形变监测方法及装置与流程
[0001]
本发明属于公共安全技术领域,尤其涉及一种形变监测方法及装置。
背景技术:
[0002]
随着经济的快速发展,越来越多的高楼、桥梁、水库等大型建筑物被建起。大型建筑物使用过程中,因长期的外力因素(如荷载,温度,强风,地震等)的影响,有点建筑物容易发生振动或变形,甚至局部破坏,这关系着人们的切身利益。因此,对大型建筑物的状况进行实时监控是防患于未然的最佳手段。以在建筑物发生巨大的变形之前及时发现,采取适当的防护措施,从而减少损失。
[0003]
变形监测是指:通过特有的测量仪器,监视构筑物的变形现象,常规的形变监测技术可包括:利用全站仪、水准仪进行侧角量边以及站点之间的高程;利用摄影测量、遥感等技术对大面积变形体的影像数据进行处理监测;
[0004]
随着gps(global positioning system)的出现,gps被用来监测建筑物的形变,但由于受到多路径误差、周跳及随机噪声等因素影响使得监测精度不高。
技术实现要素:
[0005]
有鉴于此,本发明实施例提供了一种形变监测方法及装置,以解决现有技术中监测精度不高的问题。
[0006]
本发明实施例的第一方面提供了一种形变监测方法,包括:
[0007]
获取实时观测数据流并存储所述观测数据流;
[0008]
基于一周期内已存储的所述观测数据流计算该周期内基准站至每一监测站的基线向量,并获得该周期内对应的监测站坐标;
[0009]
基于多个所述周期的监测站坐标进行比较以获得多个观测变形量,基于所述多个观测变形量拟合观测噪声曲线;
[0010]
基于所述观测噪声曲线预测下一周期的观测噪声;
[0011]
基于获得的下一周期的观测变形量和预测的下一周期的观测噪声,计算下一周期的去噪后变形量。
[0012]
本发明实施例的第二方面提供了一种形变监测装置,所述装置,用于执行如上述监测方法的步骤;
[0013]
本发明实施例与现有技术相比存在的有益效果是:通过观测噪声曲线来预测下一周期的观测噪声,根据下一周期的观测噪声及观测形变量来计算去噪后形变量,可提高形变监测的准确性。
附图说明
[0014]
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些
实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0015]
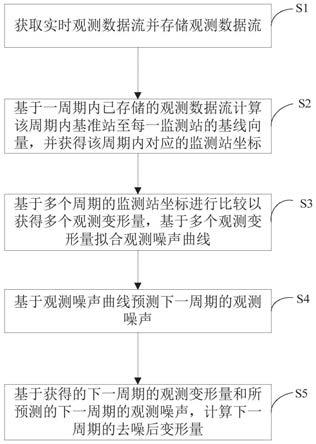
图1是本发明实施例提供的一种形变监测方法的流程示意图;
[0016]
图2是本发明实施例提供的一种形变监测装置的结构示意图。
具体实施方式
[0017]
以下描述中,为了说明而不是为了限定,提出了诸如特定系统结构、技术之类的具体细节,以便透彻理解本发明实施例。然而,本领域的技术人员应当清楚,在没有这些具体细节的其它实施例中也可以实现本发明。在其它情况中,省略对众所周知的系统、装置、电路以及方法的详细说明,以免不必要的细节妨碍本发明的描述。
[0018]
实施例一:
[0019]
图1示出了本发明实施例提供的一种形变监测方法的流程示意图,详述如下:
[0020]
步骤s1,获取实时观测数据流并存储所述观测数据流;
[0021]
具体地,获取实施观测数据流(优选为实时bds/gps数据),对所获取的实时bds/gps数据流进行解码处理,得到对应的处理文件,其中,所述处理文件包括观测文件及导航电文文件,该观测文件携带对应的观测数据。该实时观测数据是从gnss天线获取实时bds/gps数据流,该观测数据流来源于gps系统,或北斗系统,或同时来源于gps系统和北斗系统。
[0022]
步骤s2,基于一周期内已存储的观测数据流计算该周期内基准站至每一监测站的基线向量,并获得该周期内对应的监测站坐标;
[0023]
具体地,可以于一个周期存储一次当前获取的观测数据流,基于本周期内的已存储的观测数据流计算本周期内的基准站至每一监测站的基线向量,并获取该周期对应的监测站坐标;于是经过一段时间,可以得到多个周期的监测站坐标。
[0024]
首先,gnss(全球卫星导航定位系统)接收机通过设定的ip地址及端口,获取由gnss天线采集的实时bds/gps数据流,然后发送至网络,pc端通过socket访问前述控制文件所设定的ip地址及端口,获取实时bds/gps数据流,并转为二进制格式,存储为二进制文件,且每隔预设时间段存储一次,编辑成新的文件,例如文件命名为:ssssdddt.yyr,其中,ssss表示4个字符的监测站名称,ddd为年积日,t表示时段号,yy表示年的后两位数字,r表示未解码的二进制原始(raw)文件。进一步地,该实时bds/gps数据流携带对应的观测数据,例如未解码的二进制原始文件可认为是原始观测数据。该预设时间段可为1小时、2小时、4小时、6小时、12小时等,此处对此不作限制。
[0025]
接着,如预设时间段为1小时,由于每个一小时(此时,一个周期为一个小时)存储一次处理文件,优选地,在每个整点时刻过后,将当前时间段之前的一段时间长度的处理文件进行合并,然后将该合并的文件进行解码处理,得到处理文件,该处理文件包括观测文件及导航电文文件。该一段合并的总时间长度可为3小时、4小时、6小时或者8小时等,也可以为一天或多天,优选地,选择6小时作为优选的一段时间长度。
[0026]
步骤s3,基于多个周期的监测站坐标进行比较以获得多个观测变形量,基于多个观测变形量拟合观测噪声曲线;
[0027]
具体地,根据当前已经获取的多个周期下的监测站坐标进行比较,得到多个观测形变量,并基于多个观测形变量来进行拟合,得到观测噪声曲线。优选地,多个周期可以是
连续的周期,该周期可以是1小时、2小时、4小时、6小时、12小时等;若周期大于1小时,则周期优选地设置为2小时的倍数关系,更优选地,周期选为24的约数,这样方便按天计算。
[0028]
优选的,基于多个周期的监测站坐标进行比较以获得多个观测变形量,可以包括:将多个周期的监测站坐标中的任一在后的周期坐标与相邻n个周期的在前的周期坐标相减,以获得该后一周期的观测变形量。例如:可通过减法运算计算观测形变量,可用依次相减的方式,如24小时为一周期,一天一个周期,第一天为第一个周期,第二天为第二个周期,类推;第二个周期与第一个周期的坐标比较获得第二天相对第一天的观测变形量,第三个周期与第二个周期的坐标比较获得第三天相对于第二天的观测变形量等,为依次的相减;此时后一周期(第二周期)与在前的另一周期(第一周期)相邻1个周期。
[0029]
也例如间隔的相减,例如以12小时为一周期,第一天包括第一周期和第二周期,第二天包括第三周期和第四后期,类推,单数周期例如是指0点至12点,双数周期例如是指12点至24点;间隔的相减,例如第三周期与第一周期比较相减以获得第三周期(相对第一周期)的变形量,第四周期与第二周期比较相减以获得第四周期(相对第二周期)的变形量等,这样一天可以获得多个变形量;此时后一周期与在前的周期相邻2个周期。其他周期也可以类似间隔的比较;优选的,一天对应时间的周期与上一天对应时间的周期进行比较,比如周期为1小时的时候,第二天的0-1点的周期与第一天的0-1点的周期进行比较;此外,还可以其他方式获取变形量,此处对此不作限制。优选的,相邻n个周期的n可以为1,2,3,4,6,8,12,24之一,这样也方便按天计算。每个周期可以为1小时,或2小时,或4小时,或6小时,或12小时等。本发明不以此为限。
[0030]
步骤s4,基于观测噪声曲线预测下一周期的观测噪声;
[0031]
具体地,根据观测噪声曲线来预测下一周期的观测噪声;例如根据观测噪声曲线获得下一周期对应的值,作为预测的观测噪声。
[0032]
步骤s5,基于获得的下一周期的观测变形量和所预测的下一周期的观测噪声,计算下一周期的去噪后变形量;
[0033]
具体地,根据前述所获取的下一周期的观测形变量及所预测的下一周期的观测噪声来计算下一周期的去噪后的变形量。获得的下一周期的观测变形量是根据实时观测数据流通过前述步骤计算获得,里面包含了实际变形量和观测噪声,通过去除预测的观测噪声,可以获得去噪后变形量,去噪后变形量通常可以更接近实际变形量。
[0034]
在本实施例中,通过观测噪声曲线来预测下一周期的观测噪声,根据下一周期的观测噪声及观测形变量来计算形变量,可提高形变监测的准确性。
[0035]
在本实施例的一个优选方案中,该步骤s1之前还包括:
[0036]
建立全局控制文件;
[0037]
具体地,首先建立全局控制文件(global.config),该控制文件包括:卫星系统的选择、数据处理的间隔(例如一个小时)、观测卫星的截止高度角、数据处理采用观测值的类型、处理结果发送的ip地址及端口、基准站及监测站的概略坐标,每个监测站发送数据的ip地址及端口。进一步地,可选择基于全局控制文件,分别生成基准站与每一监测站的基线对应的控制文件;例如:根据前述的全局控制文件,为每一监测站生成对应的控制文件,该控制文件是基准站与该监测站的基线对应的控制文件,即生成单基线的控制文件;例如,该全局文件包括基准站与每一监测站之间的所有信息,将所有信息按监测站进行分类,优选地,
对基线进行分类,得到基准站与每一监测站之间的基线的控制文件,即控制文件的数量与监测站的数量一致。
[0038]
在本实施例的一个优选方案中,所述监测方法还包括:
[0039]
根据下一周期的观测变形量更新观测噪声曲线;
[0040]
具体地,在形成原始的观测噪声曲线后,可以根据下一周期的观测变形量更新观测噪声曲线;例如:原观测噪声曲线是根据第1天至第10天的观测变形量拟合得到,在获得第11天的观测变形量后,可以是根据第1天至第11天的观测变形量来拟合以更新所述原始观测噪声曲线,也可以是采用窗口滑动式更新,例如根据第2天到第11天的观测变形量拟合,之后可以继续根据第3天到第12天的观测变形量更新,此处对此不作限制;
[0041]
在本实施例的一个优选方案中,步骤s2中,基于一周期内已存储的观测数据流计算该周期内基准站至每一监测站的基线向量包括:
[0042]
基于所述观测数据流建立三差观测方程;
[0043]
具体地,该三差观测方程为:
[0044][0045]
其中:δ为星际间一次差分算子,δ3为三差算子,j,k为卫星,r,m为监测站,s为间隔的历元数,i为历元,ρ表示伪距观测值ε表示观测噪声。
[0046]
基于所建立的三差观测方程得到误差方程;
[0047]
具体地,由于监测点坐标(x,y,z)为方程中仅有的三个未知数,基于上述三差观测方程,得到对应的误差方程为:
[0048]
v(i,i+s)=a(i,i+s)δx+t(i,i+s);
[0049]
δx=-(a
t
pa)-1
a
t
pt;
[0050]
且t(i,i+s)=δ3ρ0(i,i+s)-δ3φ0(i,i+s);
[0051][0052]
其中,δx为监测站的坐标改正量的估值,ρ0表示卫星至接收机的距离近似值,p为三差观测值的权阵,t(i,i+s)表示常数项,δ3φ0(i,i+s)表示载波观测值,a(i,i+s)表示设计矩阵。
[0053]
基于误差方程进行周跳探测;
[0054]
具体地,在未发生周跳时,常数项t(i,i+s)及改正量v(i,i+s)的值相对较小,当t(i,i+s)大于第一预设值时,和/或v(i,i+s)大于第二预设值时,可认为当前存在周跳,因此,在进行最小二乘的迭代计算中,赋予三差观测值的权为0,即p(i,i+s)=0,随着计算的历元数的增加,三差解最后收敛,取整v(i,i+s),即i至i+s之间的周跳,随着坐标的收敛,对三差解得到的坐标进行更新。由于采用三差残差法进行周跳的探测,三差观测值不近消除了接收机钟差、卫星钟差,短基线中也极大削弱了电离层、对流层影响外,在历元间求差时也消除了整周模糊度。其中,所述第一预设值、第二预设值均可根据实际情况而设,此处对此不作限制。
[0055]
优选的,可以基于周跳探测的结果计算模糊度浮点解;
[0056]
具体地,首先建立双差观测方程,该双差观测方法具体为:
然后基于双差观测方程及法方程计算模糊度浮点解;
[0057]
例如,在bds/gps联合数据处理中,对于每一历元,对应的观测值误差方程为:
[0058]
其中,c表示北斗卫星,g表示gps卫星,n表示双差模糊度,表示北斗卫星模糊度设计矩阵,表示待估参数、l
g
表示常数项。
[0059]
优选地,可以调整bds与gps观测值之间的权重比例,例如为1∶1,1.5∶1,2∶1等,l为omc,在组成双差观测方程时,为bds系统与gps系统分别选择一个高度角最高的卫星作为该系统的参考星,例如,对于bds系统,其对应有多颗卫星,每一颗卫星的高度角不一致,此时可以将高度角最高的一颗卫星作为bds系统的参考卫星。然后将前述观测值误差方程的结果加入法方程若当前单历元对应的基线结果对应的残差小于设定值,则通过法方程叠加方程将该历元的残差结果加入下述方程,进而得到带估值的浮点解(即监测站的坐标数据)及模糊度浮点解,该方程为:其中,n为历元总数,表示双差模糊度。
[0060]
基于模糊度浮点解结果进行模糊度固定,得到固定解,所述固定解用于求解基准站至每一监测站的基线向量;
[0061]
具体地,根据前述模糊度浮点解来进一步进行模糊度的固定,得到固定解,固定解包括对应监测站的坐标。
[0062]
首先,基于模糊度浮点解结果计算宽巷模糊度,得到宽巷模糊度解;
[0063]
具体地,根据公式来计算宽巷模糊度,得到对应的宽巷模糊度解,其中,φ
wl
=φ
l1-φ
l2
,以一周为时间单位。其中,wl表示宽项,f
l1
表示l1的载波频率,φ
l1
表示l1载波观测值,p
l1
表示伪距观测值。
[0064]
进一步地,利用bds卫星信号b1及b2或者gps卫星信号的l1及l2上的伪距双差观测值,组建对应的误差方程:
[0065][0066]
其中,r1、r2、r
wl
分别对应l1、l2及l
wl
的伪距宽巷观测值,v为残差向量,b为接收机至卫星的方向余弦构成的设计矩阵,i为单位矩阵,表示待估参数表示宽巷模糊度,l
r
及l
wl
分别表示伪距及wl相位观测值的omc(observation minus calculation,常用向量);
[0067]
接着,基于宽巷模糊度解进行模糊度固定,得到固定解;
[0068]
具体地,基于宽巷模糊度解进行模糊度固定,得到固定解,当宽巷模糊度n
wl
固定之后,可将wl相位观测值恢复成伪距p
wl
,其中:
[0069]
结合卫星l1的原始相位观测值再次组建观测值的误差方程为:
[0070][0071]
其中,及v
l1
分别表示wl伪距观测值及l1相位观测值的残差向量,及l
l1
分别表示omc常数向量;
[0072]
进一步地,利用lambda算法搜索来固定l1的双差模糊度,得到双差模糊度n1,通过下述公式得到固定了l2上的整周模糊度n2=n
1-n
wl
,于是两个原始观测值的双差模糊度n1及n2均得到固定,从而获得模糊度固定解,该固定解可认为是监测站的坐标。
[0073]
需要说明的是,每次整点之后,计算一次固定解,得到一天中不同时段的监测站的坐标;
[0074]
在本实施例的进一步优选方案中,基于多个所述周期的监测站坐标进行比较以获得多个观测变形量,具体包括:
[0075]
基于对应的基线向量计算基准站与监测站之间在预设方向的差值;
[0076]
具体地,基于观测站的概略位置及监测站的概略位置,及预定时间段的连续观测数据计算基准站与该监测站的基线向量,得到与监测站数量一致的基线向量。
[0077]
在本实施例的一个优选方案中,基于对应的基线向量将对应的监测站的坐标进行坐标转换,得到转换结果;
[0078]
基于所述转换结果计算所述基准站与监测站之间在预设方向的差值。
[0079]
具体地,首先将得到的在不同时段的监测站的坐标(x
t
,y
t
,z
t
)分别与对应的监测点的基准(x0,y0,z0)进行比较并进行坐标转换,t表示时段号,通过下式得到转换结果;
[0080][0081]
其中λ,分别表示局部enu坐标原点的大地精度和大地纬度。基于转换结果计算在预设方向的差值。
[0082]
在本实施例的一个优选方案中,基于多个观测变形量拟合观测噪声曲线包括:
[0083]
根据拟合函数对多个观测变形量进行拟合,得到拟合函数;
[0084]
具体地,首先根据拟合公式对多个观测变形量进行拟合,该拟合公式具体为:其中,y
i,t
为第t天i时段对应周期获得的观测变形量,y
′
i,t
为拟合出的第t天i时段对应周期的观测噪声,a
t
为正弦函数的峰值。
[0085]
在本实施例的另一个优选方案中,基于多个观测变形量拟合观测噪声曲线,包括:
[0086]
根据拟合函数对多个观测变形量进行拟合得到对应的多个峰值;
[0087]
在本实施例的进一步优选方案中,基于所述观测噪声曲线预测下一周期的观测噪声,包括:
[0088]
对获取的多个峰值进行线性拟合得到下一周期对应的峰值;
[0089]
根据下一周期对应的峰值获得预测的下一周期内的观测噪声曲线;
[0090]
具体地,当一天之内多个周期内,24个时刻y
i
与y
′
i
平方和最小时,可得到a的最优解,重复前述峰值的拟合方式,得到连续n天的峰值a,如a1、a2、、、a
n
;所述多个峰值为a1、a2、、、a
t
;所述对获取的多个所述峰值进行线性拟合得到下一周期对应的峰值,对应的线性拟合函数为:a
t+1
=ax+b,其中,n为观测天数;
[0091]
所述根据下一周期对应的峰值获得预测的下一周期内的观测噪声曲线为
[0092]
在本实施例的一个优选方案中,步骤s5具体为:
[0093]
根据下一周期的观测形变量δ
i,t+1
enu及下一周期的观测噪声曲线来计算下一周期的去噪后变形量,;
[0094]
根据上述拟合的峰值a
t+1
,得到t+1天的噪声曲线y
i,t+1
友示第t+1天的i时段观测噪声。
[0095]
根据当天每个时段实际观测结果与该天对应时段的观测噪声预测值,两者相减,得到去噪后形变量。
[0096]
例如:根据前述拟合函数得到对应的峰值a,如,y
i
为第一天第i时刻的观测噪声,根据前述拟合公式当一天之内24个时刻y
i
与y
′
i
平方和最小时,可得到a的最优解,重复前述峰值的拟合方式,得到连续n天的峰值a,如a1、a2、、、a
n
,从而得到n天的拟合函数,对a1、a2、、、a
n
进行线性拟合,得到噪声曲线y=ax+b,通过该噪声曲线y=ax+b及a1、a2、、、a
n
得到a
n+1
,当连续观测日期t小于15天时,利用t天的a值预测t+1天时的a
n+1
,当
连续观测日期多于15天时,则利用之前15天的a值预测下一天的a值(例如,如果要得知第20天的a值,则有该天的前15天的a值去预测,即利用第5至19天的a值预测);以达到利用滑动窗口进行预测,从而得到可靠的预测值。然后,根据当天的实际观测结果及对应的噪声拟合结果,实际观测结果与噪声拟合结果之间的差值即为真实变形量。
[0097]
在本实施例中,通过观测噪声曲线来预测下一周期的观测噪声,根据下一周期的观测噪声及观测形变量来计算形变量,可提高形变监测的准确性。
[0098]
其次,实时采集bds/gps数据流,并对实时采集的数据流进行处理,基于处理结果进行形变量的提取,可提高形变量监测精度。
[0099]
再者,采用法方程叠加方式进行数据处理,可提高观测精度,且对计算结果进行去噪处理,可提高变形量提取的准确性。
[0100]
实施例二:
[0101]
基于上述实施例一,图2示出了本发明实施例提供的一种形变监测装置的结构示意图,所述装置用于执行上述实施例一的方法的步骤,为了便于说明,仅示出了与本申请实施例相关的部分:
[0102]
该监测装置包括获取单元1、与获取单元1连接的向量计算单元2、与向量计算单元2连接的拟合单元3、与拟合单元3连接的预测单元4、与预测单元4连接的变形量计算单元5其中:
[0103]
获取单元1,用于获取实时观测数据流并存储所述观测数据流;
[0104]
具体地,获取实施观测数据流(优选为实时bds/gps数据),对所获取的实时bds/gps数据流进行解码处理,得到对应的处理文件,其中,所述处理文件包括观测文件及导航电文文件,该观测文件携带对应的观测数据。该实时观测数据是从gnss天线获取实时bds/gps数据流,该观测数据流来源于gps系统,或北斗系统,或同时来源于gps系统和北斗系统。
[0105]
首先,gnss(全球卫星导航定位系统)接收机通过设定的ip地址及端口,获取由gnss天线采集的实时bds/gps数据流,然后发送至网络,pc端通过socket访问前述控制文件所设定的ip地址及端口,获取实时bds/gps数据流,并转为二进制格式,存储为二进制文件,且每隔预设时间段存储一次,编辑成新的文件。进一步地,该实时bds/gps数据流携带对应的观测数据,例如未解码的二进制原始文件可认为是原始观测数据。该预设时间段可为1小时、2小时、4小时、6小时、12小时等,此处对此不作限制。
[0106]
接着,如预设时间段为1小时,由于每个一小时(此时,一个周期为一个小时)存储一次处理文件,优选地,在每个整点时刻过后,将当前时间段之前的一段时间长度的处理文件进行合并,然后将该合并的文件进行解码处理,得到处理文件,该处理文件包括观测文件及导航电文文件。该一段合并的总时间长度可为3小时、4小时、6小时或者8小时等,也可以为一天或多天,优选地,选择6小时作为优选的一段时间长度。
[0107]
向量计算单元2,用于基于一周期内已存储的观测数据流计算该周期内基准站至每一监测站的基线向量,并获得该周期内对应的监测站坐标;
[0108]
具体地,每隔一个周期存储一次当前获取的观测数据流,基于本周期内的已存储的观测数据流计算本周期内的基准站至每一监测站的基线向量,并获取该周期对应的监测站坐标;于是经过一段时间,得到多个周期下的监测站坐标;
[0109]
拟合单元3,用于基于多个周期的监测站坐标进行比较以获得多个观测变形量,基
于多个观测变形量拟合观测噪声曲线;
[0110]
具体地,根据当前已经获取的多个周期下的监测站坐标进行比较,得到多个观测形变量,并基于多个观测形变量来进行拟合,得到观测噪声曲线。
[0111]
优选地,多个周期可以是连续的周期,该周期可以是1小时、2小时、4小时、6小时、12小时等,以若周期大于1小时,则周期优选地设置为2的倍数关系,更优选地,周期选为24的约数,这样方便按天计算。
[0112]
优选地,基于多个周期的监测站坐标进行比较以获得多个观测变形量,可以包括:将多个周期的监测站坐标中的任一在后周期坐标与相邻n个周期的在前周期坐标相减,以获得该后一周期的观测变形量。
[0113]
例如:可通过减法运算计算观测形变量,可用依次相减的方式,如24小时为一周期,一天一个周期,第一天为第一个周期,第二天为第二个周期,类推;第二个周期与第一个周期的坐标比较获得第二天相对第一天的观测变形量,第三个周期与第二个周期的坐标比较获得第三天相对于第二天的观测变形量等,为依次的相减;此时后一周期(第二周期)与在前的另一周期(第一周期)相邻1个周期。
[0114]
也例如间隔的相减,例如以12小时为一周期,第一天包括第一周期和第二周期,第二天包括第三周期和第四后期,类推,单数周期例如是指0点至12点,双数周期例如是指12点至24点;间隔的相减,例如第三周期与第一周期比较相减以获得第三周期(相对第一周期)的变形量,第四周期与第二周期比较相减以获得第四周期(相对第二周期)的变形量等,这样一天可以获得多个变形量;此时后一周期与在前的周期相邻2个周期。其他周期也可以类似间隔的比较;优选的一天对应时间的周期与上一天对应时间的周期进行比较,比如周期为1小时的时候,第二天的0-1点的周期与第一天的0-1点的周期进行比较;此外,还可以其他方式获取变形量,此处对此不作限制。优选的,相邻n个周期的n可以为1,2,3,4,6,8,12,24之一,这样也方便按天计算。每个周期可以为1小时,或2小时,或4小时,或6小时,或12小时等。本发明不以此为限。
[0115]
预测单元4,用于基于观测噪声曲线预测下一周期的观测噪声;
[0116]
具体地,根据观测噪声曲线来预测下一周期的观测噪声;例如根据观测噪声曲线获得下一周期对应的值,作为预测的观测噪声。
[0117]
变形量计算单元5,用于基于获得的下一周期的观测变形量和所预测的下一周期的观测噪声,计算下一周期的去噪后变形量;
[0118]
具体地,根据前述所获取的下一周期的观测形变量及所预测的下一周期的观测噪声来计算下一周期的去噪后的变形量。获得的下一周期的观测变形量是根据实时观测数据流通过前述步骤计算获得,里面包含了实际变形量和观测噪声,通过去除预测的观测噪声,可以获得去噪后变形量,去噪后变形量通常可以更接近实际变形量。
[0119]
在本实施例中,通过观测噪声曲线来预测下一周期的观测噪声,根据下一周期的观测噪声及观测形变量来计算形变量,可提高形变监测的准确性。
[0120]
在本实施例的一个优选方案中,该装置还包括:与获取单元1连接的建立单元,其中:
[0121]
在本实施例的一个优选方案中,该预测单元4还用于:
[0122]
根据下一周期的观测变形量更新观测噪声曲线;
[0123]
具体地,在形成原始的观测噪声曲线后,可以根据下一周期的观测变形量更新观测噪声曲线;例如:原观测噪声曲线是根据第1天至第10天的观测变形量拟合得到,在获得第11天的观测变形量后,可以是根据第1天至第11天的观测变形量来拟合以更新所述原始观测噪声曲线,也可以是采用窗口滑动式更新,例如根据第2天到第11天的观测变形量拟合,之后可以继续根据第3天到第12天的观测变形量更新,此处对此不作限制;
[0124]
在本实施例的一个优选方案中,该向量计算单元2具体用于:
[0125]
基于所述观测数据流建立三差观测方程;
[0126]
具体地,首先基于全局控制文件,分别生成基准站与每一监测站的基线对应的控制文件;例如:根据前述的全局控制文件,为每一监测站生成对应的控制文件,该控制文件是基准站与该监测站的基线对应的控制文件,即生成单基线的控制文件;例如,该全局文件包括基准站与每一监测站之间的所有信息,将所有信息按监测站进行分类,优选地,对基线进行分类,得到基准站与每一监测站之间的基线的控制文件,即控制文件的数量与监测站的数量一致。
[0127]
具体地,该三差观测方程为:
[0128][0129]
其中:δ为星际间一次差分算子,δ3为三差算子,j,k为卫星,r,m为监测站,s为间隔的历元数,i为历元,ρ表示伪距观测值ε表示观测噪声。
[0130]
基于所建立的三差观测方程得到误差方程;
[0131]
具体地,由于监测点坐标(x,y,z)为方程中仅有的三个未知数,基于上述三差观测方程,得到对应的误差方程为:
[0132]
v(i,i+s)=a(i,i+s)δx+t(i,i+s);
[0133]
δx=-(a
t
pa)-1
a
t
pt;
[0134]
且t(i,i+s)=δ3ρ0(i,i+s)-δ3φ0(i,i+s);
[0135][0136]
其中,δx为监测站的坐标改正量的估值,ρ0表示卫星至接收机的距离近似值,p为三差观测值的权阵,t(i,i+s)表示常数项,δ3φ0(i,i+s)表示载波观测值,a(i,i+s)表示设计矩阵。
[0137]
基于误差方程进行周跳探测;
[0138]
具体地,在未发生周跳时,常数项t(i,i+s)及改正量v(i,i+s)的值相对较小,当t(i,i+s)大于第一预设值时,和/或v(i,i+s)大于第二预设值时,可认为当前存在周跳,因此,在进行最小二乘的迭代计算中,赋予三差观测值的权为0,即p(i,i+s)=0,随着计算的历元数的增加,三差解最后收敛,取整v(i,i+s),即i至i+s之间的周跳,随着坐标的收敛,对三差解得到的坐标进行更新。由于采用三差残差法进行周跳的探测,三差观测值不近消除了接收机钟差、卫星钟差,短基线中也极大削弱了电离层、对流层影响外,在历元间求差时也消除了整周模糊度。其中,所述第一预设值、第二预设值均可根据实际情况而设,此处对此不作限制。
[0139]
基于周跳探测的结果计算模糊度浮点解;
[0140]
具体地,首先建立双差观测方程,该双差观测方法具体为:然后基于双差观测方程及法方程计算模糊度浮点解;
[0141]
例如,在bds/gps联合数据处理中,对于每一历元,对应的观测值误差方程为:
[0142]
其中,c表示北斗卫星,g表示gps卫星,n表示双差模糊度,表示北斗卫星模糊度设计矩阵,表示待估参数、l
g
表示常数项。
[0143]
优选地,可以调整bds与gps观测值之间的权重比例,例如为1∶1,1.5∶1,2∶1等,l为omc在组成双差观测方程时,为bds系统与gps系统分别选择一个高度角最高的卫星作为该系统的参考星,例如,对于bds系统,其对应有多颗卫星,每一颗卫星的高度角不一致,此时可以将高度角最高的一颗卫星作为bds系统的参考卫星。然后将前述观测值误差方程的结果加入法方程,若当前单历元对应的基线结果对应的残差小于设定值,则通过法方程叠加方程将该历元的残差结果加入下述方程,进而得到带估值的浮点解(即监测站的坐标数据)及模糊度浮点解,该方程为:,其中,n为历元总数。
[0144]
基于模糊度浮点解结果进行模糊度固定,得到固定解,所述固定解用于求解基准站至每一监测站的基线向量;
[0145]
具体地,根据前述模糊度浮点解来进一步进行模糊度的固定,得到固定解,固定解包括对应监测站的坐标。
[0146]
首先,基于模糊度浮点解结果计算宽巷模糊度,得到宽巷模糊度解;
[0147]
具体地,根据公式来计算宽巷模糊度,得到对应的宽巷模糊度解,其中,φ
wl
=φ
l1-φ
l2
,以一周为时间单位。其中,wl表示宽项,f
l1
表示l1的载波频率,φ
l1
表示l1载波观测值,p
l1
表示伪距观测值。
[0148]
进一步地,利用bds卫星信号b1及b2或者gps卫星信号的l1及l2上的伪距双差观测值,组建对应的误差方程:
[0149][0150]
其中,r1、r2、r
wl
分别对应l1、l2及l
wl
的伪距宽巷观测值,v为残差向量,b为接收机至卫星的方向余弦构成的设计矩阵,i为单位矩阵,表示待估计基线向量,表示宽巷模糊
度,l
r
及l
wl
分别表示伪距及wl相位观测值的omc(observation minus calculation,常用向量);
[0151]
接着,基于宽巷模糊度解进行模糊度固定,得到固定解;
[0152]
具体地,基于宽巷模糊度解进行模糊度固定,得到固定解,当宽巷模糊度n
wl
固定之后,可将wl相位观测值恢复成伪距p
wl
,其中:
[0153]
结合卫星l1的原始相位观测值再次组建观测值的误差方程为:
[0154][0155]
其中,及v
l1
分别表示wl伪距观测值及l1相位观测值的残差向量,及l
l1
分别表示omc常数向量;
[0156]
进一步地,利用lambda算法搜索来固定l1双差模糊度,得到双差模糊度n1,通过下述公式得到固定了l2上的整周模糊度n2=n
1-n
wl
,于是两个原始观测值的双差模糊度n1及n2均得到固定,从而获得模糊度固定解,该固定解可认为是监测站的坐标。
[0157]
需要说明的是,每次整点之后,计算一次固定解,得到一天中不同时段的监测站的坐标;
[0158]
在本实施例的进一步优选方案中,拟合单元3具体用于:
[0159]
基于对应的基线向量计算基准站与监测站之间在预设方向的差值;
[0160]
具体地,基于观测站的概略位置及监测站的概略位置,及预定时间段的连续观测数据计算基准站与该监测站的基线向量,得到与监测站数量一致的基线向量。
[0161]
在本实施例的一个优选方案中,基于对应的基线向量将对应的监测站的坐标进行坐标转换,得到转换结果;
[0162]
基于所述转换结果计算所述基准站与监测站之间在预设方向的差值。
[0163]
具体地,首先将得到的在不同时段的监测站的坐标(x
t
,y
t
,z
t
)分别与对应的监测点的基准(x0,y0,z0)进行比较并进行坐标转换,t表示时段号,通过下式得到转换结果。
[0164][0165]
其中λ,分别表示局部enu坐标原点的大地精度和大地纬度。基于转换结果计算在预设方向的差值。
[0166]
在本实施例的一个优选方案中,该拟合单元3还用于:
[0167]
根据拟合函数对多个观测变形量进行拟合,得到拟合函数;
[0168]
具体地,首先根据拟合公式对多个观测变形量进行拟合,该拟合公式具体为:其中,y
i,t
为第t天i时段对应周期获得的观测变形量,y
′
i,t
为拟合出的第t天i时段对应周期的观测噪声,a
t
为正弦函数的峰值。
[0169]
在本实施例的另一个优选方案中,该预测单元4还用于:
[0170]
根据拟合函数对多个观测变形量进行拟合得到对应的多个峰值;
[0171]
在本实施例的进一步优选方案中,该预测单元4还用于:
[0172]
对获取的多个峰值进行线性拟合得到下一周期对应的峰值;
[0173]
根据下一周期对应的峰值获得预测的下一周期内的观测噪声曲线;
[0174]
具体地,当一天之内24个时刻y
i
与y
′
i
平方和最小时,可得到a的最优解,重复前述峰值的拟合方式,得到连续n天的峰值a,如a1、a2、、、a
n
;所述多个峰值为a1、a2、、、a
t
;所述对获取的多个所述峰值进行线性拟合得到下一周期对应的峰值,对应的线性拟合函数为:a
t+1
=ax+b,其中,n为观测天数;
[0175]
所述根据下一周期对应的峰值获得预测的下一周期内的观测噪声曲线为
[0176]
在本实施例的一个优选方案中,变形量计算单元5具体用于:
[0177]
根据下一周期的观测形变量δ
i,t+1
enu及下一周期的观测噪声曲线来计算下一周期的去噪后变形量,;
[0178]
根据上述拟合的峰值a
t+1
,得到t+1天的噪声曲线y
i,t+1
表示第t+1天的i时段观测噪声。
[0179]
根据当天每个时段实际观测结果与该天对应时段的观测噪声预测值,两者相减,得到去噪后形变量。
[0180]
例如:根据前述拟合函数得到对应的峰值a,如,y
i
为第一天第i时刻的观测噪声,根据前述拟合公式当一天之内24个时刻y
i
与y
i
平方和最小时,可得到a的最优解,重复前述峰值的拟合方式,得到连续n天的峰值a,如a1、a2、、、a
n
,从而得到n天的拟合函数,对a1、a2、、、a
n
进行线性拟合,得到噪声曲线y=ax+b,通过该噪声曲线y=ax+b及a1、a2、、、a
n
得到a
n+1
,当连续观测日期t小于15天时,利用t天的a值预测t+1天时的a
n+1
,当连续观测日期多于15天时,则利用之前15天的a值预测下一天的a值(例如,如果要得知第20天的a值,则有该天的前15天的a值去预测,即利用第5至19天的a值预测);以达到利用滑动窗口进行预测,从而得到可靠的预测值。然后,根据当天的实际观测结果及对应的噪声拟合结果,实际观测结果与噪声拟合结果之间的差值即为真实变形量。
[0181]
在本实施例中,通过观测噪声曲线来预测下一周期的观测噪声,根据下一周期的观测噪声及观测形变量来计算形变量,可提高形变监测的准确性。
[0182]
其次,实时采集bds/gps数据流,并对实时采集的数据流进行处理,基于处理结果进行形变量的提取,可提高形变量监测精度。
[0183]
再者,采用法方程叠加方式进行数据处理,可提高观测精度,且对计算结果进行去噪处理,可提高变形量提取的准确性。
[0184]
本领域普通技术人员可以意识到,结合本文中所公开的实施例描述的各示例的单
元及算法步骤,能够以电子硬件、或者计算机软件和电子硬件的结合来实现。这些功能究竟以硬件还是软件方式来执行,取决于技术方案的特定应用和设计约束条件。专业技术人员可以对每个特定的应用来使用不同方法来实现所描述的功能,但是这种实现不应认为超出本发明的范围。
[0185]
本发明实现上述实施例方法中的全部或部分流程,也可以通过计算机程序来指令相关的硬件来完成。
[0186]
以上所述实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1