翻转装置及利用其的对象物检查方法与流程
[0001]
本公开涉及一种抓住对象物并使之旋转的翻转装置及利用翻转装置来检查对象物的方法。
背景技术:
[0002]
就制造各种物品并直接流通或进行与其他物品的组装的情形而言,执行对物品(对象物)的制造状态或组装状态的检查,是提高制品可靠性所必需的工序。以往物品的检查是目视检查,但最近开发了利用检查装备提高精密度、提高作业速度的技术。
[0003]
这种检查工序随着引进工序自动化而采用了自动移送检查对象的方式,作为最普通的方法,是利用传输带移送物品。当利用检查装备检查自动移送来的物品时,检查了物品的上面后,为了检查物品的下面,需要使物品的上下面转换的作业。使物品的上下面转换的作业通常以手工作业实现或配备另外的倒转装置(翻转装置)来实现。
技术实现要素:
[0004]
(技术问题)
[0005]
以往,为了在利用移送轨道移送对象物的同时检查上面及侧面,在对象物的上面及侧面分别需要摄像装置,由于摄像装备非常昂贵,存在检查装置的费用相当高的问题。另外,以往不仅是对象物上面及侧面,还存在与移送方向平行的前方面及后方面的检查不便的问题。本公开的实施例解决前述以往技术的问题。
[0006]
以往,当利用翻转沿着移送轨道移动的对象物的装置时,存在空间效率低下、检查对象物需要的时间变长的问题。本公开的实施例解决前述以往技术的问题。
[0007]
(解决技术问题的手段)
[0008]
本公开的一个侧面提供一种翻转装置的实施例。根据代表性实施例的翻转装置包括:y轴翻转单元,所述y轴翻转单元沿y轴方向抓住对象物,以y轴为中心使所述对象物旋转;x轴翻转单元,所述x轴翻转单元沿x轴方向抓住所述对象物,以x轴为中心使所述对象物旋转;及z轴升降单元,所述z轴升降单元支撑所述y轴翻转单元及所述x轴翻转单元,使所述y轴翻转单元及x轴翻转单元沿z轴方向升降。
[0009]
本公开的另一侧面提供一种对象物检查方法的实施例。代表性实施例的对象物检查方法利用抓住对象物并使所述对象物旋转的翻转装置和检测所述对象物的朝向+z轴方向的对象面的摄像装置。所述检查方法包括:初期检查步骤,所述翻转装置的y轴支架沿y轴方向抓住所述对象物,所述摄像装置检查所述对象物的对象面a;第一中期检查步骤,所述y轴支架使所述对象物以y轴为中心旋转,所述摄像装置检测垂直于所述对象面a的对象面b1及作为所述对象面b1相反面的对象面b2;第二中期检查步骤,所述翻转装置的x轴支架沿x轴方向抓住所述对象物并使所述对象物以x轴为中心旋转,所述摄像装置检查垂直于所述对象面a的对象面b3及作为所述对象面b3相反面的对象面b4;及后期检查步骤,所述y轴支架沿y轴方向抓住所述对象物,所述摄像装置检查作为所述对象面a相反面的对象面c。
[0010]
(发明效果)
[0011]
根据本公开的实施例,可以通过一个摄像装备,检查对象物的多角度的表面。
[0012]
根据本公开的实施例,可以在使对象物以多样角度旋转的同时,还可以有效利用空间,并缩短对象物的检查时间。
[0013]
根据本公开的实施例,可以准确地设置对象物的检查位置。
[0014]
根据本公开的实施例,翻转装置的各部件的拆装及维护容易。
附图说明
[0015]
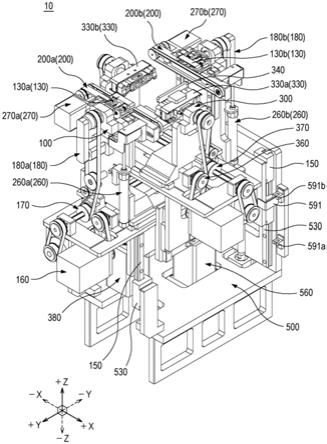
图1是根据本公开一实施例的翻转装置10的立体图。
[0016]
图2及图3是图1的y轴翻转单元100、移送单元200及驱动部160、170、180、260、270、380的立体图。
[0017]
图4是图1的x轴翻转单元300及驱动部360、370的立体图。
[0018]
图5及图6是图1的z轴升降单元500及z轴升降驱动部560的立体图。
[0019]
图7至图11作为依次显示翻转装置10一实施例的运转过程的立体图,为了说明的便利,在一些图中省略了x轴翻转单元300及z轴升降单元500。
[0020]
图12是图2的y轴支架130及辅助夹紧部驱动部180的旋转杆182c的分解立体图。
[0021]
图13是图12的y轴旋转杆182c、轴杆131及旋转销132的组装状态的立体图。
[0022]
图14a是沿着图8的线s1-s1'将翻转装置10截断的部分剖面图。
[0023]
图14b是沿着图9的线s2-s2'将翻转装置10截断的部分剖面图。
[0024]
图14c是沿着图11的线s3-s3'将翻转装置10截断的部分剖面图。
[0025]
图15a是沿着图8的线s4-s4'将翻转装置10截断的部分剖面图。
[0026]
图15b是沿着图9的线s5-s5'将翻转装置10截断的部分剖面图。
[0027]
图16至图18作为依次示出翻转装置10在图11所示状态之后,根据一实施例的运转过程的立体图,为了说明的便利,在一些图中省略了x轴翻转单元300及z轴升降单元500。
[0028]
图19a是沿x轴方向观察图10所示状态的翻转装置10的立面图。
[0029]
图19b是沿x轴方向观察图16所示状态的翻转装置10的立面图。
[0030]
图19c是沿x轴方向观察图17a所示状态的翻转装置10的立面图。
[0031]
图20至图24作为依次显示翻转装置10在图18所示状态之后,根据一实施例的运转过程的立体图,为了说明便利,在一些图中省略了y轴翻转单元100及z轴升降单元500。
[0032]
图25a是沿x轴方向观察图22所示状态的翻转装置10的立面图。
[0033]
图25b是沿x轴方向观察图23a所示状态的翻转装置10的立面图。
[0034]
图26至图29是依次显示翻转装置10在图24所示状态之后,根据一实施例的运转过程的立体图。
[0035]
图30是利用本公开一实施例的翻转装置的对象物检查方法的流程图。
具体实施方式
[0036]
本发明的实施例是为了说明本发明技术思想的目的而示例性提出的。本公开的权利范围不限定于以下提示的实施例或对这些实施例的具体说明。
[0037]
只要未不同地定义,本公开中使用的所有技术术语及科学术语具有本公开所属技
术领域的普通技术人员一般理解的意义。本公开中使用的所有术语是出于更明确地说明本公开的目的而选择的,并非是为了限制本公开的权利范围而选择的。
[0038]
本发明中使用的诸如“包括的”、“具备的”、“具有的”等表现,只要在包含相应表现的语句或文章中未不同地提及,应理解为具有包括其他实施例的可能性的开放型术语(open-ended terms)。
[0039]
只要未不同地提及,本公开中记述的单数型的表现可以包括复数型的意义,这也同样适用于权利要求书中记载的单数型的表现。
[0040]
本发明使用的“第一”、“第二”等表现,用于相互区分多个构成要素,并非限定相应构成要素的顺序或重要度。
[0041]
在本公开中,当提及某种构成要素“连接于”或“接入于”其他构成要素时,应理解为既可以是所述某种构成要素直接连接于或接入于所述其他构成要素,也可以是以新的其他构成要素为媒介而连接或接入。
[0042]
为了参照附图来说明本公开,以基于相互垂直的x轴、y轴及z轴的空间直角坐标系为基准进行说明。即,可以在xyz直角坐标上说明实施例的各构成。各轴方向(x轴方向、y轴方向、z轴方向)意味着各轴伸展的两侧方向。在各轴方向前加上“+”符号(+x轴方向、+y轴方向、+z轴方向),意味着作为各轴伸展的两侧方向中某一个方向的正方向。在各轴方向前加上
“-”
符号(-x轴方向、-y轴方向、-z轴方向),意味着作为各轴伸展的两侧方向中剩余一个方向的负方向。这毕竟是用于使得能够明确理解本公开所需的基准,当然,根据将基准设在哪里也可以不同地定义各方向。
[0043]
在本公开中使用的“上方”、“上”等方向指示词意味着以+z轴方向为基准,“下方”、“下”等方向指示词意味着-z轴方向。附图中图示的翻转装置10也可以不同地配向,所述方向指示词也可以据此相应的进行解释。
[0044]
本公开中使用的“对象物”意味着成为检查对象的物件,在本公开中,作为所述对象物的示例,显示了手机壳,但不限定于此。可以将所述对象物中成为检查对象的外表面中朝向某一方向的面称为“对象面”。在本公开的附图中,图示了对象物m及对象面a、b1、b1a、b1b、b2、b3、b3a、b3b、b4、c。
[0045]
下面参照附图,说明本公开的实施例。在附图中,对相同或对应的构成要素,赋予相同的附图标记。另外,在以下实施例的说明中,可以省略重复记述相同或对应的构成要素。但是,即使省略关于构成要素的记述,也并不是说某个实施例中不包括这种构成要素。
[0046]
图1是本公开一个实施例的翻转装置10的立体图。参考图1,翻转装置10包括y轴翻转单元100,所述y轴翻转单元100用于沿y轴方向抓住对象物(参考图7的m),以y轴为中心使所述对象物旋转。翻转装置10包括z轴升降单元500,所述z轴升降单元500用于支撑y轴翻转单元100,使y轴翻转单元100沿z轴方向升降。翻转装置10可以包括x轴翻转单元300,所述x轴翻转单元300用于沿x轴方向抓住所述对象物,以x轴为中心使所述对象物旋转。翻转装置10可以包括移送单元200,所述移送单元200沿x轴方向移送所述对象物。
[0047]
z轴升降单元500可以支撑x轴翻转单元300。z轴升降单元500可以使x轴翻转单元300沿z轴方向升降。在本公开中,所谓第一构成要素“支撑”第二构成要素,不仅是第一构成要素直接接触第二构成要素而支撑的情形,还包括第一构成要素借助于在第一构成要素与第二构成要素之间配置的第三构成要素而支撑第二构成要素的情形。
[0048]
在本实施例中,z轴升降单元500支撑y轴翻转单元100及x轴翻转单元300,使y轴翻转单元100及x轴翻转单元300沿z轴方向升降。在本实施例中,翻转装置10包括y轴翻转单元100及x轴翻转单元300,但在未图示的其他实施例中,翻转装置可以包括y轴翻转单元100而不包括x轴翻转单元300。
[0049]
检查所述对象物的朝向+z轴方向的对象面的摄像装置(图上未示出),可以配备于翻转装置10的上侧。所述摄像装置可以朝向-z轴方向而检查对象面。所述摄像装置可以沿x轴及/或y轴移动地配备。
[0050]
可以配备有使所述对象物移动到翻转装置10的传输带装置(图上未示出)。所述传输带装置可以使所述对象物从所述传输带装置与移送单元200中某一者移动到另一者。
[0051]
图2及图3是图1的y轴翻转单元100、移送单元200及驱动部160、170、180、260、270、380的立体图。在图2中,图示了作为y轴支架130的旋转轴的y轴y。y轴翻转单元100与移送单元200的结合体可以称为y轴翻转组件100、200。y轴翻转组件100、200至少可以包括一个以上的驱动部160、170、180、260、270。
[0052]
参考图2及图3,y轴翻转单元100可以以能够相对于z轴升降单元500而沿z轴方向移动的方式支撑于z轴升降单元500。y轴翻转单元100能够以y轴为中心使所述对象物旋转运转。y轴翻转单元100能够使一对y轴支架130a、130b沿y轴方向收窄或张开。y轴翻转单元100能够使一对辅助夹紧部137沿y轴方向收窄或张开。
[0053]
y轴翻转单元100包括支撑于z轴升降单元500的y轴翻转底座110。y轴翻转底座110能沿z轴方向移动地配置于z轴升降单元500。y轴翻转底座110支撑一对主体框架120a、120b。
[0054]
y轴翻转单元100包括支撑于y轴翻转底座110的主体框架120。主体框架120沿y轴方向可移动地支撑于y轴翻转底座110。一对主体框架120a、120b以可以沿y轴方向相互收窄或张开地运转的方式构成。一对主体框架120a、120b包括配置于+y轴方向的第一主体框架120a和配置于-y轴方向的第二主体框架120b。
[0055]
y轴翻转单元100包括可旋转地支撑y轴支架130的旋转接头121。y轴支架130的y轴轴杆131以y轴为中心可旋转地支撑于旋转接头121。
[0056]
y轴翻转单元100包括y轴支架130,所述y轴支架130用于在所述对象物的y轴方向上抓住所述对象物。y轴翻转单元100包括支撑于对应的一对主体框架120a、120b的一对y轴支架130a、130b。一对y轴支架130a、130b包括配置于+y轴方向的第一y轴支架130a和配置于-y轴方向的第二y轴支架130b。
[0057]
一对y轴支架130a、130b相对于一对主体框架120a、120b以y轴为中心进行旋转。在一对y轴支架130a、130b之间可以抓住所述对象物。一对y轴支架130a、130b可以沿y轴方向抓住所述对象物。
[0058]
y轴翻转单元100包括y轴轴杆131,所述y轴轴杆131能以y轴为中心可旋转地支撑于主体框架120。y轴轴杆131以沿y轴方向将对应的主体框架120贯通地方式配置。y轴轴杆131可以被主体框架120的旋转接头121可旋转地支撑。
[0059]
y轴翻转单元100可以包括引导x轴翻转单元300的z轴方向移动的x轴翻转引导件140。x轴翻转单元300可以包括引导移送单元200的z轴方向移动的移送单元引导件145。y轴翻转单元100可以包括z轴滑动器150,所述z轴滑动器150用于沿着z轴升降单元500的z轴引
导件530而沿z轴方向滑动(sliding)。
[0060]
y轴翻转单元100可以包括感知y轴支架130的既定的旋转角的位置的y轴旋转槽传感器(图上未示出)。y轴翻转单元100可以包括辅助夹紧部传感器(图上未示出),当辅助夹紧部137相对于支撑夹紧部133移动到既定的相对位置时,所述辅助夹紧部传感器(图上未示出)产生感知信号。y轴翻转单元100可以包括y轴移动传感器(图上未示出),当主体框架120相对于y轴翻转底座110移动到既定的相对位置时,y轴移动传感器(图上未示出)产生感知信号。所述y轴移动传感器可以感知一对主体框架120a、120b沿y轴方向收窄的状态及张开的状态。
[0061]
y轴翻转单元100可以包括y轴接触器传感器(图上未示出),当所述对象物接触y轴接触器135a、y轴接触器相对于支撑夹紧部133沿y轴方向移动既定距离时,所述y轴接触器传感器(图上未示出)产生感知信号。所述y轴接触器传感器可以在y轴接触器135a压缩后述的至少一个弹性构件135b时感知信号。后述的y轴移动驱动部160可以在向一对主体框架120a、120b提供彼此靠近方向的驱动力期间,当借助于所述y轴接触器传感器而感知信号时,中断驱动力的提供。
[0062]
移送单元200支撑于y轴翻转单元100。移送单元200相对于y轴翻转单元100而沿z轴方向进行移动。移送单元200使移送带210运转,从而沿x轴方向移送放在移送带210上的所述对象物。
[0063]
移送单元200可以包括一对移送部200a、200b。一对移送部200a、200b支撑于对应的所述一对主体框架。一对移送部200a、200b包括支撑于第一主体框架120a的第一移送部200a、支撑于第二主体框架120b的第二移送部200b。一对移送部200a、200b用于沿x轴方向移送所述对象物。
[0064]
移送单元200包括移送带210,所述移送带210支撑所述对象物并沿x轴方向移送所述对象物。移送单元200包括移送带轮220,所述移送带轮220借助于旋转而使移送带210运转。移送单元200包括供移送带轮220配置的移送框架230。移送框架230支撑于主体框架120。
[0065]
y轴翻转组件100、200可以包括移送单元升降传感器(图上未示出),当移送单元200相对于y轴翻转单元100移动到既定的相对位置时,移送单元升降传感器(图上未示出)产生感知信号。所述移送单元升降传感器可以感知移送单元200沿z轴方向上升的状态及下降的状态。可以配备与一对移送部200a、200b对应的一对移送单元升降传感器。
[0066]
翻转装置10包括y轴移动驱动部160,所述y轴移动驱动部160提供一对主体框架120a、120b相对于y轴翻转底座110而沿y轴方向进行移动的驱动力。y轴移动驱动部160支撑于y轴翻转单元100。y轴移动驱动部160可以包括电动机161、将电动机161的驱动力传递给一对主体框架120a、120b的驱动力传递部163。
[0067]
在一个实施例中,驱动力传递部163可以包括:带轮163a,所述带轮163a固定于电动机161的旋转轴而进行旋转;带163b,所述带163b缠绕于带轮163a而接受传递的旋转力;带轮163c,所述带轮163c挂接于带163b而接受传递的旋转力。驱动力传递部163可以包括导螺杆(lead screw)163d,所述导螺杆163d结合于带轮163c,与带轮163c一体旋转。导螺杆163d向一个方向旋转时,一对主体框架120a、120b可以沿着导螺杆163d移动而沿y轴方向彼此收窄,导螺杆163d向另一方向旋转时,一对主体框架120a、120b可以沿着导螺杆163d移动
而沿y轴方向彼此远离。
[0068]
翻转装置10包括y轴支架旋转驱动部170,所述y轴支架旋转驱动部170提供y轴支架130相对于主体框架120进行旋转的驱动力。y轴支架旋转驱动部170可以提供使y轴轴杆131旋转的驱动力。y轴支架旋转驱动部170支撑于y轴翻转单元100。y轴支架旋转驱动部170可以包括电动机171、将电动机171的驱动力传递给一对y轴支架130a、130b的驱动力传递部173a、173b、173c。
[0069]
驱动力传递部173a、173b、173c可以包括将电动机171的旋转力传递给第一驱动力传递部173b及第二驱动力传递部173c的基础驱动力传递部173a。驱动力传递部173a、173b、173c可以包括:第一驱动力传递部173b,所述第一驱动力传递部173b从基础驱动力传递部173a接受传递的旋转力并传递给第一y轴支架130a;第二驱动力传递部173c,所述第二驱动力传递部173c从基础驱动力传递部173a接受传递的旋转力并传递给第二y轴支架130b。
[0070]
在一个实施例中,基础驱动力传递部173a可以包括:带轮173a1,所述带轮173a1固定于电动机171的旋转轴而旋转;带173a2,所述带173a2缠绕于带轮173a1并接受传递的旋转力;及带轮173a3,所述带轮173a3挂接于带173a2而接受传递的旋转力。基础驱动力传递部173a可以包括齿轴(serrated shaft)173a4,所述齿轴173a4结合于带轮173a3,与带轮173a3一体旋转。电动机171及基础驱动力传递部173a可以支撑于y轴翻转底座110。
[0071]
在一个实施例中,第一驱动力传递部173b可以包括带轮173b1,所述带轮173b1与齿轴173a4结合而接受传递的旋转力,且能够沿着齿轴173a4沿y轴方向移动。第一驱动力传递部173b可以包括:带173b2,所述带173b2缠绕于带轮173b1,接受传递的旋转力;带轮173b3,所述带轮173b3挂接于带173b2而接受传递的旋转力,并使第一y轴支架130a旋转。第一驱动力传递部173b可以包括引导轮173b4,所述引导轮173b4接触带173b2,以便引导带173b2的位置。第一驱动力传递部173b支撑于第一主体框架120a。
[0072]
在一个实施例中,第二驱动力传递部173c可以包括带轮173c1,所述带轮173c1与齿轴173a4结合而接受传递的旋转力,且能够沿着齿轴173a4沿y轴方向移动。第二驱动力传递部173c可以包括:带173c2,所述带173c2缠绕于带轮173c1而接受传递的旋转力;带轮173c3,所述带轮173c3挂接于带173c2而接受传递的旋转力,使第二y轴支架130b旋转。第二驱动力传递部173c可以包括引导轮173c4,所述引导轮173c4接触带173c2,以便引导带173c2的位置。第二驱动力传递部173c支撑于第二主体框架120b。
[0073]
翻转装置10包括提供使辅助夹紧部137运转的驱动力的辅助夹紧部驱动部180。可以具备分别提供使一对辅助夹紧部运转的驱动力的一对辅助夹紧部驱动部180a、180b。辅助夹紧部驱动部180可以支撑于主体框架120。
[0074]
翻转装置10包括移送单元升降驱动部260,所述移送单元升降驱动部260提供移送单元200相对于y轴翻转单元100沿z轴方向进行移动的驱动力。移送单元升降驱动部260可以支撑于主体框架120。例如,移送单元升降驱动部260可以包括沿上下方向驱动杆的汽缸。
[0075]
移送单元升降驱动部260包括分别使一对移送部200a、200b运转的一对移送部升降驱动部260a、260b。移送部升降驱动部260a、260b支撑于主体框架120。移送部升降驱动部260a、260b提供移送部200a、200b相对于主体框架120沿z轴方向进行移动的驱动力。一对移送部升降驱动部260a、260b包括使第一移送部200a升降的第一移送部升降驱动部260a、使第二移送部200b升降的第二移送部升降驱动部260b。
[0076]
翻转装置10包括提供移送带210运转的驱动力的带驱动部270。带驱动部270可以支撑于移送框架230。例如,带驱动部270可以包括电动机271、将电动机271的驱动力传递给移送带210的带及带轮272。
[0077]
带驱动部270包括分别使一对移送部200a、200b的移送带210运转的一对带驱动部270a、270b。一对带驱动部270a、270b包括使第一移送部200a的移送带210运转的第一带驱动部270a、使第二移送部200b的移送带210运转的第二带驱动部270b。
[0078]
翻转装置10可以包括x轴翻转升降驱动部380,所述x轴翻转升降驱动部380提供x轴翻转单元300相对于y轴翻转单元100沿z轴方向进行移动的驱动力。x轴翻转升降驱动部380可以支撑于y轴翻转底座110。x轴翻转升降驱动部380可以包括电动机381、将电动机381的驱动力传递给x轴翻转单元300的驱动力传递部383。
[0079]
在一个实施例中,驱动力传递部383可以包括:带轮383a,所述带轮383a固定于电动机381的旋转轴而进行旋转;带383b,所述带383b缠绕于带轮383a而接受传递的旋转力;带轮383c,所述带轮383c挂接于带383b而接受传递的旋转力。驱动力传递部383可以包括导螺杆383d,所述导螺杆383d结合于带轮383c而与带轮383c一体旋转。导螺杆383d向一个方向旋转时,x轴翻转底座310可以沿着导螺杆383d而向+z轴方向移动,导螺杆383d向另一方向旋转时,x轴翻转底座310可以沿着导螺杆383d而向-z轴方向移动。
[0080]
图4是图1的x轴翻转单元300及驱动部360、370的立体图。在图4中图示了作为x轴支架330的旋转轴的x轴(x)。
[0081]
参考图4,x轴翻转单元300可以以能够相对于y轴翻转单元100而沿z轴方向移动的方式支撑于y轴翻转单元100。x轴翻转单元300能够以x轴为中心使所述对象物旋转的运转。x轴翻转单元300能够使一对x轴支架330a、330b沿x轴方向收窄或张开。x轴翻转单元300能够相对于y轴翻转单元100沿z轴方向移动。
[0082]
x轴翻转单元300包括支撑于z轴升降单元500的x轴翻转底座310。x轴翻转底座310能够以y轴翻转单元100为媒介支撑于z轴升降单元500。x轴翻转底座310可以支撑于y轴翻转底座110。x轴翻转底座310可以相对于y轴翻转单元100而沿z轴方向可移动地配置。
[0083]
x轴翻转单元300包括支撑于x轴翻转底座310的侧框架320。侧框架320相对于x轴翻转底座310沿x轴方向可移动地被支撑。一对侧框架320沿x轴方向彼此收窄或张开地运转。一对侧框架320包括配置于+x轴方向的第一侧框架320a和配置于-x轴方向的第二侧框架320b。
[0084]
x轴翻转单元300包括可旋转地支撑x轴支架330的旋转接头321。x轴支架330的x轴轴杆331可以以x轴为中心可旋转地支撑于旋转接头321。
[0085]
x轴翻转单元300包括x轴支架330,所述x轴支架330用于在所述对象物的x轴方向上抓住所述对象物。x轴翻转单元300包括支撑于对应的一对侧框架320a、320b的一对x轴支架330a、330b。一对x轴支架330a、330b包括配置于+x轴方向的第一x轴支架330a、配置于-x轴方向的第二x轴支架330b。
[0086]
一对x轴支架330a、330b相对于一对侧框架320a、320b而以x轴为中心进行旋转。并且能够在一对x轴支架330a、330b之间抓住对象物。
[0087]
x轴翻转单元300包括x轴轴杆331,所述x轴轴杆331以x轴为中心可旋转地支撑于侧框架320。x轴轴杆331可以以沿x轴方向贯通对应的侧框架320的方式配置。x轴轴杆331可
以被侧框架320的旋转接头321可旋转地支撑。
[0088]
x轴支架330以x轴为中心可旋转地支撑于侧框架320。x轴支架330包括x轴接触器335,所述x轴接触器335具有接触面335a,所述接触面335a沿x轴方向接触所述对象物。x轴接触器335支撑于x轴轴杆331。x轴接触器335配置于x轴上。x轴接触器335以x轴贯通x轴接触器335的方式配置。
[0089]
x轴支架330可以包括第一夹紧部336,所述第一夹紧部336的+z轴方向部分比-z轴方向部分沿x轴方向凸出地形成。第一夹紧部336支撑于x轴轴杆331。第一夹紧部336配置于x轴接触器335的一侧。第一夹紧部336配置于以x轴接触器335为基准垂直于x轴的方向。
[0090]
第一夹紧部336的+z轴方向部分沿x轴方向凸出,形成第一凸出面336a,第一夹紧部336的-z轴方向部分沿x轴方向凹陷而形成第一凹陷面336c。第一夹紧部336形成连接第一凸出面336a与第一凹陷面336c的第一倾斜面336b。可以以x轴接触器335为中心而在两侧配备一对第一夹紧部336。
[0091]
x轴支架330可以包括-z轴方向部分比+z轴方向部分沿x轴方向凸出地形成的第二夹紧部337。第二夹紧部337支撑于x轴轴杆331。第二夹紧部337配置于第一夹紧部336的一侧。第二夹紧部337配置于以第一夹紧部336为基准垂直于x轴的方向。
[0092]
x轴接触器335、第一夹紧部336及第二夹紧部337可以沿着垂直于x轴的某一方向排列。x轴接触器335、第一夹紧部336及第二夹紧部337可以沿着y轴方向排列。
[0093]
第二夹紧部337的+z轴方向部分沿着x轴方向凸出而形成第二凸出面337a,第二夹紧部337的-z轴方向部分沿着x轴方向凹陷而形成第二凹陷面337c。第二夹紧部337形成连接第二凸出面337a与第二凹陷面337c的第二倾斜面337b。可以以x轴接触器335为中心而在两侧配备一对第二夹紧部337。
[0094]
x轴翻转单元300可以包括移送限位部340,所述移送限位部340限制借助于移送单元200而移动的所述对象物的移动。移送限位部340可以只配置于一对x轴支架330a、330b中某一者。在本实施例中,移送限位部340固定于第一x轴支架330a。移送限位部340可以从第一x轴支架330a向+z轴方向凸出,形成朝向-x轴方向的表面。借助于移送单元200而沿x轴方向移动的所述对象物能够被移送限位部340卡住而停止沿x轴方向的移动。
[0095]
x轴翻转单元300可以包括x轴翻转滑动器350,所述x轴翻转滑动器350沿着y轴翻转单元100的x轴翻转引导件140而沿z轴方向滑动。一对x轴翻转滑动器350可以沿x轴方向彼此相向地构成。
[0096]
x轴翻转单元300可以包括感知x轴支架330既定旋转角的位置的x轴旋转槽传感器(图上未示出)。x轴翻转单元300可以包括x轴接触器传感器(图上未示出),当所述对象物接触x轴接触器335时,x轴接触器传感器(图上未示出)产生感知信号。x轴翻转单元300可以包括x轴移动传感器(图上未示出),当侧框架320相对于x轴翻转底座310移动到既定的相对位置时,所述x轴移动传感器(图上未示出)产生感知信号。所述x轴移动传感器可以感知一对侧框架320a、320b沿x轴方向收窄的状态及张开的状态。
[0097]
x轴翻转单元300可以包括z轴移动传感器391a、391b(参考图3),当x轴翻转底座310相对于y轴翻转底座110移动到既定的相对位置时,所述z轴移动传感器391a、391b产生感知信号。如果x轴翻转底座310相对于y轴翻转底座110配置于既定的相对位置,则固定于x轴翻转底座310的标靶(图上未示出)被z轴移动传感器391a、391b所感知。
[0098]
翻转装置10包括x轴移动驱动部360,所述x轴移动驱动部360提供一对侧框架320a、320b相对于x轴翻转底座310沿x轴方向移动的驱动力。x轴移动驱动部360支撑于x轴翻转单元300。x轴移动驱动部360可以包括电动机361、将电动机361的驱动力传递给一对侧框架320a、320b的驱动力传递部363。
[0099]
在一个实施例中,驱动力传递部363可以包括固定于电动机361的旋转轴进行旋转的带轮(图上未示出)、缠绕于所述带轮而接受传递的旋转力的带363b、挂接于带363b而接受传递的旋转力的带轮363c。驱动力传递部363可以包括导螺杆363d,所述导螺杆363d结合于带轮363c而与带轮363c一体旋转。导螺杆363d向一个方向旋转时,一对侧框架320a、320b可以沿着导螺杆363d移动而沿x轴方向彼此收窄,导螺杆363d向另一方向旋转时,一对侧框架320a、320b可以沿着导螺杆363d移动而沿x轴方向彼此远离。
[0100]
翻转装置10包括x轴支架旋转驱动部370,所述x轴支架旋转驱动部370提供x轴支架330相对于侧框架320进行旋转的驱动力。x轴支架旋转驱动部370可以提供使x轴轴杆331旋转的驱动力。x轴支架旋转驱动部370支撑于x轴翻转单元300。x轴支架旋转驱动部370可以包括电动机371、将电动机371的驱动力传递给一对x轴支架330a、330b的驱动力传递部373a、373b、373c。
[0101]
驱动力传递部373a、373b、373c可以包括将电动机371的旋转力传递给第一驱动力传递部373b及第二驱动力传递部373c的基础驱动力传递部373a。驱动力传递部373a、373b、373c可以包括从基础驱动力传递部373a接受传递的旋转力并传递给第一x轴支架330a的第一驱动力传递部373b、从基础驱动力传递部373a接受传递的旋转力并传递给第二x轴支架330b的第二驱动力传递部373c。
[0102]
在一个实施例中,基础驱动力传递部373a可以包括固定于电动机371的旋转轴而旋转的带轮373a1、缠绕于带轮373a1而接受传递的旋转力的带373a2及挂接于带373a2而接受传递的旋转力的带轮373a3。基础驱动力传递部373a可以包括齿轴373a4,所述齿轴373a4结合于带轮373a3,与带轮373a3一体进行旋转。电动机371及基础驱动力传递部373a可以支撑于x轴翻转底座310。
[0103]
在一个实施例中,第一驱动力传递部373b可以包括带轮373b1,所述带轮373b1与齿轴373a4结合而接受传递旋转力,且能够沿着齿轴373a4而沿x轴方向移动。第一驱动力传递部373b可以包括缠绕于带轮373b1而接受传递的旋转力的带373b2、挂接于带373b2而接受传递的旋转力并使第一x轴支架330a旋转的带轮373b3。第一驱动力传递部373b可以包括引导轮373b4,所述引导轮373b4接触带373b2,以便引导带373b2的位置。第一驱动力传递部373b支撑于第一侧框架320a。
[0104]
在一个实施例中,第二驱动力传递部373c可以包括带轮(图上未示出),所述带轮(图上未示出)与齿轴373a4结合而接受传递的旋转力,且能够沿着齿轴373a4而沿x轴方向移动。第二驱动力传递部373c可以以第一驱动力传递部373b的方式构成,使第二x轴支架330b旋转。第二驱动力传递部373c支撑于第二侧框架320b。
[0105]
图5及图6是图1的z轴升降单元500及z轴升降驱动部560的立体图。参考图5及图6,z轴升降单元500可以支撑于翻转装置10外部的环境(例如,外部的地面或墙体等)。y轴翻转单元100可以相对于z轴升降单元500而沿z轴方向升降。
[0106]
z轴升降单元500可以包括支撑于外部环境的支撑框架510。z轴升降单元500可以
包括在支撑框架510形成的z轴引导件530。z轴引导件530引导y轴翻转单元100的z轴方向移动。
[0107]
z轴升降单元500可以包括升降传感器591a、591b,在y轴翻转底座110相对于z轴升降单元500而移动到既定的相对位置时,所述升降传感器591a、591b产生感知信号。如果y轴翻转底座110相对于z轴升降单元500而配置于既定的相对位置,则固定于y轴翻转底座110的标靶591t被z轴移动传感器391a、391b感知(参考图1)。
[0108]
翻转装置10可以包括z轴升降驱动部560,所述z轴升降驱动部560提供y轴翻转单元100及x轴翻转单元300相对于z轴升降单元500沿z轴方向移动的驱动力。z轴升降驱动部560可以支撑于z轴升降单元500。z轴升降驱动部560可以包括电动机561、将电动机561的驱动力传递给y轴翻转单元100的驱动力传递部563。
[0109]
在一个实施例中,驱动力传递部563可以包括固定于电动机561的旋转轴而旋转的带轮563a、缠绕于带轮563a而接受传递的旋转力的带563b、挂接于带563b而接受传递的旋转力的带轮563c。驱动力传递部563可以包括导螺杆563d,所述导螺杆563d结合于带轮563c而与带轮563c一体旋转。导螺杆563d向一个方向旋转时,y轴翻转底座110可以沿着导螺杆563d而向+z轴方向移动,导螺杆563d向另一方向旋转时,y轴翻转底座110可以沿着导螺杆563d而向-z轴方向移动。
[0110]
图7至图11作为依次显示翻转装置10的根据一实施例的运转过程的立体图,为了说明的便利,在一些图中省略了x轴翻转单元300及z轴升降单元500。
[0111]
参考图7,对象物m进入翻转装置10。移送单元200的移送带210的上侧面向+x轴方向移动(参考箭头mc1)。因此,放在移送带210上的对象物m向+x轴方向移动(参考箭头in)。
[0112]
参考图7及图8,x轴翻转单元300处在相对于y轴翻转单元100下降既定范围的状态,在对象物m移送至翻转装置10内的正确位置的路径上,不会被x轴翻转单元300卡住,当翻转装置10到达正确位置时,被x轴翻转单元300的移送限位部340卡住。参考图8,对象物m在既定的正确位置被移送限位部340卡住,无法进一步向+x轴方向移动而停止。然后,一对侧框架320a、320b彼此沿x轴方向张开,相对于y轴翻转单元100而向+z轴方向移动,保持与对象物m隔开的状态。
[0113]
参考图9,y轴翻转单元100的一对主体框架120a、120b沿y轴方向彼此收窄(参照箭头dy1)。其中,y轴支架130的支撑夹紧部133支撑对象物m的下侧面。
[0114]
111参考图10,移送单元200a、200b沿着主体框架120向-z轴方向移动(参考箭头dc1)。由此,对象物m旋转时,移送单元200可以不受干扰。
[0115]
参考图10,y轴支架130的支撑夹紧部133支撑对象物m的下侧,在y轴接触器135a接触对象物m的y轴方向两侧的状态下,借助于所述摄像装置,检查对象物m的朝向+z轴方向的对象面a。其中,一对辅助夹紧部137处于比一对支撑夹紧部133彼此更张开的状态,辅助夹紧部137不遮挡对象面a的+z轴方向,对象面a的所有面可以被检查。对象面a的检查可以在移送单元200a、200b向-z轴方向下降运转中执行,此时,可以缩短检查时间。
[0116]
参考图11,对象面a检查后,为了检查对象面b1、b2,一对辅助夹紧部137以比一对支撑夹紧部133彼此更收窄的状态(参考箭头ds1)移动。支撑夹紧部133与辅助夹紧部137抓住对象物m的上下侧,从而对象物m可以稳定地旋转。
[0117]
图12是图2的y轴支架130及辅助夹紧部驱动部180的旋转杆182c的分解立体图。图
13是图12的y轴旋转杆182c、轴杆131及旋转销132的组装状态的立体图。
[0118]
参考图12及图13,以一对y轴支架130中某一y轴支架130为基准,具体说明如下。在某一y轴支架130中,第一方向y1是指朝向其余一个y轴支架的方向,第二方向y2是指第一方向y1的相反方向。
[0119]
y轴支架130包括y轴轴杆131,所述y轴轴杆131以y轴为中心可旋转地支撑于主体框架120。在y轴轴杆131的第一方向y1末端可以固定有支撑夹紧部133。y轴轴杆131与后述的旋转杆182c结合。在y轴轴杆131结合有后述的旋转销132。
[0120]
y轴支架130包括支撑于y轴轴杆131的支撑夹紧部133。支撑夹紧部133沿y轴方向y1凸出而能够卡住所述对象物的一端。支撑夹紧部133以y轴接触器135a为基准,在-z轴方向侧沿y轴方向凸出而向+z轴方向形成能接触对象物m的支撑面133b。支撑夹紧部133向第一方向y1形成凸出末端133a。在本实施例中,支撑夹紧部133结合有多个部件133a、133b而形成,但不限于此。
[0121]
118在支撑夹紧部133的第二方向y2侧固定有y轴轴杆131。旋转杆182c可以沿y轴方向贯通支撑夹紧部133。在支撑夹紧部133的第二方向y2侧可以配置有限制部135d。支撑夹紧部133可以引导(guide)弹性夹紧部135的移动方向。支撑夹紧部133可以引导辅助夹紧部137的移动方向。
[0122]
y轴支架包括弹性夹紧部135,所述弹性夹紧部135如果接触对象物m而被按压,则产生弹力。弹性夹紧部135包括y轴接触器135a,所述y轴接触器135a沿y轴方向接触对象物m。y轴接触器135a接触对象物m时使弹性构件135b压缩。y轴接触器135a支撑于y轴轴杆131。例如,y轴接触器135a可以以支撑夹紧部133为媒介支撑于y轴轴杆131。
[0123]
y轴接触器135a包括朝向第一方向y1的接触面135a1。接触面135a1能够沿第一方向y1接触对象物m。y轴接触器135a包括形成第一方向的部分的前方部135a2。在前方部135a2的第一方向y1的侧面配置有接触面135a1。y轴接触器135a包括引导辅助夹紧部137的y轴方向移动的引导部135a3。引导部135a3沿y轴方向延长。引导部135a3可以与辅助夹紧部137的沿y轴方向延长的槽137h吻合。一个y轴接触器135a可以包括相互隔开的一对引导部135a3。
[0124]
弹性夹紧部135包括至少一个弹性构件135b,所述至少一个弹性构件135b沿y轴方向提供弹力。弹性构件135b以当y轴接触器135a接触对象物m时被弹性压缩的方式构成。至少一个弹性构件135b可以包括将y轴置于之间的一对弹性构件135b。
[0125]
y轴支架130包括支撑弹性构件135b一端的弹性构件支撑部136。弹性构件135b的第二方向y2末端支撑于弹性构件支撑部136。弹性构件135b的另一端连接于y轴接触器135a。弹性构件135b的第一方向y1末端连接于y轴接触器135a。
[0126]
弹性构件支撑部136固定于支撑夹紧部133。在本实施例中,弹性构件支撑部136在支撑夹紧部133一体形成,但不限于此。
[0127]
y轴支架130包括引导部135c,所述引导部135c在一端固定有y轴接触器135a。y轴接触器135a固定于引导部135c的第一方向y1末端。引导部135c以只能沿y轴方向移动的方式配置于支撑夹紧部133。可以配备一对引导部135c。引导部135c以沿y轴方向贯通支撑夹紧部133的方式配置。在支撑夹紧部133可以形成有供引导部135c沿第二方向y2插入的孔136h。可以在弹性构件支撑部136形成有孔136h。可以形成有与一对引导部135c对应的一对
孔136h。
[0128]
y轴支架130包括固定于引导部135c的限制部135d。限制部135d挂接于支撑夹紧部133或与支撑夹紧部133一体运动的部件,限制引导部135c相对于支撑夹紧部133向作为引导部135c的所述一端方向的第一方向y1的可移动范围。在本实施例中,限制部135d以卡住支撑夹紧部133的第二方向y2侧面的方式构成。在未图示的另一实施例中,限制部135d可以以卡住与支撑夹紧部133一体运动的y轴轴杆131等部件的方式构成。在本公开中,所谓“一体运动”,是指多个构成要素在不变更彼此相对位置的状态下一同运动。
[0129]
y轴支架130包括辅助夹紧部137,所述辅助夹紧部137以y轴接触器135a为基准在+z轴方向侧沿y轴方向移动。辅助夹紧部137以能够相对于支撑夹紧部133沿y轴方向移动的构成。辅助夹紧部137与y轴轴杆131一体进行旋转。在本公开中,所谓“一体旋转”,是指多个构成要素在不变更彼此相对位置的状态下一同旋转。辅助夹紧部137沿第一方向y1形成凸出末端137a。
[0130]
辅助夹紧部137沿y轴方向进行移动而使对象物m的另一端卡住或解除卡住。对象物m的一端被支撑夹紧部133卡住。在此提到的对象物m的一端及另一端是指垂直于y轴的两个方向(z轴方向)的末端。
[0131]
图14a是沿着图8的线s1-s1'截断翻转装置10的部分剖面图。图14b是沿着图9的线s2-s2'截断翻转装置10的部分剖面图。图14c是沿着图11的线s3-s3'截断翻转装置10的部分剖面图。
[0132]
参考图12至图14c,辅助夹紧部137具有卡住状态(参考图14c)和解除卡住状态(参考图14a及图14b),所述卡住状态是辅助夹紧部137向y轴方向中的第一方向y1移动,向-z轴方向接触对象物m的状态,所述解除卡住状态是辅助夹紧部137向作为第一方向y1相反方向的第二方向y2移动而解除与对象物m的接触的状态。辅助夹紧部137在至少一个弹性构件135b被弹性压缩的状态下,以y轴接触器135a的接触对象物m的面135a1为基准,所述卡住状态(参照图14c)的辅助夹紧部137的凸出末端137a位于第一方向y1侧,所述解除卡住状态(参考图14b)的辅助夹紧部137的凸出末端137a位于第二方向y2侧。
[0133]
辅助夹紧部137在至少一个弹性构件135b被弹性压缩的状态下,以y轴接触器135a的接触所述对象物m的面135a1为基准,支撑夹紧部133的凸出末端133a位于第一方向y1侧(参考图14b及图14c)。
[0134]
参考图14a至图14c,在辅助夹紧部137相对于支撑夹紧部133向第一方向y1移动的状态下,在辅助夹紧部137与支撑夹紧部133之间形成有供y轴接触器135a的前方部135a2插入的间隙137g。在辅助夹紧部137相对于支撑夹紧部133向第一方向y1移动的状态下,辅助夹紧部137包括夹紧面137b,所述夹紧面137b向-z轴方向接触对象物m。在辅助夹紧部137相对于支撑夹紧部133向第一方向y1移动的状态下,辅助夹紧部137包括卡止面137c,所述卡止面137c卡住y轴接触器135a的前方部135a2。当辅助夹紧部137相对于支撑夹紧部133沿y轴方向移动时,辅助夹紧部137包括沿着支撑夹紧部133的表面进行滑动的滑动面137d。
[0135]
翻转装置10包括辅助夹紧部驱动部180,所述辅助夹紧部驱动部180提供辅助夹紧部137相对于y轴轴杆131沿y轴方向移动的驱动力。辅助夹紧部驱动部180可以包括提供驱动力的汽缸181、将汽缸181的驱动力传递给y轴支架130的驱动力传递部182。
[0136]
在一实施例中,驱动力传递部182可以包括接受传递的汽缸181的驱动力并沿y轴
方向移动的汽缸杆182a。驱动力传递部182可以包括固定于汽缸杆182a而与汽缸杆182a一体运动的连接杆182b。驱动力传递部182可以包括与连接杆182b连接的旋转杆182c。旋转杆182c以随着连接杆182b的y轴方向移动而一同沿y轴方向移动的方式连接于连接杆182b,并以y轴为中心而能够旋转地连接于连接杆182b。
[0137]
参考图12至图14c,辅助夹紧部驱动部180包括旋转杆182c,所述旋转杆182c在一端固定辅助夹紧部137。辅助夹紧部137可以固定于旋转杆182c的第一方向y1末端。旋转杆182c将辅助夹紧部驱动部180的驱动力传递给辅助夹紧部137。旋转杆182c可以与辅助夹紧部137一同相对于支撑夹紧部133沿y轴方向移动。
[0138]
旋转杆182c与y轴轴杆131一体旋转,并以相对于y轴轴杆131沿y轴方向可移动地构成。旋转杆182c可以沿y轴方向贯通y轴轴杆131的配置。在旋转杆182c上形成有沿着垂直于y轴的方向贯通的引导孔182ch。引导孔182ch沿着y轴方向长长地延长。
[0139]
y轴支架130可以包括固定于y轴轴杆131的旋转销132。旋转销132插入于引导孔182ch。旋转销132沿着引导孔182ch沿y轴方向进行相对移动。当从图14a及图14b的状态变更为图14c的状态时,当旋转杆182c相对于y轴轴杆131而向第一方向移动时,旋转销132沿着引导孔182ch而向第二方向y2相对移动。另一方面,当y轴轴杆131以y轴为中心进行旋转时,借助于旋转销132,y轴轴杆131及旋转杆182c可以一体旋转。
[0140]
参考图14a时,对象物m的下侧面被移送单元200的移送带210支撑。参考图14b时,主体框架120向第一方向移动(参考箭头dy1),支撑夹紧部133的支撑面133b支撑对象物m的下侧面。参考图14c,借助于辅助夹紧部驱动部180的驱动力,旋转杆182c相对于y轴轴杆131向第一方向y1移动(参考箭头dc),辅助夹紧部137的夹紧面137b接触对象物m的上侧面。
[0141]
图15a是沿着图8的线s4-s4'截断翻转装置10的部分剖面图。图15b是沿着图9的线s5-s5'截断翻转装置10的部分剖面图。
[0142]
参考图15a及图15b,辅助夹紧部137可以包括覆盖弹性构件135b至少一部分的罩部137e。罩部137e可以覆盖弹性构件支撑部136。辅助夹紧部137可以包括配置于引导部135c与支撑夹紧部133之间的套筒138。引导部135c可以使套筒138沿y轴方向滑动。
[0143]
参考图15a,图示了对象物m接触y轴接触器135a,y轴接触器135a未被对象物向y轴方向按压的状态。其中,限制部135d卡住于支撑夹紧部133,y轴接触器135a成为相对于支撑夹紧部133而向第一方向y1最大限度移动的状态。
[0144]
参考图15b,主体框架120向第一方向移动(参考箭头dy1),弹性夹紧部135被对象物m向第二方向y2按压,弹性构件135b被压缩。其中,限制部135d从支撑夹紧部133向第二方向y2隔开。
[0145]
图16至图18作为依次显示在图11的状态之后,根据一实施例的翻转装置10的运转过程的立体图,为了说明的便利,在一些图中省略了x轴翻转单元300及z轴升降单元500。
[0146]
参考图16,y轴支架130在抓住对象物m的状态下,使对象物m以y轴为中心而向某一旋转方向ry1旋转,从而相对于对象面a垂直的对象面b1朝向+z轴方向。其中,对象面b1被所述摄像装置检查。
[0147]
参考图17a及图17b,y轴支架130通过使对象物m以y轴为中心旋转不足90度,使得相对于对象面b1倾斜不足90度的对象面b1a、b1b也可以接受检查。当对象物m的角部存在曲率时,这种检查方式非常有用。例如,参考图17a,使y轴支架130向某一旋转方向ry2旋转,可
以检查对象面b1a,参考图17b,使y轴支架130向相反旋转方向ry3旋转而可以检查对象面b1b。
[0148]
参考图18,y轴支架130使对象物m以y轴为中心而向某一旋转方向ry4旋转,从而作为对象面b1相反面的对象面b2朝向+z轴方向。其中,对象面b2被所述摄像装置检查。
[0149]
图19a是沿x轴方向观察图10的状态的翻转装置10的立面图。图19b是沿x轴方向观察图16的状态的翻转装置10的立面图。图19c是沿x轴方向观察图17a的状态的翻转装置10的立面图。
[0150]
参考图19a至图19c,摄像装置30配置于从地面gl沿z轴方向离开既定距离(lo+lg)的水平面io上,摄像装置30的检查方向id成为-z轴方向。摄像装置30可以沿x轴方向及y轴方向移动,检查对象物m的所述对象面。
[0151]
摄像装置30从对象物m的朝向+z轴方向的对象面保持既定距离lo。为此,可以将所述对象面与地面gl之间的距离保持在既定距离lg。z轴升降单元500为了既定地保持所述距离lg,使y轴翻转单元100沿z轴方向移动。
[0152]
参考图19a,图示了在检查对象面a期间,y轴翻转单元100的基准支点与地面gl之间的距离l1。
[0153]
参考图19b,对象面b1相对于y轴翻转单元100的相对位置高于了对象面b1相对于y轴翻转单元100的相对位置,因此,z轴升降单元500可以使y轴翻转单元100向下侧移动既定距离(参考箭头dz1)。其中,y轴翻转单元100与地面gl之间的距离l2比距离l1短。
[0154]
参考图19c,对象面b1a相对于y轴翻转单元100的相对位置比对象面b1相对于y轴翻转单元100的相对位置低,因此,z轴升降单元500可以使y轴翻转单元100向上侧移动既定距离(参考箭头dz2)。其中,y轴翻转单元100与地面gl之间的距离l3比距离l2长,但比距离l1短。
[0155]
图20至图24作为依次显示翻转装置10在图18的状态根据一实施例的运转过程的立体图,为了说明的便利,在一些图中省略了y轴翻转单元100及z轴升降单元500。
[0156]
参考图20,y轴支架130通过使对象物m旋转(参考箭头ry5)而将对象物配置成对象面a朝向+z轴方向。一对侧框架320a、320b在此之前保持彼此沿x轴方向张开的状态,而在此时,一对x轴支架330a、330b彼此沿x轴方向收窄,抓住对象物m(参考箭头dx1)。
[0157]
参考图21,辅助夹紧部137相对于支撑夹紧部133向第二方向移动,成为所述解除卡住状态(参考箭头ds2),一对主体框架120a、120b彼此张开,一对y轴支架130a、130b从对象物m隔开(参考箭头dy2)。由此,x轴支架330使对象物m旋转时,y轴支架130不会干涉。
[0158]
参考图22,x轴支架330在抓住对象物m的状态下,使对象物m以x轴为中心而向某一旋转方向rx1旋转,从而相对于对象面a垂直的对象面b3朝向+z轴方向。此时,对象面b3被所述摄像装置检查。
[0159]
参考图23a及图23b,x轴支架330通过使对象物m以x轴为中心旋转不足90度,使得相对于对象面b3倾斜不足90度的对象面b3a、b3b也可以接受检查。当对象物m的角部有曲率时,这种检查方式非常有用。例如,参考图23a,使x轴支架330向某一旋转方向rx2旋转,可以检查对象面b3a,参考图23b,使x轴支架330向相反旋转方向rx3旋转,可以检查对象面b3b。
[0160]
参考图24,x轴支架330使对象物m以x轴为中心而向某一旋转方向rx4旋转,从而对象面b3的相反面的对象面b4朝向+z轴方向。此时,对象面b4被所述摄像装置检查。
[0161]
图25a是沿x轴方向观察图22的状态的翻转装置10的立面图。图25b是沿x轴方向观察图23a的状态的翻转装置10的立面图。
[0162]
参考图25a及图25b,摄像装置30从对象物m的朝向+z轴方向的对象面保持既定的距离lo。为此,可以将所述对象面与地面gl之间的距离保持在既定距离lg。z轴升降单元500为了既定地保持所述距离lg,使x轴翻转单元300沿z轴方向移动。在本实施例中,z轴升降单元500为了既定地保持所述距离lg,使y轴翻转单元100及x轴翻转单元300一体沿z轴方向移动。
[0163]
参考图25a,由于对象面b3相对于x轴翻转单元300的相对位置高于对象面b3相对于x轴翻转单元300的相对位置,z轴升降单元500可以使x轴翻转单元300向下侧移动既定距离(参考箭头dz1)。
[0164]
161图25a的距离l4图示为y轴翻转单元100的基准支点与地面gl之间的距离,在图19a中,y轴翻转单元100的所述基准支点与所述y轴之间的距离,可以与图25a中的y轴翻转单元100的所述基准支点与所述x轴之间的距离相同。此时,距离l4比距离l1短。
[0165]
参考图25b,由于对象面b3a相对于y轴翻转单元100的相对位置低于对象面b3a相对于x轴翻转单元300的相对位置,z轴升降单元500可以使x轴翻转单元300向上侧移动既定距离(参考箭头dz2)。在此,距离l5比距离l4长,但比距离l1短。
[0166]
图26至图29是依次显示翻转装置10在图24的状态之后,根据一实施例的运转过程的立体图。
[0167]
参考图26,通过x轴支架330使对象物m旋转(参考箭头rx5),而将对象物配置成作为对象面a的相反面的对象面c朝向+z轴方向。通过一对侧框架320a、320b彼此沿y轴方向收窄,一对y轴支架130a、130b抓住对象物m(参考箭头dy1)。
[0168]
参考图27,一对侧框架320a、320b彼此张开,一对x轴支架330a、330b从对象物m隔开(参考箭头dx2)。此时,可以检查作为对象面a的相反侧面的对象面c。
[0169]
参考图28,x轴翻转单元300相对于y轴翻转单元100向-z轴方向移动既定距离(参考箭头de1)。此时,x轴翻转单元300相对于y轴翻转单元100充分下降,移送限位部340也配置于比对象物行进路径的更下侧。另外,移送单元200相对于y轴翻转单元100而向+z轴方向移动既定距离(参考箭头dc2)。此时,移送单元200的移送带210支撑对象物m的下侧面。
[0170]
参考图29,一对主体框架120a、120b沿y轴方向彼此张开,只有移送单元200支撑对象物m。此时,一对移送部200a、200b的移送带210的上侧面向+x轴方向移动(参考箭头mc1)。因此,借助于移送单元200,对象物m从翻转装置10排出(参考箭头out)。
[0171]
图30是利用本公开一个实施例的翻转装置的对象物检查方法的流程图。在图30所示的流程图中,依次说明了流程步骤、方法步骤、算法等,但这些流程、方法及算法可以构成得按任意适合的顺序运转。换句话说,本公开的多样实施例中说明的进程、方法及算法的步骤,无需按本公开中记述的顺序执行。另外,虽然说明的是一部分步骤按非同时方式执行的情形,但在其他实施例中,这种一部分步骤可以同时执行。另外,附图中描写的进程示例并不意味着举例的进程排除对其的不同变化及修订,并不意味着举例的进程或其步骤中任意某一者是本公开的多样实施例中一者以上所必需的,并不意味着举例的进程是优选的。
[0172]
所述对象物检查方法利用在xyz直角坐标上抓住对象物m并使之旋转的翻转装置10和检查对象物m的朝向+z轴方向的对象面的摄像装置。
[0173]
所述检查方法在初期检查步骤s20前,包括翻转装置10的移送单元200使对象物m沿x轴方向移送的初期移送步骤s10(参考图7及图8)。在初期移送步骤s10中,使对象物m沿x轴方向移送,以便对象物m放置于正确位置。其中,所述正确位置可以是y轴支架130能够沿y轴方向抓住对象物m的位置。在初期移送步骤s10中,对象物m被移送限位部340卡住而配置于所述正确位置。在初期移送步骤s10中,对象物m可以向+x轴方向移送。
[0174]
所述检查方法在初期移送步骤s10后,包括y轴支架130沿y轴方向抓住对象物m,所述摄像装置检查对象物m的对象面a的初期检查步骤s20(参考图9及图10)。在初期检查步骤s20中,在辅助夹紧部137使对象面a解除卡住的状态下,y轴支架130抓住对象物m。其中,所谓解除卡住状态,是指辅助夹紧部137不覆盖对象面a的一部分的状态。由此,所述摄像装置可以无干涉地检查对象面a的全部面积。初期检查步骤s20可以称为第一检查步骤s20。
[0175]
在初期检查步骤s20中,移送单元200相对于y轴翻转单元100向-z轴方向移动。在初期检查步骤s20中,y轴支架130抓住对象物m后,移送单元200可以相对于y轴支架130向-z轴方向移动。移送单元200相对于y轴翻转单元100下降而不干涉对象物m的旋转动作。此时,在移送单元200下降中,所述摄像装置也可以检查对象面a。
[0176]
所述检查方法在初期检查步骤s20后,包括使对象物m旋转而检查垂直于对象面a的对象面的中期检查步骤s30。在中期检查步骤s30中,y轴支架130可以使对象物m以y轴为中心旋转,所述摄像装置可以检查垂直于对象面a的对象面b1及作为所述对象面b1的相反面的对象面b2。中期检查步骤s30可以称为第二检查步骤s30。
[0177]
在中期检查步骤s30中,在辅助夹紧部137卡住对象面a的状态下,y轴支架130抓住对象物。由此,对象物m可以被y轴支架130稳定地抓住。
[0178]
在具备y轴翻转单元100及x轴翻转单元300的本实施例中,中期检查步骤s30包括第一中期检查步骤s31及第二中期检查步骤s36。在不具备x轴翻转单元300而具备y轴翻转单元100的另一实施例中,中期检查步骤s30可以不包括第二中期检查步骤s36。
[0179]
在第一中期检查步骤s31中,y轴支架130使对象物m以y轴为中心旋转,所述摄像装置检查垂直于对象面a的对象面b1及作为对象面b1的相反面的对象面b2(参考图11及图16至图18)。在第一中期检查步骤s31中,辅助夹紧部137可以相对于支撑夹紧部133向第一方向y1移动而成为卡住状态。
[0180]
在第一中期检查步骤s31中,y轴支架130使对象物m以y轴为中心旋转,所述摄像装置可以检查相对于对象面b1倾斜不足90度的对象面b1a、b1b及相对于对象面b2倾斜不足90度的对象面(图上未示出)中至少一者。在第一中期检查步骤s31中,y轴支架130可以沿z轴方向移动,以便对象面b1及对象面b2位于与对象面a相同的高度(参考图19a至图19c)。此时,y轴支架130借助于z轴升降单元500而沿z轴方向移动。
[0181]
第二中期检查步骤s36可以在第一中期检查步骤s31后进行。在第二中期检查步骤s36中,x轴支架330沿x轴方向抓住对象物m,使对象物m以x轴为中心旋转,从而所述摄像装置检查垂直于对象面a的对象面b3及作为对象面b3的相反面的对象面b4(参考图20至图24)。
[0182]
第二中期检查步骤s36包括x轴支架330抓住对象物m的步骤、y轴支架130放下对象物m的步骤、x轴支架330使对象物m旋转的步骤。在y轴支架130配置得使对象物m的对象面a朝向+z轴的状态下,进行一对侧框架320a、320b沿x轴方向彼此收窄而x轴支架330抓住对象
物m的步骤。在未图示的另一实施例中,在y轴支架130配置成使对象物m的对象面c朝向+z轴的状态下,也可以进行一对侧框架320a、320b沿x轴方向彼此收窄而x轴支架330抓住对象物m的步骤。在x轴支架330抓住对象物m的步骤之后,进行一对主体框架120a、120b沿y轴方向彼此张开,辅助夹紧部137相对于支撑夹紧部136向第二方向y2移动而y轴支架130放下对象物m的步骤。在y轴支架130放下对象物m的步骤后,进行x轴支架330使对象物m旋转的步骤。
[0183]
在第二中期检查步骤s36中,x轴支架330使对象物m以x轴为中心旋转,所述摄像装置检查相对于所述对象面b3倾斜不足90度的对象面b3a、b3b及相对于对象面b4倾斜不足90度的对象面(图上未示出)中至少一者。在第二中期检查步骤s36中,x轴支架330可以沿z轴方向移动,以便对象面b3及对象面b4位于与对象面a相同的高度(参考图25a及图25b)。此时,x轴支架330借助于z轴升降单元500而沿z轴方向移动。
[0184]
所述检查方法在中期检查步骤s30后,可以包括检查对象面c的后期检查步骤s40(参考图26至图28)。在后期检查步骤s40中,y轴支架130沿y轴方向抓住对象物m,所述摄像装置检查作为对象面a相反面的对象面c。后期检查步骤s40可以称为第三检查步骤s40。
[0185]
在后期检查步骤s40中,在辅助夹紧部137使对象面c解除卡住的状态下,y轴支架130抓住对象物m。此时,所谓解除卡住的状态,是指辅助夹紧部137不覆盖对象面c的一部分的状态。由此,所述摄像装置可以无干涉地检查对象面c的全部面积。
[0186]
后期检查步骤s40包括使对象物m旋转而配置成使对象面c朝向+z轴方向的步骤。在具备第二中期检查步骤s36的实施例中,后期检查步骤s40包括x轴支架330使对象物m旋转而配置成使对象面c朝向+z轴方向的步骤、y轴支架130抓住对象物m的步骤。
[0187]
在后期检查步骤s40中,移送单元200相对于y轴翻转单元100向+z轴方向移动。在后期检查步骤s40中,移送单元200相对于y轴支架130向+z轴方向上升,使得移送单元200支撑对象物m。此时,在移送单元200上升中,也可以检查对象面c。
[0188]
在后期检查步骤s40中,y轴支架130抓住对象物m后,x轴支架330可以相对于y轴支架130向-z轴方向移动。具体而言,y轴支架130抓住对象物m后,一对x轴支架330可以沿x轴方向彼此张开,相对于y轴支架130向-z轴方向移动。x轴支架330相对于y轴翻转单元100充分下降,从而在后期移送步骤s50中,当对象物m移送时,移送限位部340可以从对象物m向-z轴方向隔开。其中,在x轴支架330下降中,也可以检查对象面c。
[0189]
所述检查方法在后期检查步骤s40后,包括移送单元200使对象物m沿x轴方向移送的后期移送步骤s50(参考图29)。在后期移送步骤s50中,对象物m可以向+x轴方向移送。
[0190]
所述检查方法通过特定实施例进行了说明,但所述方法也可以在计算机可读记录介质中,以计算机可读代码体现。计算机可读记录介质包括存储有可借助于计算机系统而读取的数据的所有种类的记录装置。作为计算机可读记录介质的示例,可以包括rom(只读存储器)、ram(随机存取存储器)、cd-rom(只读光盘驱动器)、磁带、软盘、光数据存储装置等。另外,计算机可读记录介质可以分散于以网络连接的计算机系统,以分散方式存储计算机可读代码并运行。而且,体现所述实施例所需的功能性(functional)程序、代码及代码片段,可以由本公开所属技术领域的程序员容易地推导。
[0191]
以上根据一部分实施例和附图图示的示例,说明了本公开的技术思想,但本公开所属技术领域的技术人员可以理解,在不超出本公开的技术思想及范围的范围内,可以实现多样的置换、变形及变更。另外,这种置换、变形及变更应视为属于附带的权利要求书。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1