用于车辆自动加燃料的机器人系统的制作方法
本公开涉及用于自动操作燃料站为车辆加燃料的机器人加燃料系统和方法。
背景技术:
1、未来的移动性给人们从a点到b点的出行方式带来了许多变化,并创造了新的个人移动生态系统。大城市的城市规划正在推进,高科技公司开始涉足汽车生产,一些参与者已经展示了无需备用驾驶员的无人驾驶汽车,汽车共享服务正在全球蔓延。
2、由于技术朝着环保、一体化、自动化和个性化旅行的方向发展,因此迫切需要围绕未来的移动性做好技术准备,例如为车辆加燃料的技术。
3、目前,常见的加燃料方式是使用传统的加油站,需要手动加燃料系统。在有人值守或无人值守的加油站进行这种手动加燃料作业的缺点之一是需要驾驶员的关注或直接参与。因此,这种加燃料时的人机交互与未来的移动性不相适应。
4、当今传统加油站的另一个缺点是,当加燃料时(例如当抓住燃料枪或燃料分配单元时),存在传播细菌和病毒的高风险,因为每天有数百人使用相同的燃料枪。加油站中的自动加燃料操作不仅为未来的移动性做准备,还在一些情况下(例如在疫情的情况下)帮助社会发挥关键作用。
5、在加燃料操作过程中,最小化人机交互的另一种方法是采用工业机械臂。大型公司已经在各个领域的工业生产中使用自动驾驶运输机器人。这些机器人通常都很强大;因此安全问题一直是一个极为重要的问题。因此,工业机器人配备有外部安全系统,该外部安全系统包括用于监控机器人操纵器的运动同时保持与诸如工人的对象的距离的传感器。
6、外部安全系统的一个缺点是工业机器人所进行的操作可能由于外部因素如灰尘、雨或雪而中止,从而限制了工业机器人的使用。因此,非常需要一种在提供安全处理的同时自动平稳地给车辆加燃料的技术解决方案。
技术实现思路
1、本公开涉及用于自动操作给车辆加燃料的操作的机器人加燃料系统。利用本公开,驾驶员从加燃料任务中解脱出来,并被给予更多的自由。本公开的机器人加燃料系统不仅有助于解决疫情内容的问题,而且提供了具有完全自动化的增强型加燃料系统。这种自动化符合未来的移动性,并消除了车辆加燃料过程中的人机交互或参与。此外,所公开的系统满足安全要求,而不需要外部安全系统。
2、因此,本公开的目的是获得一种用于给车辆加燃料的全自动系统。然而,这种自动化通常需要先进的机械臂,这带来了严格的安全要求和外部安全系统。
3、本公开的另一个目的是提供一种系统,其中简化了操作加燃料过程的方式。
4、本公开的另一个目的是提供一种系统,该系统被配置为向车辆提供预定的能源或燃料类型,其中该能源选自多种能源。
5、本公开的又一个目的是通过满足安全要求的系统来操作(即启动、监控和完成)加燃料过程,从而不需要外部安全系统。
6、因此,在第一方面,本公开涉及一种机器人加燃料系统,用于自动操作燃料站为车辆加燃料,包括:
7、-第一检测单元,用于识别车辆,
8、-机械臂,
9、-与机械臂连接的适配器工具,
10、其中该系统被配置为
11、ο检测和识别车辆,并且
12、ο控制机械臂和适配器工具,以与燃料站的至少一个燃料分配单元接合并给车辆加燃料。
13、总的来说,本发明涉及一种用于自动给车辆(主要是汽车)加燃料的加燃料系统。当前公开的加燃料系统采用第一检测单元、机械臂和与机械臂相关联的适配器工具。
14、优选地,该系统的特征在于,检测单元包括一个或多个光学传感器,以检测车辆、检查车辆的方位并识别车辆的规格,例如燃料门或燃料箱封盖的位置以及车辆消耗的燃料类型。
15、此外,第二检测单元可以被配置为识别车辆车轮的定位,其中第一和第二检测单元可以是相同的。该系统还可以包括通信单元,该通信单元被配置为处理由检测单元提供的信号,并且向机械臂提供关于燃料门相对于位于燃料岛上的所识别的燃料类型的燃料分配单元的相对位置的信息。
16、当前公开的系统的优点在于,该系统可以适用于各种类型的燃料源,例如柴油、电力、天然气或氢气。因此,该系统被配置为自动向车辆提供车辆使用的能源。该系统还可以被配置为用于将适配器工具与所识别的燃料类型的燃料分配器接合,可选地用于将燃料门从初始状态打开到打开状态,其中燃料口准备好用于燃料进入,用于将燃料分配器提供给车辆的燃料口,以及用于启动燃料分配器以便将燃料提供给车辆。当加燃料完成时,适配器工具可以将燃料分配单元定位在燃料岛上。此外,适配器工具可以被配置为将车辆的燃料门设置到燃料门的初始状态。
17、当前公开的系统的另一个优点是,机械臂可以是一种可以在人类之间工作的类型,例如协作机器人或cobot或cobot臂。优选地,机械臂可以被配置为使得机械臂可以满足在与人类非常接近的情况下操作的安全要求,并且提供完全自动化的加燃料操作。因此,该系统可以避免由于外部因素导致的意外停止,同时安全和连续地操作该系统。协作机器人或cobot可以是本发明的非必要特征。在本申请中,任何包括机械臂的实施例都可以改为包括cobot臂。
18、术语“cobot”应该被理解为协作机器人,正如在本领域中所理解的共享空间内直接的人机交互,或者在人类和机器人非常接近的地方,cobot的安全性可能依赖于轻质结构材料、圆形边缘以及速度和力的固有限制,或者依赖于力传感器等传感器和确保安全行为的软件。可替换地或附加地,术语“cobot”应该被理解为没有外部安全系统的机器人,其中外部安全系统应该被理解为监控周围环境以发现要避开的外部对象和/或防止人类接近机器人的围栏的系统。
19、当前公开的系统的另一个优点是,该系统附加到现有的分配器上,并且在加燃料之前、加燃料过程中和/或加燃料之后不需要任何改动或人工干预。这预见了当前公开的机器人加燃料解决方案的发明可以集成在现有的燃料岛中,例如在加油站的燃料岛中。所公开的发明的一个重要优点是,该系统还可以集成到其他位置,例如停车场、汽车餐厅、街道、停车场或任何其他可以获得能源和能源分配器的位置。
20、有利的是,该系统可以还被配置为用于处理支付。这进一步预见到,该系统可以适用于自动驾驶车辆。此外,该系统可以与车辆通信,并在车辆可以驶离时向车辆发出指令。
21、在第二方面,本发明涉及一种用于自动给车辆加燃料的方法,包括以下步骤
22、-提供用于识别车辆的第一检测单元,
23、-提供与适配器工具连接的机械臂,
24、-将适配器工具与至少一个燃料分配单元接合,
25、-通过控制机械臂和适配器工具将燃料分配单元与车辆的加燃料口接合来给车辆加燃料。
26、此外,当前公开的方法可以被配置为执行本文描述的系统。
技术特征:
1.一种机器人加燃料系统,用于自动操作燃料站为车辆加燃料,包括:
2.根据前述权利要求中任一项所述的系统,其中,所述机械臂被配置为在没有单独的外部安全系统的情况下操作。
3.根据前述权利要求中任一项所述的系统,其中,所述协作机械臂被加压,以保持预定的压力水平。
4.根据前述权利要求中任一项所述的系统,其中,所述协作机械臂包括围绕所述协作机械臂的至少一部分的套筒。
5.根据前述权利要求中任一项所述的系统,其中,所述适配器工具包括连接器,所述连接器被配置为连接到所述燃料分配单元。
6.根据前述权利要求中任一项所述的系统,其中,所述适配器工具还包括燃料门操作装置,所述燃料门操作装置被配置为与所述车辆的燃料门接合。
7.根据前述权利要求中任一项所述的系统,其中,所述系统被配置为根据所述燃料分配单元来监控和传送所述车辆的定位。
8.根据前述权利要求中任一项所述的系统,其中,所述系统还包括第二检测单元,所述第二检测单元被配置为识别所述车辆的车轮,从而确定所述车辆的定位。
9.根据前述权利要求中任一项所述的系统,其中,所述系统被配置为捕捉所述车辆的至少后轮和/或前轮的图像,以确定所述车辆的位置。
10.根据权利要求9所述的系统,其中,所述系统被配置为基于通过所述第二检测单元的捕捉图像来定位所述车辆的所述燃料门。
11.根据前述权利要求中任一项所述的系统,其中,所述系统还包括旋转和/或滑动的工作台,所述工作台被配置为承载所述协作机械臂。
12.根据权利要求11所述的系统,其中,所述工作台被配置为旋转至少180°。
13.根据权利要求11-12中任一项所述的系统,其中,所述协作机械臂相对于所述工作台的法线以10°-80°之间的角度、优选20°-70°之间的角度、更优选30°-60°之间的角度、最优选45°的角度连接到所述工作台。
14.根据权利要求11-13中任一项所述的系统,其中,所述协作机械臂与所述工作台偏移地接合。
15.根据权利要求14所述的系统,其中,所述偏移为至少25毫米、优选至少50毫米、优选至少75毫米、更优选100毫米、最优选150毫米。
16.根据前述权利要求中任一项所述的系统,其中,所述系统适用于常规燃料,例如汽油、柴油,或者非常规燃料,例如氢、电。
17.根据前述权利要求中任一项所述的系统,还包括加压系统。
18.根据权利要求17所述的系统,其中,所述加压系统被配置为对所述协作机械臂和/或所述适配器工具和/或诸如相机的检测单元加压,并且可选地用于保持高于大气压的预定压力水平。
19.根据权利要求18所述的系统,其中,所述预定压力水平比大气压高至少0.8毫巴、优选在0.8毫巴-15毫巴之间、更优选在1毫巴-10毫巴之间、最优选在2毫巴-5毫巴之间,或者所述预定压力水平比大气压高至少2毫巴。
20.根据权利要求17-19中任一项所述的系统,其中,如果所述系统被关闭,则所述加压系统可以被配置为在自动加燃料操作之前,吹扫所述协作机械臂和/或所述适配器工具和/或检测单元。
21.根据权利要求20所述的系统,其中,吹扫量在50-100升之间。
22.根据权利要求17-21中任一项所述的系统,其中,气体是空气。
23.根据权利要求1-22中任一项所述的机器人加燃料系统的用于给车辆加燃料的用途。
24.一种用于自动给车辆加燃料的方法,包括以下步骤:
25.一种用于自动给车辆加燃料的方法,其中,所述方法包括提供如权利要求1-22中任一项所述的系统的步骤。
26.一种协作机械臂,用于爆炸性环境中,其中,所述协作机械臂包括电子器件和加压系统,所述电子器件包含在具有一个或多个开口的一个或多个外壳中,所述加压系统被配置为用高于大气压的预定压力水平的气体对所述外壳加压。
27.根据权利要求26所述的协作机械臂,其中,所述预定压力水平比大气压高至少0.8毫巴、优选在0.8毫巴-15毫巴之间、更优选在1毫巴-10毫巴之间、最优选在2毫巴-5毫巴之间,或者所述预定压力水平比大气压高至少2毫巴。
28.根据权利要求26-27所述的协作机械臂,其中,所述加压系统被配置为在所述协作机械臂的电子器件被重新启动之前,通过所述气体的预定吹扫量来吹扫所述协作机械臂。
29.根据权利要求28所述的协作机械臂,其中,所述吹扫量在10-200升之间、优选20-150升、更优选30-100升、最优选50-90升之间。
30.根据权利要求26-29所述的协作机械臂,其中,所述气体是空气。
技术总结
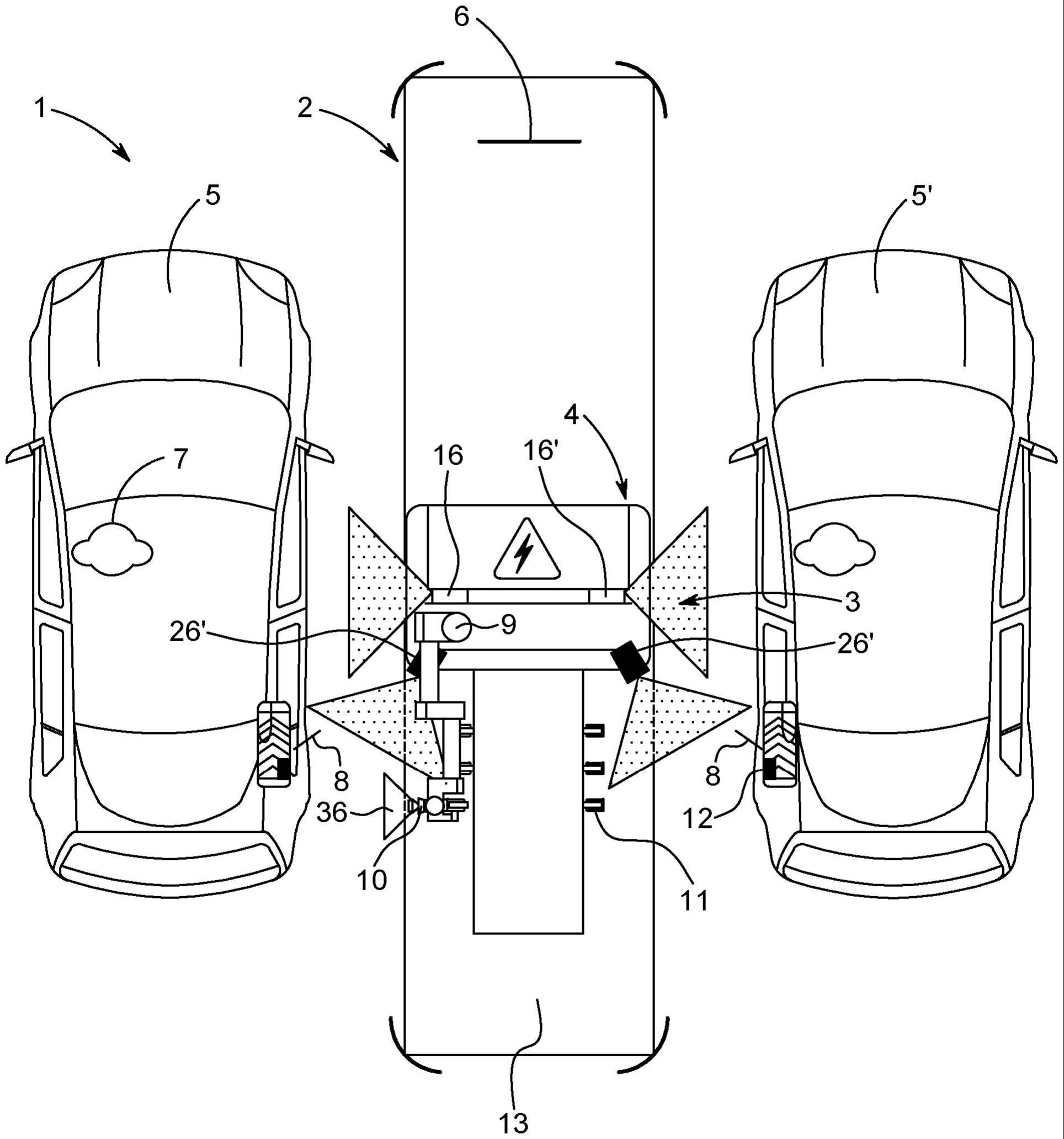
本公开涉及用于自动操作燃料站(1)为车辆加燃料的机器人加燃料系统和方法。机器人加燃料系统包括用于识别车辆(5)的第一检测单元(16)、协作机械臂(9)和与协作机械臂(9)连接的适配器工具(10)。该系统被配置为检测和识别车辆(5),并控制协作机械臂(9)和适配器工具(10)以与燃料站(1)的至少一个燃料分配单元(11)接合并给车辆(5)加燃料。
技术研发人员:J·S·福格拉尔,E·梅耶林克,E·冯布赫瓦尔德,J·T·奥尔森
受保护的技术使用者:奥特福尔有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!