光学检测方法与流程
1.本发明涉及一种检测方法,特别是指一种避免误判表面上粒子的光学检测方法。
背景技术:
2.现有的一种自动光学检测(automated optical inspection,aoi)方法应用在一待测物的生产制造过程中,以检测该待测物内是否具有瑕疵,该待测物例如是智慧型手机的保护玻璃。该自动光学检测方法通过一处理单元、一影像撷取单元、及一光源来实施。该处理单元控制该光源投射灯光至该待测物,并控制该影像撷取单元撷取包含该待测物的一影像,进而对该影像作影像辨识,以在判断该待测物内具有瑕疵时,将该待测物判定为不良品。然而,现有的自动光学检测方法对于在该待测物的表面上的粒子,如灰尘,往往会判断为该待测物内的瑕疵,而导致误判的情形发生。也就是说,该待测物的表面上的粒子可以通过后续的清洁步骤而去除,不应该被判定为该待测物内的瑕疵,因此而成为一个待解决的问题。
技术实现要素:
3.本发明的目的在于提供一种避免误判表面上粒子的光学检测方法。
4.于是,本发明提供一种光学检测方法,适用于待测物、影像撷取单元、两个光源、及处理单元,所述待测物包含呈平面状的表面,其特征在于:所述光学检测方法包含步骤(a)~(d)。
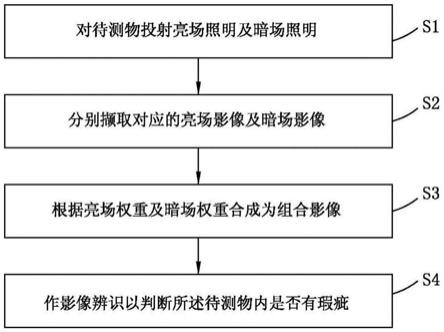
5.于步骤(a),通过所述光源在不同时间点,分别对所述待测物的所述表面投射两种光场照明,所述光场照明分别是亮场照明及暗场照明。
6.于步骤(b),通过所述影像撷取单元分别在所述亮场照明及所述暗场照明的情况下,对所述待测物的所述表面撷取影像,以分别获得亮场影像及暗场影像。
7.于步骤(c),通过所述处理单元根据公式w1*p1+w2*p2=p3,将所述亮场影像及所述暗场影像合成为组合影像,w1及w2分别是亮场权重及暗场权重,所述亮场权重及所述暗场权重都大于0且小于1,p1、p2、及p3分别是所述亮场影像、所述暗场影像、及所述组合影像在相同位置的画素值。
8.于步骤(d),通过所述处理单元对所述组合影像作影像辨识,以判断所述待测物内是否有瑕疵。
9.在一些实施态样中,所述两个光源分别是对应所述亮场照明的亮场光源,及对应所述暗场照明的暗场光源,其中,在步骤(a)中,所述影像撷取单元的拍摄方向与所述待测物的所述表面的法向量间的夹角为拍摄夹角,所述亮场光源的照射方向与所述待测物的所述表面的所述法向量间的夹角为亮场夹角,所述暗场光源的照射方向与所述待测物的所述表面的所述法向量间的夹角为暗场夹角,所述拍摄夹角大于零,所述暗场夹角大于所述亮场夹角。
10.在一些实施态样中,其中,所述拍摄夹角等于10度,所述亮场夹角等于10度,所述
暗场夹角等于45度,且所述影像撷取单元的所述拍摄方向与所述亮场光源的所述照射方向间的夹角等于20度,所述影像撷取单元的所述拍摄方向与所述暗场光源的所述照射方向间的夹角等于55度。
11.在另一些实施态样中,其中,在步骤(c)中,所述暗场权重小于所述亮场权重。
12.在一些实施态样中,其中,在步骤(c)中,所述暗场权重等于0.2,所述亮场权重等于0.8。
13.在另一些实施态样中,其中,在步骤(c)中,所述画素值是画素的灰阶亮度值。
14.在另一些实施态样中,其中,所述待测物的所述表面能够反射光线,所述待测物的材质为玻璃、金属、或陶瓷。
15.于是,本发明提供另一种光学检测方法,适用于检测待测物是否有瑕疵,其特征在于:所述光学检测方法包含包含步骤(a)~(d)。
16.于步骤(a),通过不同光源分别对所述待测物的表面投射两种光场照明,所述光场照明分别是亮场照明及暗场照明。
17.于步骤(b),通过相机分别在所述亮场照明及所述暗场照明的情况下,对所述待测物的所述表面撷取影像,以分别获得亮场影像及暗场影像。
18.于步骤(c),将所述亮场影像及所述暗场影像分别取不同权重而合成为组合影像。
19.于步骤(d),对所述组合影像作影像辨识,以判断所述待测物内是否有瑕疵。
20.于是,本发明提供另一种光学检测方法,适用于检测待测物是否有瑕疵,其特征在于:所述光学检测方法包含包含步骤(a)~(d)。
21.于步骤(a),通过光源分别对所述待测物的表面以不同的拍摄夹角投射两种光场照明,所述光场照明分别是亮场照明及暗场照明。
22.于步骤(b),通过相机分别在所述亮场照明及所述暗场照明的情况下,对所述待测物的所述表面撷取影像,以分别获得亮场影像及暗场影像。
23.于步骤(c),将所述亮场影像及所述暗场影像分别取不同权重而合成为组合影像。
24.于步骤(d),对所述组合影像作影像辨识,以判断所述待测物内是否有瑕疵。
25.于是,本发明提供另一种光学检测方法,适用于检测待测物是否有瑕疵,其特征在于:所述光学检测方法包含包含步骤(a)~(d)。
26.于步骤(a),通过光源分别对所述待测物的表面投射两种光场照明,所述光场照明分别是亮场照明及暗场照明。
27.于步骤(b),通过相机分别在所述亮场照明及所述暗场照明的情况下,对所述待测物的所述表面撷取影像,以分别获得亮场影像及暗场影像。
28.于步骤(c),将所述亮场影像及所述暗场影像分别取不同权重而合成为组合影像,且所述暗场影像取的权重小于所述亮场影像取的权重。
29.于步骤(d),对所述组合影像作影像辨识,以判断所述待测物内是否有瑕疵。
30.本发明的有益的效果在于:通过所述两个光源的亮场照明及暗场照明,以获得对应的所述亮场影像及所述暗场影像,再通过所述处理单元根据所述公式w1*p1+w2*p2=p3合成所述组合影像,使得所述处理单元对所述组合影像作影像辨识时,不会对所述待测物的所述表面上粒子产生误判,进而解决现有技术的问题。
附图说明
31.图1是一个示意图,说明本发明光学检测方法所适用的一个检测系统及一个待测物;
32.图2是一个流程图,说明本发明光学检测方法的一个实施例;
33.图3是一个示意图,辅助图1说明该实施例的一个暗场光源的态样;及
34.图4是一个示意图,辅助图1说明该实施例的一个亮场光源的态样。
具体实施方式
35.下面结合附图及实施例对本发明进行详细说明。
36.在本发明被详细描述的前,应当注意在以下的说明内容中,类似的元件是以相同的编号来表示。
37.参阅图1与图2,本发明光学检测方法的一个实施例,适用于一个检测系统及一个待测物9。检测系统包含一个影像撷取单元2、一个亮场光源31、一个暗场光源32、一个处理单元1、一个承载平台81、及一个轨道82。待测物9包括呈平面状的一个表面91,表面91能够反射光线,在本实施例中,待测物9例如是智慧型手机的保护玻璃,即待测物9的材质为玻璃,而在其他的实施例中,待测物9的材质也可以是金属或陶瓷。
38.检测系统用于检测生产制造过程中每一待测物9内是否具有瑕疵。处理单元1例如是一个电脑主机或一个运算装置(如处理器或微控制器),且电连接两个光源以控制两个光源是否投射出光线,并还电连接影像撷取单元2以控制是否撷取影像。承载平台81用于放置待测物9,并在轨道82上例如是由左至右移动。在本实施例中,影像撷取单元2是一种线扫描相机(multi-line camera),当承载平台81载着待测物9由左至右移动时,逐次撷取待测物9的表面91的单行影像,进而组合而成为待测物9的表面91的一个完整影像。而在其他实施例中,影像撷取单元2也可以是一种面扫描相机,如一般的照相机。
39.光学检测方法包含步骤s1~s4。
40.于步骤s1,处理单元1控制分别控制亮场光源31及暗场光源32在不同时间点,对待测物9的表面91投射一个亮场照明及一个暗场照明。更详细地说,影像撷取单元2的一个拍摄方向与待测物9的表面91的一个法向量间的夹角为一个拍摄夹角a1。亮场光源31的一个照射方向与待测物9的表面91的法向量间的夹角为一个亮场夹角b1。暗场光源32的一个照射方向与待测物9的表面91的法向量间的夹角为一个暗场夹角b2。拍摄夹角a1大于零,暗场夹角b2大于亮场夹角b1,且影像撷取单元2的拍摄方向与亮场光源31的照射方向间的夹角等于拍摄夹角a1加上亮场夹角b1。
41.在本实施例中,拍摄夹角a1等于10度,亮场夹角b1等于10度,暗场夹角b2等于45度,且影像撷取单元2的拍摄方向与亮场光源31的照射方向间的夹角等于20度,影像撷取单元2的拍摄方向与暗场光源32的照射方向间的夹角等于55度。此外,在本实施例中,检测系统包含两个光源,即亮场光源31及暗场光源32,而在其他实施例中,检测系统也可以只包含一个光源,并藉由移动单一个光源的位置,以产生亮场照明及暗场照明。
42.亮场照明是指一种部份亮场照明(partial bright field lighting),或称为定向照明(directional lighting),且是一种最常用的视觉照明技术,并且是每天使用且最熟悉的照明,包括日光。这种类型的照明与全亮场照明(full bright field lighting)的
区别在于它是定向的,通常是从点光源发出的,并且由于其定向性质,是一种生成对比度和增强地形细节的理想选择。暗场照明(dark field lighting)是一种以小角度入射在物体表面的光线作照明,这些光线从物体表面的缺陷及附近的物体反射回来,例如汽车前灯的照明方式。
43.再参阅图3与图4,图3与图4分别举例说明暗场光源32及亮场光源31照射待测物9的两种态样,其中,待测物9内包括一个瑕疵92,如裂痕,且待测物9的表面91上也有一个粒子93,如灰尘。当暗场光源32及亮场光源31分别照射粒子93及瑕疵92时,使得粒子93的部分区域95在表面91形成阴影96,且瑕疵92也在表面91形成阴影94。
44.于步骤s2,处理单元1控制影像撷取单元2分别在亮场照明及暗场照明的情况下,对待测物9的表面91撷取影像,以分别获得一个亮场影像及一个暗场影像。要特别补充说明的是:在本实施例中,因为影像撷取单元2是一种线扫描相机,因此,处理单元1是控制暗场光源32发光且控制亮场光源31不发光,并同时控制影像撷取单元2撷取一个单数行影像,接着,控制亮场光源31发光且控制暗场光源32不发光,并同时控制影像撷取单元2撷取一个偶数行影像,如此轮流交替地控制,以获取一张包含多个单数行影像及多个偶数行影像交替呈现的撷取影像。处理单元1再对撷取影像的所有单数行影像抽出并合并为暗场影像,且对撷取影像的所有偶数行影像抽出并合并为亮场影像。
45.于步骤s3,处理单元1根据公式w1*p1+w2*p2=p3,将亮场影像及暗场影像合成为一个组合影像,其中,w1及w2分别是一个亮场权重及一个暗场权重。亮场权重及暗场权重都大于0且小于1,且暗场权重小于亮场权重。p1、p2、及p3分别是亮场影像、暗场影像、及组合影像在相同位置的一个画素值,也就是同一个位置的画素的灰阶亮度值。在本实施例中,暗场权重等于0.2,亮场权重等于0.8,而在其他的实施例中,并不以此为限。
46.于步骤s4,处理单元1对组合影像作影像辨识,以判断待测物9内是否有瑕疵。举例来说,处理单元1对组合影像所采用的影像辨识技术与现有技术相同,但是因为组合影像是通过亮场影像及暗场影像经由亮场权重及暗场权重所合成,因此,同样的影像辨识技术却能够获得正确的判断结果,也就是正确判断待测物9内有无瑕疵且忽略待测物9的表面91上粒子的存在与否。另外,要特别补充说明的是:待测物9的表面91上可以形成有孔洞,例如对应智慧型手机的听筒位置的穿孔,穿孔在组合影像中仍然可以被处理单元1作正确地影像辨识。
47.综上所述,通过亮场光源31及暗场光源32在不同的时间点照射,使得影像撷取单元2获得对应的亮场影像及暗场影像,再通过处理单元1根据公式w1*p1+w2*p2=p3合成组合影像,进而能够在对组合影像作影像辨识时,不会对待测物9的表面91上粒子产生认定为待测物9内的瑕疵的误判,所以确实能达成本发明的目的。
48.惟以上所述者,仅为本发明的实施例而已,当不能以此限定本发明实施的范围,即大凡依本发明权利要求书及专利说明书内容所作的简单的等效变化与修饰,皆仍属本发明专利涵盖的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1