一种用于燃气泄漏监测的防爆巡检无人车及巡检方法与流程
1.本发明属于无人巡检领域,尤其是一种用于燃气泄漏监测的防爆巡检无人车及巡检方法。
背景技术:
2.目前燃气泄漏监测主要采用人工巡检的方式。由巡检员携带燃气检测仪的巡检方式存在工作量大,效率低缺点,且巡检环境复杂,巡检工作具有危险性。巡检无人车是替代人工巡检的一种解决方案。在燃气泄漏监测中应用巡检无人车,其优势在于:巡检无人车可进入各种复杂危险的区域;采用多种传感器对现场进行检查,发现异常时能及时预警,人机交互方便,同时巡检效率高和综合巡检成本低,相比人工巡检有明显的优势。
3.目前,巡检无人车无法自主规划最佳巡检路线和准确定位燃气泄漏点,且智能程度不高,无法适应越来越复杂的巡检任务,充分发挥无人巡检的优势。
技术实现要素:
4.本发明的目的在于解决现有技术中的问题,提供一种用于燃气泄漏监测的防爆巡检无人车及巡检方法,可实现自主规划巡检,智能化程度高,有利于提高巡检效率和降低成本。
5.为达到上述目的,本发明采用以下技术方案予以实现:
6.一种用于燃气泄漏监测的防爆巡检无人车,包括:
7.环境监测传感器模块,用于监测燃气管道运行环境和管道燃气泄漏情况;
8.燃气泄漏定位模块,用于通过检测燃气管道发生泄漏时产生的声波信号来检测燃气泄漏并定位燃气泄漏点;
9.风险评估模块,用于评估燃气管道巡检区域内与燃气泄漏风险相关的因素及相关性,建立系统层次结构,计算区域燃气泄漏的风险系数,再根据各区域燃气泄漏危害情况,评估燃气泄漏后果和损失;
10.自主导航定位模块,通过多源传感器融合,感知周围环境建立精确地图实现自主导航定位,根据规划的巡检路线自主巡检;
11.巡检规划模块,通过计算燃气管道巡检区域的优先级,制定巡检计划,规划最佳巡检路线;
12.监控预警模块,用于记录监测的环境信息并建立数据库,当检测到环境空气指标异常时,定位燃气泄漏点,将预警信息以及现场情况记录报告远程监控台。
13.进一步的,还包括远程交互模块,用于将巡检过程中收集的环境数据及巡检视频上传服务器。
14.进一步的,所述环境监测传感器模块设置有甲烷传感器、温湿度传感器、烟雾传感器、氧气传感器、二氧化碳传感器、一氧化碳传感器、六氟化硫传感器、硫化氢传感器和粉尘传感器。
15.进一步的,所述燃气泄漏定位模块设置有超声波传感器阵列。
16.进一步的,所述自主导航定位模块中的传感器融合模块采用激光雷达、摄像头、rtk和imu进行多源传感器融合。
17.一种所述用于燃气泄漏监测的防爆巡检无人车的巡检方法,包括:
18.超声波传感器阵列对接收到的声波信号进行信噪分离,采用mcsvm智能算法区分现场噪声和燃气泄漏产生的声波信号,结合环境监测模块中的传感器,检测燃气管道气体泄漏并定位燃气泄漏点;
19.根据巡检区域差异进行分区,运用层次分析法分析各区域燃气泄漏风险因素,评估燃气泄漏危害和损失,制定巡检计划,规划巡检路线;
20.多源传感器融合感知周围环境,建立精确地图实现自主导航定位,根据规划的巡检路线自主巡检;
21.巡检过程中监测环境信息并建立数据库,当检测到环境空气指标异常时,定位燃气泄漏点,将预警信息以及现场情况记录报告远程监控台,同时产生声光报警信息;
22.读取在燃气管道沿线及管道内的传感器数据,将巡检视频上传服务器,远程操控完成特殊巡检任务。
23.进一步的,超声波传感器阵列对接收到的声波信号采用vmd变分模态分解和小波阈值去噪算法进行信噪分离:
24.对声波信号进行vmd分解,求解原始波形和各本征模态分量的相关性;
25.保留相关系数较大的分量,对相关系数小于阈值的分量,采用基于最佳母小波的小波阈值去噪算法进行处理;
26.对保留的分量和去噪处理后的模态分量进行重构,实现波形信号的信噪分离。
27.进一步的,定位燃气泄漏点采用基于声波信号峰值检测方法计算超声波传感器阵列信号相对时延:
28.进行声波信号端点检测,对波形时域信号分窗,求窗口内波形信号的平均能量和波动率;
29.计算窗口间平均能量和波动率的增量,当达到预定阈值时,取窗口内第一个波形峰值前的过零点为声波端点,能量和波动阈值采样动态阈值,计算方式为当前窗口前后计算一段时间内波形的平均能量和波动率;
30.在声波持续段中提取波形峰值特征,超声波传感器阵列各信号满足多个特征匹配时,计算波形时延,根据相对时延解算声源位置。
31.进一步的,燃气泄漏风险因素包括环境因素、入侵因素、设计因素和意外因素。
32.进一步的,巡检路线的规划方法为:
33.运用层次分析法分析各燃气泄漏风险因素的联系,建立系统层次结构;
34.构建同层次中各因素之间相对上层因素之间的比较矩阵,计算同一层中各因素的权值;
35.根据燃气管道运行记录,结合管道运行标准进行评定,得出各项因素的指数;
36.根据不同因素对燃气泄漏的相关程度,计算区域燃气泄漏的风险系数;
37.结合区域内发生燃气泄漏造成的事故危害性,得出区域燃气泄漏的危害系数;
38.根据燃气区域危害系数,制定巡检计划,规划巡检路线。
39.与现有技术相比,本发明具有以下有益效果:
40.本发明提供一种用于燃气泄漏监测的防爆巡检无人车的巡检方法,采用多种环境监测传感器和超声波传感器阵列声波定位方式相结合,实现燃气泄漏检测并定位泄漏点,可以降低漏检率;通过评估燃气泄漏风险和危害,制定巡检计划并规划最优巡检路线,结合基于多传感器融合自主定位导航,可以实现自主巡检,无需人工值守;通过远程交互模块及时发布燃气泄漏预警并采取相应的措施,降低了燃气泄漏事故的危害,智能化程度高,有利于提高巡检效率和降低成本,解决了燃气管道人工巡检方式存在工作量大、效率低、漏检等问题,是替代人工巡检的一种有效方式。
附图说明
41.为了更清楚的说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
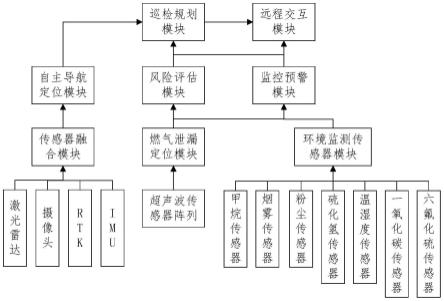
42.图1为本发明的燃气泄漏监测巡检无人车系统结构框图。
43.图2为本发明的燃气泄漏声波定位结构框图。
44.图3为本发明的燃气泄漏风险评估及巡检路径规划结构框图。
具体实施方式
45.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。
46.因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
47.下面结合附图对本发明做进一步详细描述:
48.参见图1,本发明提供一种用于燃气泄漏监测的防爆巡检无人车,包括环境监测传感器模块、燃气泄漏定位模块、自主导航定位模块、风险评估模块、巡检规划模块、监控预警模块和远程交互模块。
49.环境监测传感器模块,用于监测燃气管道运行环境和管道燃气泄漏情况;
50.燃气泄漏定位模块,通过检测燃气管道发生泄漏时产生的声波信号来检测燃气泄漏并定位燃气泄漏点;
51.风险评估模块,用于评估燃气管道巡检区域内与燃气泄漏风险相关的因素及相关性,建立系统层次结构,计算区域燃气泄漏的风险系数,再根据各区域燃气泄漏危害情况,评估燃气泄漏后果和损失;
52.自主导航定位模块,通过多源传感器融合,感知周围环境建立精确地图实现自主导航定位,根据规划的巡检路线自主巡检;
53.巡检规划模块,通过计算燃气管道巡检区域的优先级,制定巡检计划,规划最佳巡检路线;
54.远程交互模块,用于将巡检过程中收集的环境数据及巡检视频上传服务器;
55.监控预警模块,用于记录监测的环境信息并建立数据库,当检测到环境空气指标异常时,定位燃气泄漏点,将预警信息以及现场情况记录报告远程监控台,同时产生声光报警信息。
56.巡检无人车上搭载的环境监测传感器包含甲烷传感器、温湿度传感器、烟雾传感器、氧气传感器、二氧化碳传感器、一氧化碳传感器、六氟化硫传感器、硫化氢传感器、粉尘传感器,可监控燃气管道运行环境的空气指标、管道燃气泄漏类型和泄漏气体浓度等指标,为燃气泄漏点定位和风险评估提供参考。
57.参照图2,巡检无人车的燃气泄漏定位模块装备了超声波传感器阵列,通过识别燃气管道发生泄漏时产生的声波信号来定位燃气泄漏点。首先对超声波传感器阵列监测的声波信号进行信噪分离,再进行泄漏识别,声波时延估计和泄漏点位置解算。
58.声波信号信噪分离首先对声波信号进行vmd分解,得到不同频带的本征模态分量;再求解原始波形和各本征模态分量的相关性;保留相关系数大于0.5的分量,对相关系数小于阈值的分量,采用基于最佳母小波的小波阈值去噪算法进行处理。
59.基于最佳母小波的小波阈值去噪算法,通过分析无泄漏事件和持续泄漏事件的声波时域波形,选择最佳的小波基函数进行小波变换;使用阈值函数对变换后的信号进行处理,去除异常的高频系数;对于阈值函数不连续以及小于阈值的小波系数的去噪效果不理想的问题,采用带指数的阈值估计器,对于小于阈值的小波系数,以调整因子作为阈值估计器的系数。对去噪处理后的模态分量和保留的相关分量进行重构,实现波形信号的信噪分离。
60.采用mcsvm智能算法对预处理后的声波信号进行识别,区分现场干扰信号和燃气泄漏产生的声波信号,结合环境监测模块中高灵敏度的燃气传感器,降低燃气泄漏的误识别率。
61.声波信号经过信噪分离和燃气泄漏信号识别后,采用一种基于声波信号峰值检测方法进行超声波传感器阵列声波时延估计,该方法不需要对声源信号进行傅里叶变换等操作,且计算量较小。
62.声波延时估计首先进行声波信号端点检测,对波形时域信号分窗,窗口间采取1/2重叠,求窗口内波形信号的平均能量和波动率,再计算窗口间平均能量和波动率的增量,当达到预定阈值时,取窗口内第一个波形峰值前的过零点为声波端点,为进一步提高端点检测方法的抗噪能力,能量和波动阈值根据当前窗口前后计算一段时间内波形的平均能量和波动率计算。在使用能量和波动指标识别出声源端点后,信息帧中包含三部分,即环境背景、声波到达阶段和声波持续段,在声波持续过程中提取波形峰值特征,传感器阵列各信号满足多个特征匹配时,计算波形时延,根据相对时延解算声源位置。
63.参照图3,巡检无人车风险评估模块根据巡检区域差异进行分区,通过分析各区域的分析因素,评估燃气泄漏危害和损失,为巡检无人车制动巡检计划和规划巡检路线提供依据。
64.分析与燃气泄漏风险相关的因素,根据各风险因素的特点,可分为四类:环境因
素、入侵因素、设计因素和意外因素。其中环境因素主要考虑燃气管道所在区域的地形结构,土壤指标和空气质量;入侵因素主要考虑人类活动数量及其导致燃油管道的可能性和破坏严重性;设计因素主要考虑燃气管道保护层数量和类型,系统运行年限和容错冗余设计等;意外因素主要考虑运营条件,施工和维护操作。
65.运用层次分析法分析系统中各因素的联系,建立系统层次结构;构建同层次中各因素之间相对上层因素之间的比较矩阵,计算同一层中各因素的权值;根据燃气管道运行记录,结合管道运行标准进行评定,得出每项因素的指数;根据不同因素对燃气泄漏的相关程度,计算区域燃气泄漏的风险系数;再结合区域内发生燃气泄漏造成的事故危害性,得出区域燃气泄漏的危害系数;再根据燃气区域危害系数,制定巡检计划,规划巡检路线。
66.巡检无人车的自主导航定位模块采用激光雷达、摄像头、rtk和imu,通过多源传感器融合,感知周围环境建立精确地图实现自主导航定位,根据规划的巡检路线自主巡检。监控预警模块监测环境信息并建立数据库,当检测到环境空气指标异常时,定位燃气泄漏点,将预警信息以及现场情况记录报告远程监控台,同时产生声光报警信息以提醒现场其他人员。
67.巡检无人车通过无线通信方式读取安装在燃气管道沿线和燃气管道内部的传感器数据,将数据和巡检视频上传服务器,并在需要人工接管时,管理员可通过无人车上的可见光摄像头等传感器返回的信息,远程操控无人车实现特殊巡检任务。
68.本发明的用于燃气泄漏监测的防爆巡检无人车,搭载了多种环境监测传感器,监控燃气管道运行环境和管道燃气泄漏情况;燃气泄漏定位模块装备了超声波传感器阵列,识别燃气泄漏产生的声波,结合环境监测传感器检测泄漏气体浓度,避免燃气泄漏误警,并实现泄漏点定位;风险评估模块分析燃气泄漏风险因素并计算区域燃气泄漏的风险系数,通过巡检规划模块制定巡检计划和规划巡检路线;自主导航定位模块通过多源传感器融合,实现自主导航定位,通过规划的路线实现自主巡检;监测到燃气泄漏后,监控预警模块将预警信息以及现场情况记录报告远程监控台,同时产生声光报警信息以提醒现场其他人员。
69.以上仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1