一种机器人末端执行器及机器人的制作方法
本技术涉及机器人的末端执行器结构,特别是涉及一种机器人末端执行器及机器人。
背景技术:
1、在智能制造设备中,服务机器人是一种应用较为广泛的设备。目前,运用于矿泉水瓶搬运抓取的服务机器人,新增加了开矿泉水瓶瓶盖和拿着矿泉水瓶给杯子倒水,以及倒水后稳定将瓶盖锁上的功能。现有运用于机器人的普通抓手,开水瓶瓶盖时存在打滑打不开的现象,倒水时无法抓稳瓶子,瓶子存在角度倾斜等现象。
2、例如,中国专利cn215433723u公开了一种饮料瓶搬运机器人抓手,通过伺服电机带动第一传动齿轮转动,使第一传动齿轮与第二传动齿轮啮合,从而使第二传动齿轮与间歇齿轮啮合,使间歇齿轮与第一传动齿轮啮合,从而使两个第二夹臂相互靠近,当第二夹臂对饮料瓶进行夹紧后,此时压力传感器移动使第一触头和第二触头相互接触后,压力传感器的电路接头,压力传感器开始工作,避免在搬运饮料瓶夹取的过程中饮料瓶发生变形。其中,用于夹紧饮料瓶的第二夹臂,其与饮料瓶外表面贴合的夹持部结构单一,因此,存在开水瓶瓶盖时打滑打不开、倒水时无法抓稳瓶子和瓶子出现角度倾斜的现象。
3、例如,中国专利cn116353907a公开了一种具有自动调节功能的装箱抓手,通过设置吊板、滑块、一体轴承座组件、滑板、分离轴承座组件和抓瓶组件的配合使用,解决了现有的装箱抓手无法调节间距,从而在使用时无法对不同位置的物体进行抓取的问题。其中,用于抓取罐体的抓瓶组件,其与罐体外表面贴合的夹持部同样存在结构单一的问题,因此,存在开水瓶瓶盖时打滑打不开、倒水时无法抓稳瓶子和瓶子出现角度倾斜的现象。
技术实现思路
1、有鉴于此,本实用新型提供一种机器人末端执行器及机器人,通过在用于夹持夹持物的第一部位的夹持件的其中一端设置用于与夹持物的第二部位抵接形成夹持的第二夹持部,可以实现机器人末端执行器从不同的部位稳定可靠地抓取夹持物将其转移或调整倾斜角度,还可以实现夹持物的第一部位与第二部位之间稳定可靠地相对转动,以提高用户体验感。
2、本实用新型的机器人末端执行器,包括相对设置的两组夹持件,其中,夹持件的内侧设有用于与夹持物的第一部位抵接的第一夹持部,夹持件的其中一端设有第二夹持部,第二夹持部的内侧用于与夹持物的第二部位抵接,第一夹持部与夹持物的第一部位抵接或分离时,夹持件沿水平方向延伸,第二夹持部与夹持物的第二部位抵接或分离时,夹持件沿竖直方向延伸。
3、根据本实用新型的机器人末端执行器,通过在用于夹持夹持物的第一部位的第一夹持部的其中一端进一步设置用于与夹持物的第二部位抵接形成夹持的第二夹持部,可以实现机器人末端执行器从不同的部位稳定可靠地抓取夹持物将其转移或调整倾斜角度,还可以驱使夹持物的第一部位与第二部位之间稳定可靠地相对转动,从而有效提高用户体验感。
4、在一实施例中,第二夹持部的下方设有卡接部,卡接部用于与夹持物的第三部位抵接,卡接部与夹持物的第三部位抵接时,夹持件沿竖直方向延伸。
5、通过进一步设置卡接部与夹持物的第二部位抵接,便于机器人末端执行器通过夹持物的第三部位抓取夹持物的时候进一步对夹持物进行支撑,有效防止夹持物掉落。
6、在一实施例中,卡接部的下方设有定位部,定位部用于与夹持物的第四部位抵接,定位部与夹持物的第四部位抵接时,夹持件沿竖直方向延伸。
7、通过进一步设置定位部对夹持物的第四部位进行定位,可以极大程度上避免在机器人末端执行器在通过夹持物的第二部位抓取水瓶、在驱使夹持物的第二部位相对夹持物的第一部位相对转动时夹持物存在角度倾斜的问题。
8、在一实施例中,夹持件上对应第二夹持部的一端设有延伸部,卡接部和定位部均设置在延伸部的内侧。
9、通过增设延伸部设置卡接部和定位部,结构简单紧凑,易于加工制作,且能够确保卡接部和定位部能够极其便捷地实现对夹持物的第三部位卡接和对夹持物的第四部位导正,防止在驱使夹持物的第二部位相对夹持物的第一部位相对转动的过程中打滑无法拧开或无法锁紧夹持物的第二部位,防止在通过夹持物的第二部位抓取夹持物时夹持物的第一部位倾斜导致影响抓取效率。
10、在一实施例中,卡接部设置在延伸部的内侧靠近第二夹持部的位置,卡接部为凸边结构。
11、上述结构形式的卡接部,结构极其简单,且操作简单便捷。
12、在一实施例中,定位部为设置在延伸部的内侧靠近延伸部的底部的位置,定位部为斜向内凹圆弧面结构。
13、上述结构形式的定位部,能够很好地与夹持物的第四部位紧密贴合,实现稳定可靠地定位导正效果。
14、在一实施例中,延伸部的宽度与夹持件的宽度一致。
15、上述结构形式的延伸部,能够进一步提高整个机器人末端执行器的外观的美观性和整体结构紧凑性,节省成本。
16、在一实施例中,第二夹持部设置在夹持件的内侧,第二夹持部为圆弧形夹头结构。
17、上述结构形式的第二夹持部,整体结构简单紧凑,易于加工制作,操作便捷。
18、在一实施例中,第二夹持部上靠近第一夹持部的侧部用于与夹持物的第一部位抵接。
19、进一步地,可以通过第二夹持部的侧部与第一夹持部配合实现对夹持物的第一部位的大面积的夹持,因此可以有效避免机器人末端执行器在通过夹持物的第一部位抓取夹持物调整其倾斜角度时无法抓稳夹持物的问题,从而有效避免降低用户体验感的问题。
20、在一实施例中,夹持件为圆弧形结构,第一夹持部为设置在夹持件内侧的圆弧形结构,第二夹持部上靠近第一夹持部的侧部设有用于与夹持物的第一部位抵接的圆弧面结构。
21、上述结构形式的夹持件、第一夹持部和第二夹持部,能够很好地形成配合,在夹持过程中增大对夹持部件的第一部位的夹持面积,极大程度上提高夹持物抓取的稳定可靠性。
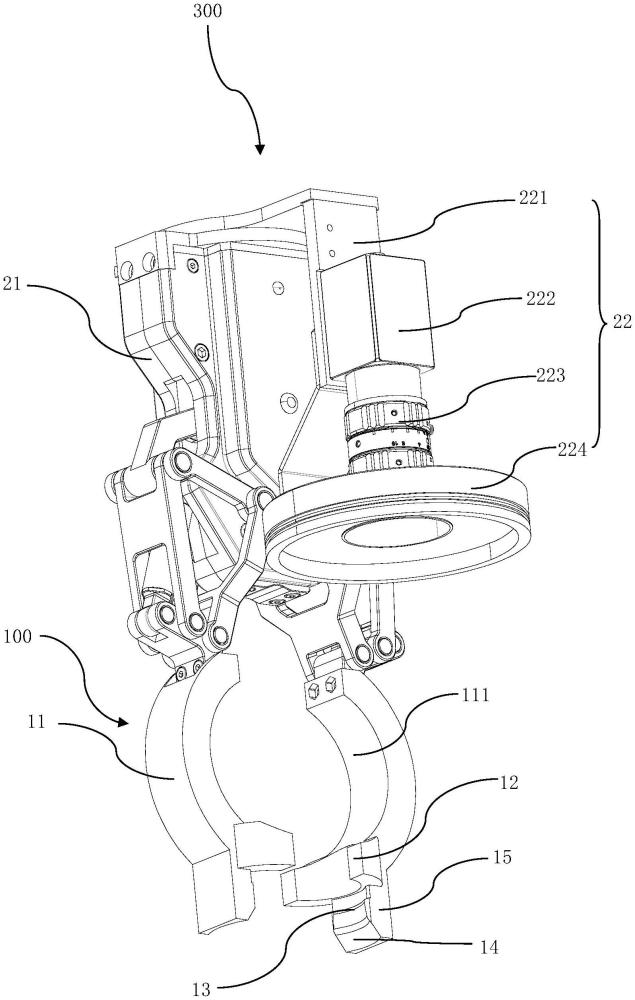
22、本实用新型第二方面的机器人,包括机器人夹爪,机器人夹爪的端部与上述所述的机器人末端执行器连接,机器人夹爪的侧部靠近机器人末端执行器的位置设有视觉定位模块。
23、显然,本实用新型的机器人,由于在机器人夹爪上设置了上述所述的机器人末端执行器,具有上述机器人末端执行器的所有优点和技术效果。
24、与现有技术相比,本实用新型的优点在于,通过在用于夹持夹持物的第一部位的第一夹持部的其中一端进一步设置用于与夹持物的第二部位抵接形成夹持的第二夹持部,可以实现机器人末端执行器从不同的部位稳定可靠地抓取夹持物将其转移或调整倾斜角度,还可以驱使夹持物的第一部位与第二部位之间稳定可靠地相对转动,从而有效提高用户体验感。
技术特征:
1.一种机器人末端执行器,其特征在于,包括相对设置的两组夹持件;其中,
2.如权利要求1所述的机器人末端执行器,其特征在于,所述第二夹持部的下方设有卡接部,所述卡接部用于与夹持物的第三部位抵接;
3.如权利要求2所述的机器人末端执行器,其特征在于,所述卡接部的下方设有定位部,所述定位部用于与夹持物的第四部位抵接;
4.如权利要求3所述的机器人末端执行器,其特征在于,所述夹持件上对应所述第二夹持部的一端设有延伸部,所述卡接部和所述定位部均设置在所述延伸部的内侧。
5.如权利要求4所述的机器人末端执行器,其特征在于,所述卡接部设置在所述延伸部的内侧靠近所述第二夹持部的位置,所述卡接部为凸边结构。
6.如权利要求4所述的机器人末端执行器,其特征在于,所述定位部为设置在所述延伸部的内侧靠近所述延伸部的底部的位置,所述定位部为斜向内凹圆弧面结构。
7.如权利要求2至6中任一项所述的机器人末端执行器,其特征在于,所述第二夹持部设置在所述夹持件的内侧,所述第二夹持部为圆弧形夹头结构。
8.如权利要求1至6中任一项所述的机器人末端执行器,其特征在于,所述第二夹持部上靠近所述第一夹持部的侧部用于与夹持物的第一部位抵接。
9.如权利要求8所述的机器人末端执行器,其特征在于,所述夹持件为圆弧形结构,所述第一夹持部为设置在所述夹持件内侧的圆弧面结构,所述第二夹持部上靠近所述第一夹持部的侧部设有用于与夹持物的第一部位抵接的圆弧面结构。
10.一种机器人,包括机器人夹爪,其特征在于,所述机器人夹爪的端部与上述权利要求1至9中任一项所述的机器人末端执行器连接,所述机器人夹爪的侧部靠近所述机器人末端执行器的位置设有视觉定位模块。
技术总结
一种机器人末端执行器,包括相对设置的两组夹持件,其中,夹持件的内侧设有用于与夹持物的第一部位抵接的第一夹持部,夹持件的其中一端设有第二夹持部,第二夹持部的内侧用于与夹持物的第二部位抵接,第一夹持部与夹持物的第一部位抵接或分离时,夹持件沿水平方向延伸,第二夹持部与夹持物的第二部位抵接或分离时,夹持件沿竖直方向延伸。该机器人末端执行器通过在夹持件的其中一端设置用于与夹持物的第二部位抵接形成夹持的第二夹持部,可以实现机器人末端执行器从不同的部位稳定可靠地抓取夹持物将其转移或调整倾斜角度,还可以实现夹持物的第一部位与第二部位之间稳定可靠地相对转动,以提高用户体验感。本技术还提供一种机器人。
技术研发人员:何佳荣
受保护的技术使用者:盈合(深圳)机器人与自动化科技有限公司
技术研发日:20230920
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!