自动充气装置的制作方法
1.本技术涉及气瓶充气的领域,尤其是涉及一种自动充气装置。
背景技术:
2.球形充气罐是公称工作压力等于或大于8mpa的球形充气罐,球形充气罐向外充气时,球形充气罐内的气体温度降低,内能减小,反之向内充气时,内能增大,球形充气罐内的气体温度也会升高。
3.目前球形充气罐充气前需要将球形充气罐上的气瓶嘴螺纹连接在充气设备的充气嘴上,然后开始充气,充气时气压为75-78mpa,并在充气结束后通过人工将气瓶嘴与充气嘴分离。
4.针对上述现有技术,发明人认为:在通过现有设备将充气嘴与气瓶嘴螺纹连接的过程中,气瓶嘴与充气嘴之间经“接近-抵接-抵紧-相对转动-锁紧”后连接,在气瓶嘴与充气嘴之间“抵接-抵紧-相对转动-锁紧”的过程中,气瓶嘴与充气嘴之间的相互作用力来自设备对充气嘴施加的压力,即需要操作人员通过经验控制充气嘴相对于气瓶嘴的进给量,容易因充气嘴的进给量过大导致充气嘴或气瓶嘴受力过大损坏,或因进给量过小导致充气嘴与气瓶嘴之间的螺纹连接受阻,甚至损伤螺纹导致漏气。
技术实现要素:
5.为了控制充气嘴的进给量处于合理范围内,本技术提供一种自动充气装置。
6.本技术提供的一种自动充气装置,采用如下的技术方案:一种自动充气装置,包括充气嘴和支撑基础,其特征在于:还包括转动组件、移动组件以及补偿组件;移动组件固定连接于支撑基础上并用于带动转动组件相对于支撑基础移动,移动组件至少包括与转动组件固定连接的移动输出端以及用于驱动移动输出端移动的移动动力源;转动组件固定连接于支撑基础上并用于带动补偿组件相对于支撑基础定轴转动,转动组件至少包括与补偿组件固定连接的转动输出端以及用于驱动转动输出端定轴转动的转动动力源;补偿组件至少包括与转动输出端固定连接的固定体以及与固定体滑动连接的移动体,移动体与固定体周向卡接,充气嘴与移动体固定连接,移动体的滑移方向沿转动转动组件的滑移方向设置。
7.通过采用上述技术方案,启动移动动力源,使移动动力源通过移动输出端带动转动组件向充气位置处移动,在球形充气罐接近充气嘴且二者接近抵接时,通过启动转动组件使转动输出端定轴转动来驱动充气嘴定轴转动,在球形充气罐与充气嘴不断接近直至抵接后,移动体会受力向固定体方向移动,使得充气嘴产生相对于球形充气罐的位移,即在球形充气罐与充气嘴的连接过程中,补偿组件能够通过带动充气嘴相对于球形充气罐滑移,实现对充气嘴与球形充气罐螺纹连接时要求的行程进行补偿,使得充气嘴与球形充气罐能够稳定有效的螺纹连接,实现球形充气罐与充气嘴之间的连接,并在完成连接后开始对球形充气罐进行充气。
8.可选的,所述移动组件还包括与移动输出端转动连接的上转动体,所述转动组件还包括与转动输出端固定连接的下转动体,上转动体的转动轴线与下转动体的转动轴线共线,上转动体与下转动体之间设有将二者固定连接的缓冲件。
9.通过采用上述技术方案,通过缓冲件、上转动体以及下转动体将移动组件和转动组件连接,能够减小转动组件传递给移动组件的扭力,即减小充气嘴与球形充气罐对接时产生的相互作用力对移动组件上移动输出端姿态的影响,使得被移动组件控制位置的充气嘴能够稳定精确的移动至目标位置,提高了使用稳定性。
10.缓冲件的作用是减小在充气嘴与球形充气罐已经抵接甚至连接稳定后,由于误操作或其他失误导致移动组件继续工作,使得充气嘴与球形充气罐之间的抵紧力增大,以至于充气嘴和/或球形充气罐损坏的可能。缓冲件能够将滑动组件与气嘴转动机构连接,又能够减小充气嘴与球形充气罐之间相互作用力过强导致部件损坏的可能。
11.可选的,所述缓冲件包括两端分别与上转动体以及下转动体固定连接的缓冲弹簧。
12.通过采用上述技术方案,缓冲弹簧结构简单,来源广泛,便于维护,能够起到连接和缓冲的效果。
13.可选的,所述移动组件还包括移动台,上转动体通过轴承与移动台转动连接,上转动体上同轴固定连接有防脱盘,移动台上开设有与防脱盘形状适配的沉槽,防脱盘悬置于沉槽内,移动台与移动输出端固定连接。
14.通过采用上述技术方案,由于上转动体通过轴承与移动台转动连接,所以轴承承受了来自上转动体、缓冲件、转动组件以及充气嘴的重力,防脱盘和沉槽的设置能够在轴承受损,上述结构不再被支撑时起到防护效果,通过防脱盘的边缘支撑在沉槽的底面上,减小上述结构直接掉落导致损坏的可能。
15.可选的,所述移动组件还包括螺纹连接在支撑基础上的丝杆,动力源用于驱动丝杆定轴转动,丝杆的一端与转动组件固定连接。
16.通过采用上述技术方案,丝杆定轴转动实现移动,进而通过转动组件带动充气嘴移动,过程稳定,精度高。
17.可选的,所述丝杆端部固定连接有抗弯接头,抗弯接头包括两个互相铰接的连接器,两个连接器分别与丝杆以及转动组件固定连接,连接器的转动轴线垂直于丝杆的滑移方向设置。
18.通过采用上述技术方案,由于丝杆的螺纹连接存在装配间隙,所以移动组件在移动过程中仍可能会存在水平方向上的偏移。抗弯接头减小了移动组件在移动过程中产生水平方向偏移时将力传递到丝杆上的可能,减小了丝杆受到径向力导致弯曲,以至于丝杆转动相同圈数后充气嘴不能够移动至目标位置,导致充气嘴与球形充气罐之间连接程度低甚至无法连接的可能。
19.可选的,所述固定体上固定连接有用于顶出所述移动体的补偿补偿弹性件。
20.通过采用上述技术方案,通过补偿补偿弹性件可压缩和伸长(恢复)的特性,能够在球形充气罐与充气嘴抵接后驱动移动组件继续移动,以此来压缩补偿补偿弹性件。在补偿补偿弹性件被压缩后,通过转动的形式将充气嘴与球形充气罐连接时,补偿补偿弹性件会将充气嘴与球形充气罐抵紧在一起,同时随充气嘴与球形充气罐之间螺纹连接程度的增
强,弹簧开始伸长(恢复),为充气嘴与球形充气罐之间的螺纹连接提供了行程。故补偿补偿弹性件既能够使充气嘴与球形充气罐能够稳定连接,又减小了通过人工操控移动组件时,由于操作精度要求高导致的可能挤坏充气嘴或球形充气罐的可能,在球形充气罐与充气嘴分离过程中亦是同理。
21.可选的,所述补偿补偿弹性件包括两端分别与移动体以及固定体固定连接的补偿弹簧。
22.通过采用上述技术方案,补偿弹簧结构简单,来源广泛,便于维护,能够提供稳定有效的缓冲和复位效果。
23.可选的,所述移动体上固定连接有用于标记充气嘴位置的指示组件,所述指示组件至少包括一露出于移动体外并用于指示充气嘴水平高度的指示件。
24.通过采用上述技术方案,通过指示件能够确认充气嘴移动过程中的实际位置,即获知补偿补偿弹性件的被压缩量,能够将充气嘴与球形充气罐之间的抵接力变化转化为指示件的位置变化这一可被直接观测的形式,便于操作人员止停移动组件,减小球形充气罐和/或充气嘴位移量过大导致受损的可能。
25.可选的,所述指示件包括固定连接于移动体上的定位板,所述指示组件还包括固定连接于支撑基础上并朝向定位板设置的红外探头。
26.通过采用上述技术方案,通过红外探头射出激光,经定位板反射后被红外探头接收获知定位板与红外探头之间的最短直线距离,即能够更加清楚直接的反映出补偿补偿弹性件的被压缩量,提高了对充气嘴与球形充气罐之间抵接程度把控的精准程度,进一步减小了充气嘴和/或球形充气罐受损的可能。
27.综上所述,本技术包括以下至少一种有益技术效果:1. 启动移动动力源,使移动动力源通过移动输出端带动转动组件向充气位置处移动,在球形充气罐接近充气嘴且二者接近抵接时,通过启动转动组件使转动输出端定轴转动来驱动充气嘴定轴转动,在球形充气罐与充气嘴不断接近直至抵接后,移动体会受力向固定体方向移动,使得充气嘴产生相对于球形充气罐的位移,即在球形充气罐与充气嘴的连接过程中,补偿组件能够通过带动充气嘴相对于球形充气罐滑移,实现对充气嘴与球形充气罐螺纹连接时要求的行程进行补偿,使得充气嘴与球形充气罐能够稳定有效的螺纹连接,实现球形充气罐与充气嘴之间的连接,并在完成连接后开始对球形充气罐进行充气;2. 通过红外探头射出激光,经定位板反射后被红外探头接收获知定位板与红外探头之间的最短直线距离,即能够更加清楚直接的反映出补偿补偿弹性件的被压缩量,提高了对充气嘴与球形充气罐之间抵接程度把控的精准程度,进一步减小了充气嘴和/或球形充气罐受损的可能。
附图说明
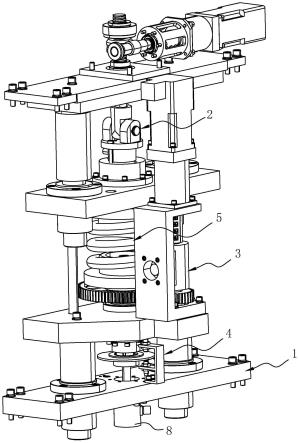
28.图1是一种实施例的示意图。
29.图2是实施例中为表示移动组件位置的示意图。
30.图3是图2中为表示移动组件结构的a部放大图。
31.图4是实施例中为表示防脱盘位置的示意图。
32.图5是实施例中为表示转动组件结构的示意图。
33.图6是图6中为表示补偿组件结构的b部放大图。
34.图7是实施例中为表示固定体与移动体连接关系的示意图。
35.附图标记说明:1、支撑基础;2、移动组件;21、移动动力源;22、移动台;23、上转动体;24、上伸缩杆;25、抗弯接头;26、轴承;27、沉槽;28、防脱盘;29、丝杆;3、转动组件; 31、转动动力源;32、下转动体;33、齿轮组;34、转动台;35、下导向杆;4、指示组件;41、红外探头;42、定位板;5、缓冲件;6、补偿组件;61、固定体;62、移动体;63、补偿弹性件;64、限位杆;65、轨道;66、滑槽;7、限位槽;8、充气嘴。
具体实施方式
36.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在理解本发明的发明构思前提下所获得的其他实施例,都属于本发明保护的范围内。
37.需要说明,若本发明实施例中有涉及方向性指示(诸如上、下、左、右、前、后
……
),则该方向性指示仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
38.为方便理解本技术实施例提供的自动充气装置,首先对其应用场景进行说明。本技术实施例中记载的自动充气装置用于球形气罐(气瓶)的充气中。旨在提供一种自动化程度高的充气设备,通过可控的机械结构实现气瓶充气过程中充气设备上的充气嘴(下称充气嘴)与球形充气罐上的气瓶嘴(下称气瓶嘴)对接或分离,减小充气嘴与球形充气罐连接或分离过程中由于相互作用力过强导致受损的可能。
39.本技术实施例公开一种自动充气装置,参见图1和图2,图1是一种实施例的示意图;图2是实施例中为表示移动组件2位置的示意图。自动充气装置包括充气嘴8、支撑基础1、转动组件3、移动组件2以及补偿组件6。
40.支撑基础1用于给上述部件提供安装位置。
41.移动组件2固定连接于支撑基础1上并用于带动转动组件3相对于支撑基础1移动,移动组件2至少包括与转动组件3固定连接的移动输出端以及用于驱动移动输出端移动的移动动力源21;转动组件3固定连接于支撑基础1上并用于带动补偿组件6相对于支撑基础1定轴转动,转动组件3至少包括与补偿组件6固定连接的转动输出端以及用于驱动转动输出端定轴转动的转动动力源 31;补偿组件6至少包括与转动输出端固定连接的固定体61以及与固定体61滑动连接的移动体62,移动体62与固定体61周向卡接,充气嘴8与移动体62固定连接,移动体62的滑移方向沿转动转动组件3的滑移方向设置参见图1和图3,具体的,滑动组件包括移动动力源21、丝杆29、移动台22以及上转动体23。本实施例中的动力源为固定连接在支撑基础1上的气嘴滑动电机,丝杆29竖向设置并螺纹连接在支撑基础1上,气嘴滑动电机有一与丝杆29适配连接的输出端,用于驱动丝杆29定轴转动。丝杆29的底端与移动台22固定连接,上转动体23转动连接在移动台22上。上转动体23上固定连接有缓冲件5,缓冲件5同时与转动组件3固定连接。本实施例中的缓冲件5
为套设并固定连接在上转动体23上的缓释弹簧。
42.移动台22上固定连接将其与支撑基础1连接的上伸缩杆24,使得移动台22能够在丝杆29定轴转动的前提下相对于支撑基础1在竖向移动,进而使得移动台22通过缓冲件5带动转动组件3在竖向移动,进而实现充气嘴8在竖向的移动。在充气嘴8与球形充气罐已经抵接甚至连接稳定后,由于误操作或其他失误导致丝杆29继续工作,即移动台22向球形充气罐方向移动时,缓冲件5能够提供移动台22的活动余量,相对于移动台22与转动组件3硬连接的情况,充气嘴8与球形充气罐之间的相互抵接力更小,减小了充气嘴8与球形充气罐之间抵接过大导致受损的可能。
43.参见图3和图4,图4是实施例中为表示防脱盘28位置的示意图。在一个较佳的实施例中,上转动体23通过轴承26转动连接在移动台22上。由于转动组件3需要对充气嘴8施加扭力,驱使充气嘴8与球形充气罐上的气瓶嘴螺纹连接,所以转动组件3会受到扭力,即转动组件3可能会产生周向偏移。通过轴承26将上转动体23与移动台22连接,能够减小转动组件3通过上转动体23传递给滑动组件的扭力,即减小充气嘴8与气瓶嘴对接时产生的相互作用力对丝杆29姿态的影响,减小了丝杆29受力转动导致滑动组件带动转动组件3在竖向移动,最终影响充气嘴8与气瓶嘴连接效果的可能。上转动体23通过轴承26与移动台22转动连接,上转动体23上同轴固定连接有防脱盘28,移动台22上开设有与防脱盘28形状适配的沉槽27,防脱盘28悬置于沉槽27内。
44.继续参见图3,在一个较佳的实施例中,丝杆29底端固定连接有抗弯接头25,本实施例中的抗弯接头25为两铰接在一起的连接器。抗弯接头25的两端分别与丝杆29和移动台22固定连接。由于移动台22通过伸缩杆与支撑基础1连接并实现导向,且伸缩杆存在装配间隙,所以移动台22在移动过程中仍可能会存在水平方向上的偏移。抗弯接头25减小了移动台22移动过程中产生水平方向偏移时将力传递到丝杆29上的可能,减小了丝杆29受到径向力导致弯曲,以至于丝杆29转动相同圈数后移动台22不能带动转动组件3移动至目标位置,导致充气嘴8与气瓶嘴之间连接程度低甚至无法连接的可能。
45.参见图3和图5,转动组件3包括转动台34、下转动体32转动动力源 31以及转动输出端,本实施例中的转动动力源 31为气嘴转动电机,本实施例中的转动输出端为与气嘴转动电机的输出轴适配连接的齿轮组33。
46.参见图5和图6,具体的,转动台34上固定连接有将其与支撑基础1连接的下伸缩杆,下伸缩杆的底端固定连接于支撑基础1上。气嘴转动电机固定连接在转动台34的顶面,且气嘴转动电机的输出轴与齿轮组33适配连接,下转动体32同轴固定连接在齿轮组33中的一个齿轮上,并跟随气嘴转动电机驱动齿轮组33转动而定轴转动。下转动体32的转轴沿竖向贯穿转动台34并与充气嘴8固定连接。通过将缓冲件5的底端同轴套设并固定连接在下转动体32上,能够实现转动组件3与滑动组件之间的连接,即通过滑动组件能够带动转动组件3以及充气嘴8在竖向移动,并通过气嘴转动电机驱动下转动体32,能够实现充气嘴8的定轴转动,最终实现充气嘴8与气瓶嘴的连接或脱离。
47.应理解上述采用电机和齿轮组33的形式驱动下转动体32定轴转动仅为本技术实施例的一种实施方式,其他诸如曲柄连杆、蜗轮蜗杆等驱动形式均在本技术的保护范围内。
48.参见图5和图6,在一个较佳的实施例中,下转动体32的转轴为沿竖向贯穿转动台34的连接轴,连接轴的底端固定连接有补偿组件6。补偿组件6至少包括与转动输出端固定
连接的固定体61以及与固定体61滑动连接的移动体62,移动体62与固定体61周向卡接,充气嘴8与移动体62固定连接,移动体62的滑移方向沿转动转动组件3的滑移方向设置。具体的,连接轴通过轴承26与转动台34转动连接,补偿组件6包括固定连接于充转动组件3上的固定体61、与固定体61滑动连接的移动体62,固定体61与移动体62沿周向卡接,本实施例中的移动体62为一开口朝上的筒状结构,移动体62内部固定连接有补偿弹性件63,补偿弹性件63用于连接移动体62与固定体61,充气嘴8与移动体62固定连接。
49.参见图6和图7,在装配上述部件中,固定体61为一螺栓连接在连接轴底端的套筒,移动体62为一插接在固定体61内的筒体,固定体61将移动体62的内部空腔封闭,补偿弹性件63置于移动体62的空腔内,且补偿弹性件63的两端分别与固定体61以及移动体62固定连接,本实施例中的补偿弹性件63为补偿弹簧,充气嘴8同轴固定连接在移动体62的底端。
50.在充气嘴8与球形充气罐接近并抵接后,补偿组件6的存在能够使得充气嘴8产生相对于滑动组件的位移,即通过补偿弹性件63可压缩和伸长(恢复)的特性,能够通过在球形充气罐与充气嘴8抵接后压缩补偿弹性件63,在补偿弹性件63被压缩后,通过转动的形式将充气嘴8与球形充气罐连接,此时补偿弹性件63会将充气嘴8与球形充气罐抵紧在一起,同时随充气嘴8与球形充气罐之间螺纹连接程度的增强,弹簧开始伸长(恢复),为充气嘴8与球形充气罐之间的螺纹连接提供了行程。补偿弹性件63既能够使充气嘴8与球形充气罐能够稳定连接,又减小了通过人工操控瓶嘴滑动组件和滑动组件时,充气嘴8与气瓶嘴之间相互抵紧力过大导致的可能挤坏充气嘴8或球形充气罐的可能,这在球形充气罐与充气嘴8分离过程中亦是同理。
51.在一个较佳的实施例中,固定体61的内壁上固定连接有多个轨道65,轨道65竖直设置,移动体62的外壁上开设有多个与轨道65适配的滑槽66。轨道65插接在滑槽66内实现固定体61与移动体62之间周向卡接,减小了充气嘴8与气瓶嘴螺纹连接过程中扭力传递给补偿弹性件63导致补偿弹性件63受损甚至失效的可能。
52.在一个较佳的实施例中,移动体62的底端开设有一限位槽7,固定体61上同轴固定连接有限位杆64,限位杆64的底端伸入限位槽7内并呈扩径的凸台状,限位槽7的深度大于限位杆64底端的凸台高度,使得补偿弹性件63失效时凸台与限位槽7之间能够卡住,减小移动体62受自身重力向下掉落并与固定体61脱离的可能。
53.继续参考图6,气嘴转动机构上设有用于标记充气嘴8位置的指示组件4,指示组件4至少包括一露出于气嘴转动机构外并用于指示充气嘴8水平高度的指示件,指示件包括固定连接于气嘴转动机构上的定位板42,指示组件4还包括固设于支撑基础1上并朝向定位板42设置的红外探头41。
54.具体的,定位板42同轴套设并固定连接在移动体62上,红外探头41有两个且通过一支架固定连接在支撑基础1上,定位板42位于两个红外探头41之间。通过定位板42将红外探头41射出的激光反射,并经红外探头41上的传感器接收后获知定位板42相对于两个红外探头41的距离,能够确定充气嘴8的具体位置,进而获知充气嘴8是否达到目标位置,减小了充气嘴8超量位移影响充气的可能。
55.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1