一种水下线缆布放机器人的链轮传动结构的制作方法
本技术涉及水下线缆布放机器人,具体为一种水下线缆布放机器人的链轮传动结构。
背景技术:
1、水下线缆布放机器人是一种专门用于布放水下电缆的机器人,它通常由传动机构、控制系统和布放装置组成,传动机构是机器人的关键部分,它负责驱动机器人在水下移动并完成线缆的布放任务,传动机构通常采用液压系统或电动机驱动,具有良好的防水性能和稳定的动力输出。
2、目前链轮传动系统通过计算主动链轮与被动链轮的传动比来实现被动端的需求速度,磨损后易发生跳齿。在链轮张紧方面现有的张紧装置通常采用弹簧的预紧力对链条的松紧进行调节(如下图3),该张紧装置会随着使用时间的增加,可靠性会大大减低,当驱动装置进行加减速是作用不明显,从而无法对链条起到张紧作用,且长时间与链条接触会造成一部分机械能的损失及磨损链条。
技术实现思路
1、针对现有技术中存在的问题,本实用新型的目的在于提供一种水下线缆布放机器人的链轮传动结构。
2、为解决背景技术问题,本实用新型采用如下的技术方案。
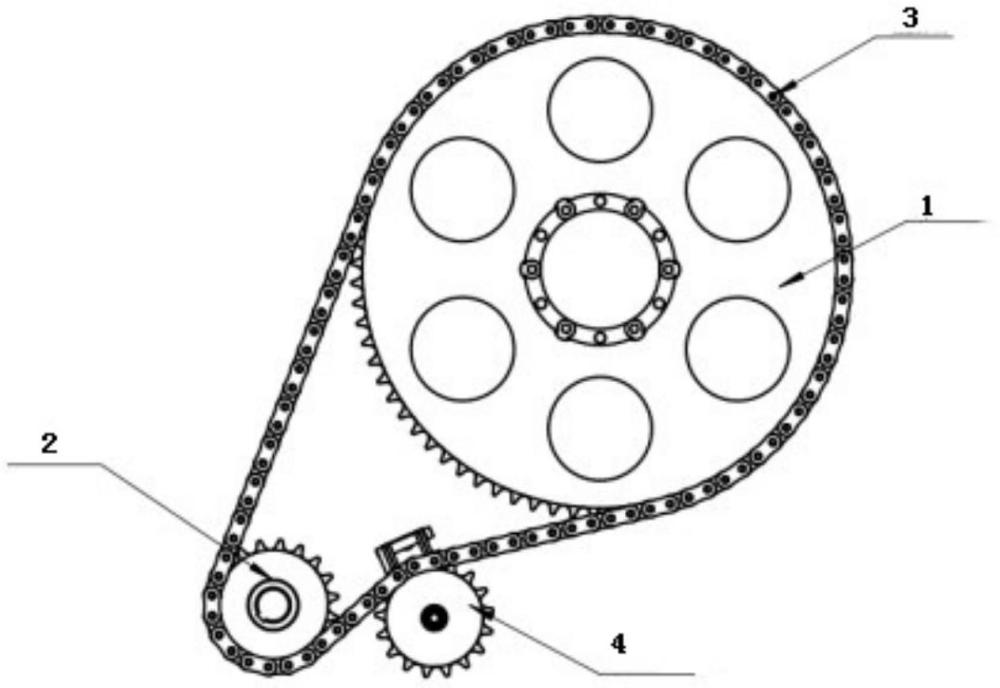
3、一种水下线缆布放机器人的链轮传动结构,包括传动链轮一,所述传动链轮一的左侧设置有传动链轮二,所述传动链轮二的外圈设置有传动链条,所述传动链轮一与传动链轮二均与传动链条接触并啮合,所述传动链轮一与传动链轮二通过传动链条传动连接,所述传动链条的底部设置有张紧机构;
4、所述张紧机构包含有安装架,所述安装架设置在传动链条的背面,所述安装架上可滑动连接有固定架,所述固定架的正面转动连接有张力轮,所述张力轮与传动链条接触并啮合,所述固定架的内壁上固定连接有两个螺纹管,所述安装架的正面螺纹连接有两个定位杆,所述定位杆背面的一端贯穿螺纹管并延伸至安装架的背面。
5、作为上述技术方案的进一步描述:所述安装架的正面设置有两个垫片,所述定位杆与垫片相接触。
6、相比于现有技术,本实用新型的优点在于:
7、本实用新型中,本发明传动链条与张紧机构通过传动链轮一与传动链轮二连接,机构运行过程中链轮随着传动链条转动,减低了链轮传动过程中损失的动能,减低了传动链条的磨损,提高使用寿命,张紧机构采用刚性连接,区别于现有的柔性连接,提高了张紧机构的使用寿命,且因为刚性连接,所以链轮与链条的相对位置不会变化,故能很好的防止跳齿现象的发生。
技术特征:
1.一种水下线缆布放机器人的链轮传动结构,包括传动链轮一(1),其特征在于:所述传动链轮一(1)的左侧设置有传动链轮二(2),所述传动链轮二(2)的外圈设置有传动链条(3),所述传动链轮一(1)与传动链轮二(2)均与传动链条(3)接触并啮合,所述传动链轮一(1)与传动链轮二(2)通过传动链条(3)传动连接,所述传动链条(3)的底部设置有张紧机构(4);
2.根据权利要求1所述的一种水下线缆布放机器人的链轮传动结构,其特征在于:所述安装架(401)的正面设置有两个垫片(5),所述定位杆(405)与垫片(5)相接触。
技术总结
本技术公开了一种水下线缆布放机器人的链轮传动结构,一种水下线缆布放机器人的链轮传动结构,包括传动链轮一,所述传动链轮一的左侧设置有传动链轮二,所述传动链轮二的外圈设置有传动链条,所述传动链轮一与传动链轮二均与传动链条接触并啮合,所述传动链轮一与传动链轮二通过传动链条传动连接。该技术,传动链条与张紧机构通过传动链轮一与传动链轮二连接,机构运行过程中链轮随着传动链条转动,减低了链轮传动过程中损失的动能,减低了传动链条的磨损,提高使用寿命,张紧机构采用刚性连接,区别于现有的柔性连接,提高了张紧机构的使用寿命,且因为刚性连接,所以链轮与链条的相对位置不会变化,故能很好的防止跳齿现象的发生。
技术研发人员:黄杰龙,马亦鸣,丁山
受保护的技术使用者:深海智人(广州)技术有限公司
技术研发日:20230830
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!