000)用以与扳手连接。
6.根据权利要求1所述的一种具有下置手动驱动机构的智能电动阀执行器,其特征在于,所述手动传动齿轮(502)和手动输入齿轮(301)均为伞齿轮,两者的轴心相垂直。
7.根据权利要求6所述的一种具有下置手动驱动机构的智能电动阀执行器,其特征在于,所述手动传动杆(500)和手动传动齿轮(502)的轴心水平设置,所述手动输入轴(300)和手动输入齿轮(301)的轴心竖直设置。
8.根据权利要求1所述的一种具有下置手动驱动机构的智能电动阀执行器,其特征在于,所述手动驱动机构(5)设置于外壳(1)的下端侧部。
技术总结
本技术属于阀门领域,具体涉及一种具有下置手动驱动机构的智能电动阀执行器,包括外壳,外壳内设置电机、传动箱和执行部件,外壳的下部还设置手动驱动机构,手动驱动机构包括手动传动杆、弹性件和手动传动齿轮,手动传动杆滑动插接于外壳壳壁上,弹性件将手动传动杆朝离开外壳内部的方向推动,手动传动齿轮位于外壳内部并设置于手动传动杆上,传动箱具有一手动输入轴,该手动输入轴上设置手动输入齿轮。本技术通过弹性件实现了手动驱动机构与传动箱之间的离合功能,使手动驱动机构在执行器通电时不会随着传动箱一起转动,降低了电机负载,减小了磨损,更进一步避免了误操作的可能。
技术研发人员:唐勇,黄梓轶
受保护的技术使用者:余姚市地集通阀门科技有限公司
技术研发日:20230810
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!