一种拖拉机梭式换挡变速箱的挡位监测装置
本发明属于农业机械领域,具体涉及拖拉机的传感器技术。
背景技术:
1、我国的拖拉机变速箱大多数采用机械换挡方式,具有结构简单、工作可靠、维护成本低廉的有点,但随着自动化、物联网技术的飞速发展,智能控制成为拖拉机的一个发展趋势,其中,动力换挡以其动力切换平顺、自适应负载的优点,已经推出了一批产品,但因动力换挡的成本较高,中小马力拖拉机采用amt技术路线实现自动换挡成为一个贴合实际需求的选择。amt变速箱的优点是保留了成熟的机械换挡传动结构,使用电液机构代替或补充了手动控制。由于液压系统的动作比较快,要使拨叉轴能在运动中准确地停在中间的空挡位置是一大难题,其中监测拨叉轴的位移成为实现精确控制的必要保障。市场上虽有成品的挡位传感器,但大多数只能获得固定挡位位置的信号,无法获取位移量。例如实用新型专利“一种车辆的全挡位监测装置”(zl202220948483)针对驾考过程的电子化监测需求,对拨叉轴的两端分别安放了一只接近开关,由此识别出挡位状态,但此方案无法获得拨叉轴的位移信息;实用新型专利“一种拖拉机挡位监测机构以及拖拉机”(zl202222518192)在拨叉轴的末端固结了一个销轴拨动挡位传感器,能够获得拨叉轴的位移量,但该技术方案的智能化、物联网化不足。拖拉机作业过程中,amt变速箱换挡动作较为频繁,电位器式挡位传感器内部的电阻带存在持续的摩擦,也存在测量精度逐渐下降的缺陷。
技术实现思路
1、为了克服现有拖拉机变速箱挡位监测装置的缺陷,本发明为拖拉机梭式换挡变速箱提供了一种电感非接触式的挡位监测装置。电感非接触式的挡位监测装置不仅可以连续测量拨叉轴的位移,而且非接触方案,可极大地延长传感器的使用寿命。
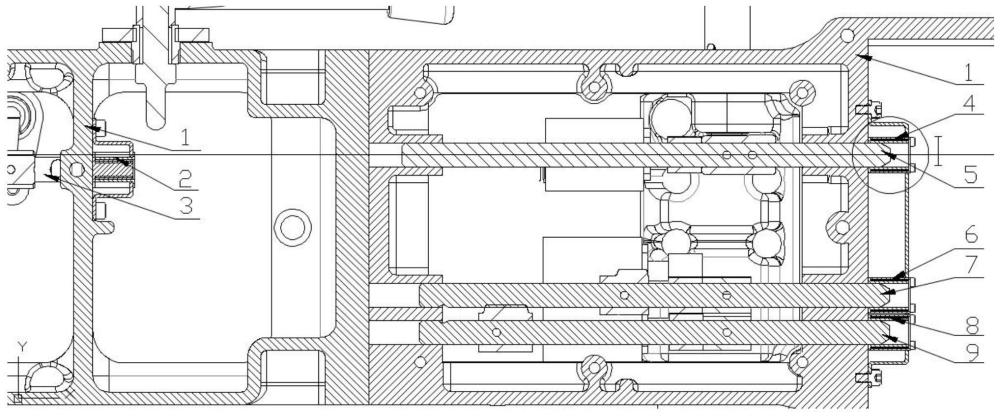
2、本发明解决其技术问题所采用的技术方案是:在梭式换挡变速箱的一二挡拨叉轴、三四挡拨叉轴、高低挡拨叉轴、进退挡拨叉轴的一端的箱体侧壁上,用挡位电极支架分别固定电感式位移电极,当上述挡位处于空挡时,拨叉轴插入于电感骨架的内孔中,插入深度为电感骨架的总长度的一半;当挡位处于任一运动挡位时,拨叉轴要么处于电感骨架内孔的边缘,要么充满电感骨架的内孔。铝质的磁隔离套包裹在副线圈的外侧,防止电感式位移电极之间相互的干扰,或受外部磁信号的干扰。
3、变速箱控制器tcu产生正弦激励信号,输入到每一只电感式位移电极的原线圈,每一只副线圈因互感作用独立输出正弦电压信号,它输入到运算放大器的同相输入端,两只电阻和运算放大器的反相输入端组成负反馈信号放大电路;放大后的信号通过二极管与电容的串联电路,实现交流信号转为直流信号的目的,此直流信号通过由电阻、电容、运算放大器构成的二阶滤波器,滤除干扰信号的直流信号输入到单片机u3的adc信号输入端口。
4、tcu内的cpu上电后,在初始化阶段建立adc的端口对象:ad1、ad2、ad3、ad4,分别采集一二挡拨叉轴、三四挡拨叉轴、高低挡拨叉轴、进退挡拨叉轴的位移量,构建网络客户端,并连接到网络,构建mqtt客户端,构建定时间t0,定时时长为60s,采用循环执行模式。此后程序按照循环扫描的方式运行:当t0定时时间到时,启动a/d变换,读出ad1-ad4的数值,转换成挡位量,然后向mqtt服务器发布各挡位的状态;当发生换挡动作时,构建换挡监测用临时定时器t1,定时时长为10ms,单次执行模式;当t1定时时间到时,启动a/d变换,读出ad1-ad4的数值,转换为距离目标挡位的行程,如果属于同一拨叉轴之间的挡位切换,则当距离目标挡位小于5%行程时,关闭本路电磁阀,由剩余压力推动拨叉轴到目标挡位,使得啮合套之间完全啮合但没有啮合冲击;如果属于不同拨叉轴之间的挡位切换,则当距离空挡位小于10%行程时,关闭本路电磁阀,由剩余压力推动拨叉轴到空挡位,保障准确地停在空挡挡位;如果距离目标挡位的行程还没有达到上述区间内,则再次构建临时定时器t1,定时时长为10ms,单次执行模式,在下次定时器t1被触发时执行行程监测,或执行挡位切换控制的动作。
5、本发明的有益效果是不仅为拖拉机梭式换挡变速箱提供了一种非接触式的挡位监测装置,通过mqtt方式发布挡位状态,而且该装置在换挡过程中能测量拨叉轴的行程,为拨叉轴准确地停止在空挡提供了条件。
技术特征:
1.一种拖拉机梭式换挡变速箱的挡位监测装置,其特征在于:在梭式换挡变速箱的一二挡拨叉轴、三四挡拨叉轴、高低挡拨叉轴、进退挡拨叉轴的一端的箱体侧壁上,用挡位电极支架分别固定电感式位移电极,当上述挡位处于空挡时,拨叉轴插入于电感骨架的内孔中,插入深度为电感骨架的总长度的一半;当挡位处于任一运动挡位时,拨叉轴要么处于电感骨架内孔的边缘,要么充满电感骨架的内孔;铝质的磁隔离套包裹在副线圈的外侧,防止电感式位移电极之间相互的干扰,或受外部磁信号的干扰。
2.按照权利要求1所述的拖拉机梭式换挡变速箱的挡位监测装置,其特征是:变速箱控制器tcu产生正弦激励信号,输入到每一只电感式位移电极的原线圈,每一只副线圈因互感作用独立输出的正弦电压信号被运算放大器电路放大后,通过二极管与电容的串联电路实现交转直的目的,再通过运算放大器滤波电路后,输入到tcu的adc信号输入端口。
3.按照权利要求1所述的拖拉机梭式换挡变速箱的挡位监测装置,其特征是:tcu内的cpu上电后,在初始化阶段建立adc的端口对象:ad1、ad2、ad3、ad4,分别采集一二挡拨叉轴、三四挡拨叉轴、高低挡拨叉轴、进退挡拨叉轴的位移量,构建网络客户端,并连接到网络,构建mqtt客户端,构建定时间t0,定时时长为60s,采用循环执行模式;程序按照循环扫描的方式运行:当t0定时时间到时,启动a/d变换,读出ad1-ad4的数值,转换成挡位量,然后向mqtt服务器发布各挡位的状态;当发生换挡动作时,构建换挡监测用临时定时器t1,定时时长为10ms,单次执行模式;当t1定时时间到时,启动a/d变换,读出ad1-ad4的数值,转换为距离目标挡位的行程,如果属于同一拨叉轴之间的挡位切换,则当距离目标挡位小于5%行程时,关闭本路电磁阀,由剩余压力推动拨叉轴到目标挡位,使得啮合套之间完全啮合但没有啮合冲击;如果属于不同拨叉轴之间的挡位切换,则当距离空挡位小于10%行程时,关闭本路电磁阀,由剩余压力推动拨叉轴到空挡位,保障准确地停在空挡挡位;如果距离目标挡位的行程还没有达到上述区间内,则再次构建临时定时器t1,定时时长为10ms,单次执行模式,在下次定时器t1被触发时执行行程监测,或执行挡位切换控制的动作。
技术总结
一种拖拉机梭式换挡变速箱的挡位监测装置,在挡位拨叉轴的一端的箱体侧壁上固定电感式位移电极,拨叉轴插入电感骨架的内孔中;变速箱控制器TCU产生正弦激励信号,输入到电感式位移电极的原线圈,副线圈因互感作用输出正弦电压信号,在被运算放大器电路放大后,通过二极管与电容的串联电路实现交转直的目的,再通过运算放大器滤波电路后,输入到ADC信号输入端口。TCU内的CPU构建MQTT客户端、定时间T0和AD1‑AD4对象,定时读出AD1‑AD4的数值,向MQTT服务器发布各挡位的状态;当发生换挡动作时,构建临时定时器T1,监测拨叉轴的位移与行程,适量提前关闭电磁阀,使得拨叉轴准确地停在空挡挡位。本装置实现了拨叉轴的挡位监测、位移监测,为电液控制AMT换挡过程中拨叉轴空挡停止提供了条件。
技术研发人员:张方明,张本领,王双坚,庞朝祥,胡洪富
受保护的技术使用者:浙大宁波理工学院
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!