一种CRP道集数据体重构的方法与流程
一种crp道集数据体重构的方法
技术领域
[0001]
本发明涉及石油地球物理勘探技术领域,特别是关于地震资料处理解释技术,具体涉及一种crp道集数据体重构的方法。
背景技术:
[0002]
近年来,随着岩性油气藏勘探地位的不断提升,叠前avo属性反演和叠前弹性参数反演技术得到了长足的发展,在岩性预测和油气勘探中得到广泛应用,其预测精度除了受反演方法本身影响外,还受到输入数据的影响。作为叠前avo属性及叠前弹性参数反演的输入数据,叠前crp(共反射点)道集的质量对反演结果影响较大。目前普遍认识到crp道集的信噪比、子波一致性、入射角范围、剩余动校及远道畸变等问题,对叠前或叠后反演结果有很大的影响,因此对叠前道集的入射角范围的设置是非常有必要的。常规叠前反演技术所输入的crp角度道集的临界入射角通常设置为某一固定的入射角度并进行目标层的avo反演,当选取大于临界入射角的道集进行avo反演时,则由于大入射角的道集可能产生波形畸变或极性反转等而给反演结果带来困扰。实际的情况是即使在同一研究区域内,由于地质条件及物探采集、处理技术等影响,造成各点上的目标层具有avo特征的临界入射角也各不相同。
[0003]
avo反演技术基于佐普里兹方程,当用泊松比参数替代横波速度参数、入射角小于30
°
时,佐普里兹方程简化为shuey近似方程,此方程的最显著特点是反射振幅仅随入射角的增大而增大。koefoed(1955)强调指出,在有限的入射角范围(0
°
到30
°
)内,反射系数曲线的形状只轻微地受入射和下伏的介质交换的影响,由于存在临界反射且反射系数幅度的变化率不同,在较大入射角处会发生明显的差别,这是因为大角度地震反射振幅在地震波传播过程中受地层的吸收衰减作用更强,在地震资料处理时动校正拉伸效应也更为严重,容易在叠加后产生地震反射波形变形。一些专利如发明《基于avo特征的crp道集真振幅恢复方法》(申请号:201310666981.9)的专利公开了主要是以佐普里兹弹性波动力学理论为基础,以保持叠前振幅随炮检距变化的关系为目标,通过shuey近似方程对地震数据进行剔除拟合,获得较精确的真振幅有效信号。目前在叠前crp道集的入射角范围的处理上还没有建立一个有效的工作流程,就现有的叠前crp道集资料来说,主要存在如下几个问题:
[0004]
(1)通常情况下各crp点上的临界入射角大小常常不一致;
[0005]
(2)采用较大入射角的叠前crp道集数据作为叠前反演数据输入或叠加处理,所得结果与实际情况往往不符。
技术实现要素:
[0006]
本发明的目的在于克服现有技术中所存在的采用较大入射角导致反演结构与实际情况不符的问题,提供一种crp道集数据体重构的方法。
[0007]
为了实现上述发明目的,本发明提供了以下技术方案:
[0008]
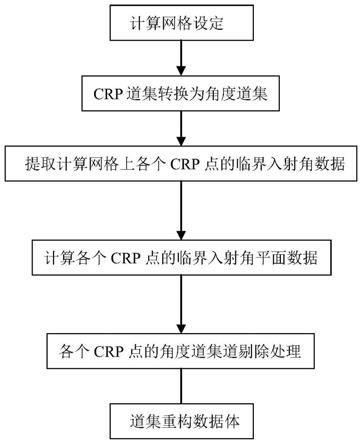
一种crp道集数据体重构的方法,包括如下步骤:
[0009]
步骤一、设计计算网格,求取网格点上的各个crp点的临界入射角数据;
[0010]
步骤二、对各个crp点的临界入射角数据进行内插、圆滑处理,得到关于目的层顶界面或底界面的临界入射角平面数据;
[0011]
步骤三、利用各个crp点的临界入射角平面数据,对各个crp点的角度道集中大于相应临界入射角的道集数据进行剔除,得到道集重构数据体。
[0012]
优选的,所述步骤三,还包括利用所述道集重构数据体进行叠前反演、叠后属性提取。
[0013]
优选的,所述步骤一,包括:
[0014]
a、对研究区进行相应的计算网格设计;
[0015]
b、将动校正处理后的crp道集数据转换到角度域中,得到crp角度道集数据,并对入射角在入射角阈值范围内的crp角度道集数据进行叠加处理,得到叠加数据体;
[0016]
c、利用井上的测井资料及地质分层数据对叠加数据体进行井——震标定,确定出目的层的顶界面、底界面,并选定顶界面或底界面作为种子点利用叠加数据体进行层位自动追踪,得到层位数据;
[0017]
d、将计算网格点上的层位数据投影到crp角度道集上,并在角度道集上进行层位追踪,得到crp角度道集的道集层位数据;
[0018]
e、利用道集层位数据,对各个crp点的角度道集确定相关的临界入射角数据值。
[0019]
优选的,所述入射角阈值范围为小于或等于30度。
[0020]
优选的,所述临界入射角的确定方法:
[0021]
建立crp点上的角度道集层位数据上的一系列振幅——入射角数据点的拟合关系曲线,该拟合曲线上的极值点所对应的入射角数据即为临界入射角。
[0022]
优选的,若由所述极值点确定的所述临界入射角大于30度,则设定所述临界入射角为30度。
[0023]
根据本发明的另一方面,提供一种电子设备,包括至少一个处理器,以及与所述至少一个处理器通信连接的存储器;所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行上述任一项所述的方法。
[0024]
与现有技术相比,本发明的有益效果:
[0025]
经过本发明处理后的道集重构数据体作为叠前反演的数据输入,所得的结果比使用没处理过的道集数据体采用同一参数及技术方法反演的结果更为准确及与井资料吻合性高,相对于传统的avo反演方法来说,使用处理后的道集重构数据体可准确地对储层进行探测。以南方勘探某区块为例说明,通过研究区已知钻井揭示所知,发明的成果和钻井资料吻合效果较好,可以准确地预测出含气储层区域。
附图说明:
[0026]
图1是本发明方法的步骤框图。
[0027]
图2是本发明实施例中某crp角度道集中临界入射角确定示意图。
[0028]
图3是本发明实施例重构的crp道集示意图。
[0029]
图4是根据本发明实施例的电子设备装置结构示意图。
具体实施方式
[0030]
下面结合试验例及具体实施方式对本发明作进一步的详细描述。但不应将此理解为本发明上述主题的范围仅限于以下的实施例,凡基于本发明内容所实现的技术均属于本发明的范围。
[0031]
本发明是一种利用crp角度道集数据进行基于目的层的临界入射角限定及道集剔除处理来进行后续叠前反演的技术,可准确地对目的层段的储层进行有效预测,达到与井上avo正演类型符合率相对较高。
[0032]
本发明方法的具体实施方式为:
[0033]
一、设计计算网格,求取网格点上的各个crp点的临界入射角数据。
[0034]
对研究区进行相应的计算网格设计,该计算网格一般为n线xm道。实际上计算网格应视计算精度及地震数据进行相应的设定。网格参数包括网格间距和网格数等,网格参数的大小可根据要提取的avo临界入射角的网格分布及精度需要情况确定,原则上通常设定的网格间距越大,则计算的精度相对较低,会丢失一些特征信息;网格间距越小,则计算的精度相对较高,所绘结果越详细。设定网格的大小应根据实际情况而定,设定的网格通常是规矩的。
[0035]
对动校正后的crp道集数据转换到角度域中,得到角度道集数据,并对crp角度道集数据进行设定一定入射角范围叠加处理,得到叠加数据体。通常是设定针对目的层埋深的入射角大于30
°
的道不参与叠加处理,得到相关叠加数据体。另外,可进一步对crp道集数据进行提高信噪比、分辨率及保真度等处理。角度道集转换可根据实际情况选用一种计算公式进行角度道集转换,角度道集的转换公式可为如下两种:
[0036][0037]
式(1)中θ为角度道的入射角,x为炮检距,v为均方根速度,t0为零偏移距的双程旅行时。
[0038][0039]
式(2)中α为角度道的入射角,v
int
为层速度,v
rms
为均方根速度,t为双程旅行时,x为炮检距。
[0040]
利用井上的测井资料及地质分层数据对叠加数据体进行井——震标定,确定出目的层的顶、底界面,并选定某一界面作为种子点利用叠加数据体进行层位自动追踪,得到层位数据,一般该界面为波峰或波谷反射。自动追踪方法一般采用的是基于波形特征的自动追踪方法。该方法在给定种子点的前提下,在给定的时窗范围内搜索与种子点波形结构特征相似的点。所述波形结构特征包括波峰、波谷,在地震数据体中逐道地自动识别出来,时窗范围一般为20ms。
[0041]
将计算网格点上的层位数据投影到crp角度道集上,并在该角度道集上进行层位自动追踪,得到crp角度道集的道集层位数据。
[0042]
利用道集层位数据对计算网格上各crp点的角度道集确定相关的临界入射角数据值。其中临界入射角的确定方法为建立crp点的角度道集层位数据上的一系列振幅——入
射角数据点的拟合关系曲线,该拟合曲线的极值点所对应的入射角度数据即为临界入射角;若由极值点确定的临界入射角大于30
°
,则设定临界入射角为30
°
。极值点一般可分为极大值点及极小值点两种,究竞选用何种极值点确定临界入射角应视拟合曲线及avo特征等实际情况而定。一般情况下,大多数crp角度道集的临界入射角位于14
°
~30
°
之间,具体为在0
°
~30
°
之间设置采样间隔,对拟合曲线上的每个采样入射角点所对应的振幅数据提取数据值,得到每个入射角所对应的振幅数据j
i
,并形成振幅数据集{j
i
};采样间隔的大小可视实际情况决定,一般取0.05
°
进行计算。曲线拟合的方法一般可采用最小二乘法进行拟合,极值求取的计算公式如下:
[0043]
j
max
=max{j
i
}
ꢀꢀ
(3)
[0044]
j
min
=min{j
i
}
ꢀꢀ
(4)
[0045]
临界入射角求取公式如下:
[0046]
j
max
→
θ
r
ꢀꢀ
(5)
[0047]
j
min
→
θ
r
ꢀꢀ
(6)
[0048]
式(3)-(6)中j
i
(i=1,2,...,n)为振幅——入射角数据点的拟合关系曲线上第i个采样入射角对应的振幅值,j
max
为振幅极大值,θ
r
为极值所对应的临界入射角数据值。
[0049]
步骤二、对各个crp点的临界入射角数据进行内插、圆滑处理,得到关于目的层顶界面或底界面的临界入射角平面数据;
[0050]
对网格点上各个crp点的临界入射角数据进行网格化插值、平滑滤波等处理,得到各个crp点的临界入射角数据。其中,网格化插值、平滑滤波等处理是将计算网格(通常计算网格大于1线x1道,一般为10线x10道)的临界入射角数据根据网格化插值算法内插成1线x1道,并对网格化计算后的临界入射角设定一定的滤波参数进行平滑滤波,使其消除某些临界入射角突变点,更接近实际的临界入射角的结果,从而得到各个crp点的临界入射角数据。网格化插值算法可有最小平方法、加权平均法、(泛)克里金法等,使用这些计算方法应根据实际情况而定。
[0051]
步骤三、利用各个crp点的临界入射角平面数据,对各个crp点的角度道集中大于相应临界入射角的道集数据进行剔除,得到道集重构数据体。并利用该重构数据体进行叠前反演、叠后属性提取等计算。
[0052]
实施例1
[0053]
本实例是对某三维工区的海相龙马溪组一段进行叠前反演前的crp道集数据重构。
[0054]
考虑到龙马溪组一段目的层相对较平的情况,将计算网格设计为20线x20道,可利用射线追踪方法将动校正后的crp道集转换到角度道集,设定叠加的入射角范围为0
°
~30
°
,叠加后对该数据体利用井数据进行井——震标定。确定目的层顶、底界面,综合考虑将目的层的顶界面设定为解释界面——较强的波峰反射,解释网格与计算网格一样为20线x20道,并对解释网格进行网格化插值计算,插值到1线x1道并得到层位数据,将层位数据投影到crp角度道集上得到道集层位数据。实例中对计算网格点上利用道集层位数据及crp角度道集进行临界入射角计算,并使用最小二乘法进行数据拟合,确定入射角范围0
°
~30
°
作为极值求取范围,并设定入射角的采样间隔为0.05
°
得到振幅数据集,并对该数据集求取极值,利用该极值所对应的入射角数据确定每个网格点上的临界入射角值数据。图2中为1589
线1825道的crp角度道集,目的层处于双程反射时间2150ms~2170ms之间,道集层位数据的反射振幅随入射角增大而增大呈现avo特征,即振幅随入射角呈增大的趋势,通过建立该道集层位数据的振幅——入射角数据点的拟合曲线,对该拟合曲线上的极值点进行确定,并由该极值点确定该道集的临界入射角;如由极值点确定的临界入射角大于30
°
,则设定该道集的临界入射角为30
°
。由拟合曲线上的极值点及其avo特征可得到该点crp角度道集的临界入射角确定为20.25
°
。
[0055]
对计算网格为20线x20道上的各个crp点的临界入射角值数据进行平面上的最小平方法网格化插值及滤波平滑处理,内插到1线x1道上,从而得到各个crp点的临界入射角平面数据。利用该平面数据进行各个crp点的角度道集的剔除,对大于临界入射角的道集数据进行踢除,得到处理后的crp角度道集重构数据体,利用道集重构数据体进行后续的叠前反演,如利用道集重构数据体进行设定三个入射角范围划分并叠加得到相关数据体,再利用这三个数据体进行叠前波阻抗反演、振幅属性提取等计算。实例中,对图2中某线1751道的crp角度道集大于20.25
°
入射角的数据道都要进行踢除,亦即剔除20.25
°
~33
°
之间的数据道。将处理后的道集重构数据体进行后续的划分入射角范围处理,入射角划分的范围是3
°
~12
°
、12
°
~21
°
、21
°
~30
°
;并将划分后的道集数据进行叠加后并得到三个入射角数据,如图3。最后,利用这三个入射角数据进行后续的叠前或叠后的反演或相关属性计算。
[0056]
对采用本发明技术的数据进行avo反演,所得的成果优于常规使用固定临界角的数据进行输入的avo反演;其次,利用道集重构数据体进行叠加所得成果进行发演或属性提取均优于全叠加的地震数据所得的成果。这些利用本发明所得的反演或属性成果更符合地质、钻井资料的成果,证明本发明是有效的。
[0057]
图4示出了根据本发明示例性实施例的电子设备(例如具备程序执行功能的计算机服务器),其包括至少一个处理器,电源,以及与所述至少一个处理器通信连接的存储器和输入输出接口;所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行前述任一实施例所公开的方法;所述输入输出接口可以包括显示器、键盘、鼠标、以及usb接口,用于输入输出数据;电源用于为电子设备提供电能。
[0058]
本领域技术人员可以理解:实现上述方法实施例的全部或部分步骤可以通过程序指令相关的硬件来完成,前述的程序可以存储于计算机可读取存储介质中,该程序在执行时,执行包括上述方法实施例的步骤;而前述的存储介质包括:移动存储设备、只读存储器(read only memory,rom)、磁碟或者光盘等各种可以存储程序代码的介质。
[0059]
当本发明上述集成的单元以软件功能单元的形式实现并作为独立的产品销售或使用时,也可以存储在一个计算机可读取存储介质中。基于这样的理解,本发明实施例的技术方案本质上或者说对现有技术做出贡献的部分可以以软件产品的形式体现出来,该计算机软件产品存储在一个存储介质中,包括若干指令用以使得一台计算机设备(可以是个人计算机、服务器、或者网络设备等)执行本发明各个实施例所述方法的全部或部分。而前述的存储介质包括:移动存储设备、rom、磁碟或者光盘等各种可以存储程序代码的介质。
[0060]
以上所述,仅为本发明具体实施方式的详细说明,而非对本发明的限制。相关技术领域的技术人员在不脱离本发明的原则和范围的情况下,做出的各种替换、变型以及改进均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1