一种混合动力车辆离合器安全控制方法
本发明涉混联式混合动力车辆,特别是涉及一种混合动力车辆离合器安全控制方法。
背景技术:
1、针对没有变速箱的混联式混合动力车辆,第一电机1和发动机集成在一起,主要功能是起动发动机,而第二电机2用于车辆的纯电驱动。在这种情况下,如果需要仅用第一电机1启动发动机,或者仅依靠第二电机2驱动车辆,就必须控制离合器实现两者的分离。因此,为了监控离合器的状态,确保其能够及时分离或结合,系统需要配备相应的传感器来检测和判断离合器的工作状态。当前,许多车辆并未装配有用于监测离合器分离与接合状态的传感器,并且缺乏相应的安全保护控制策略,这可能会导致车辆出现严重故障或频繁出现故障;增加传感器会提高系统的精确度,但也会使系统结构更复杂且增加成本。
2、以上背景技术内容的公开仅用于辅助理解本发明的构思及技术方案,其并不必然属于本专利申请的现有技术,在没有明确的证据表明上述内容在本专利申请的申请日已经公开的情况下,上述背景技术不应当用于评价本申请的新颖性和创造性。
技术实现思路
1、本发明目的在于提出一种通过比较第一电机和第二电机的转速即可监控离合器的状态,不需要增加传感器,减少成本投入,简化控制策略的混合动力车辆离合器安全控制方法。
2、为此,本发明提出一种混合动力车辆离合器安全控制方法。
3、优选地,本发明还可以具有如下技术特征:
4、一种混合动力车辆离合器安全控制方法,包括如下步骤:
5、s101、获取第一电机和第二电机的转速,比较第一电机的转速与第二电机的转速,得到转速比较值;
6、s102、判断车辆所处状态,根据车辆的不同状态,通过所述转速比较值判断离合器的状态;
7、当车辆处于静止状态时,利用第一电机起动发动机,然后获取第二电机的转速,再通过实时转速比较值判断离合器状态;
8、当车辆从静止状态起步,通过第二电机2驱动车辆(发动机为熄火状态)时,获取第一电机的转速,再通过实时转速比较值判断离合器状态。
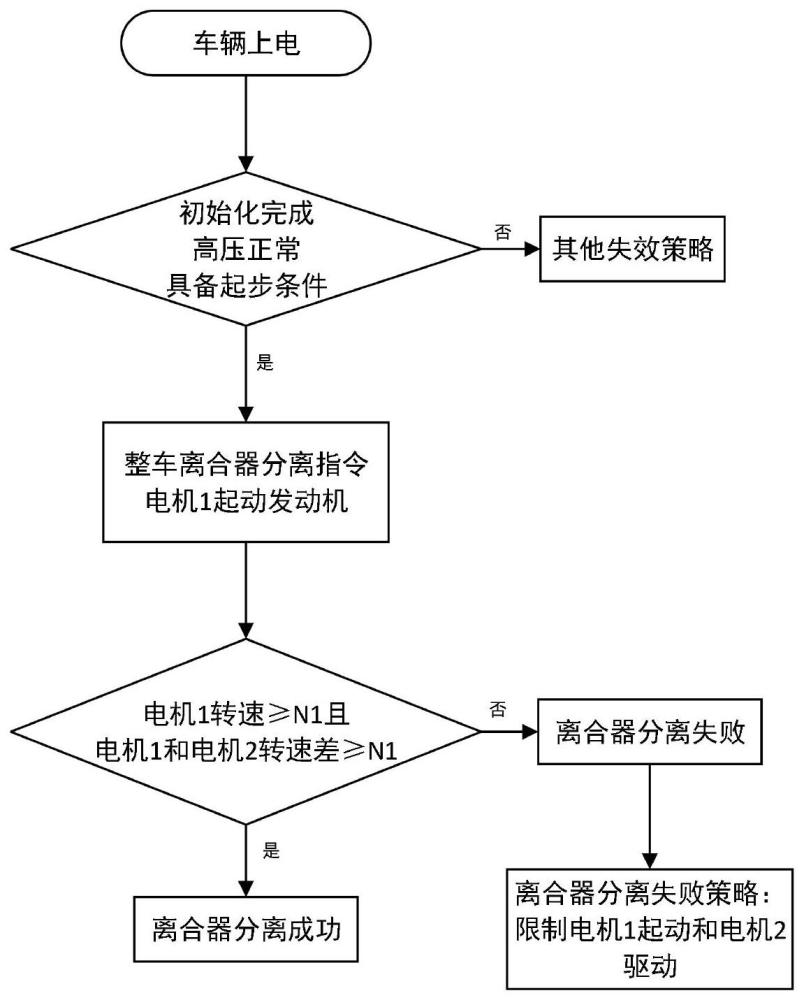
9、进一步地,步骤s2中,在车辆处于静止状态时,通过整车发送离合器分离指令,离合器执行分离动作指令;第一电机以小扭矩启动发动机,通过比较第一电机的转速和电机的转速来判断离合器的状态。
10、进一步地,车辆处于静止时,离合器状态的判断方法:包括,预设一个转速值n1,如果第一电机的转速≥n1,且第一电机和第二电机的转速差≥n1时,则判断离合器成功分离;如果第一电机和第二电机转速差<n1,则判断离合器分离失败,并执行分离失效策略,限制第一电机启动发动机和第二电机2驱动车辆行走。
11、进一步地,转速值n1的值为8~12rpm。
12、进一步地,在车辆从静止状态起步时,整车发送离合器分离指令,离合器执行分离动作指令;通过第二电机驱动车辆起步,并通过比较第一电机的转速和第二电机的转速来判断离合器的状态。
13、进一步地,车辆从静止状态起步时,离合器状态的判断方法:包括,预设一个转速值n2,如果第二电机的转速≥n2,且第一电机转速<n2,则判断为离合器分离成功;若第一电机转速≥n2,则判断为离合器分离失败,执行分离失效策略,限制第一电机的启动和第二电机的驱动。
14、进一步地,转速值n2的值为40~60rpm。
15、本发明与现有技术对比的有益效果包括:通过比较第一电机和第二电机的转速即可监控离合器的状态,不需要增加传感器,减少成本投入,还能够简化控制策略。
技术特征:
1.一种混合动力车辆离合器安全控制方法,其特征在于:包括如下步骤:
2.如权利要求1所述的一种混合动力车辆离合器安全控制方法,其特征在于:步骤s2中,在车辆处于静止状态时,通过整车发送离合器分离指令,离合器执行分离动作指令;第一电机以小扭矩启动发动机,通过比较第一电机的转速和电机的转速来判断离合器的状态。
3.如权利要求2所述的一种混合动力车辆离合器安全控制方法,其特征在于:车辆处于静止时,离合器状态的判断方法:包括,预设一个转速值n1,如果第一电机的转速≥n1,且第一电机和第二电机的转速差≥n1时,则判断离合器成功分离;如果第一电机和第二电机转速差<n1,则判断离合器分离失败,并执行分离失效策略,限制第一电机启动发动机和第二电机驱动车辆行走。
4.如权利要求3所述的一种混合动力车辆离合器安全控制方法,其特征在于:转速值n1的值为8~12rpm。
5.如权利要求1所述的一种混合动力车辆离合器安全控制方法,其特征在于:在车辆从静止状态起步时,整车发送离合器分离指令,离合器执行分离动作指令;通过第二电机驱动车辆起步,并通过比较第一电机的转速和第二电机的转速来判断离合器的状态。
6.如权利要求5所述的一种混合动力车辆离合器安全控制方法,其特征在于:车辆从静止状态起步时,离合器状态的判断方法:包括,预设一个转速值n2,如果第二电机的转速≥n2,且第一电机转速<n2,则判断为离合器分离成功;若第一电机转速≥n2,则判断为离合器分离失败,执行分离失效策略,限制第一电机的启动和第二电机的驱动。
7.如权利要求6所述的一种混合动力车辆离合器安全控制方法,其特征在于:转速值n2的值为40~60rpm。
技术总结
本发明公开了一种混合动力车辆离合器安全控制方法,包括如下步骤:S101、获取第一电机和第二电机的转速,比较第一电机的转速与第二电机的转速,得到转速比较值;S102、判断车辆所处状态,根据车辆的不同状态,通过所述转速比较值判断离合器的状态。本发明具有通过比较第一电机和第二电机的转速即可监控离合器的状态,不需要增加传感器,减少成本投入,简化控制策略。
技术研发人员:梁郑岳,黄治衡,孔泽慧,唐若茹,庞钰玺,李宁,张玉琴,韦仁,蓝梦莹
受保护的技术使用者:广西机电职业技术学院
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!