动物检体拾取装置及其系统
1.本发明是有关于一种拾取装置,尤其是有关于一种动物检体拾取装置及其系统。
背景技术:
2.现今有许多养殖场,并且养殖场提供给人们生活所需的食物来源。以蛋鸡场为例,传统的蛋鸡场饲养方式多为一层楼的开放式建筑,鸡舍内部为三层式的鸡笼,并且机械化程度普遍偏低,除半自动饲料输送外,捡蛋与鸡粪多由人工处理,并且鸡笼与隔板或地面之间的高度通常为狭小的,造成鸡蛋与鸡粪都较难收集。除此之外,具有机械化的回收鸡舍粪便的装置通常为统一回收,并无法区分粪便为从哪一个鸡笼所回收。
技术实现要素:
3.鉴于上述,本发明提供一种动物检体拾取装置及其系统,以提供方便及快速的收集动物检体以及依据所述动物检体所对应的回收的区域,分类管理该动物检体,以当动物检体检验的结果为异常时,能立即得知养殖场的哪一个区域的动物呈现异常状态,并即时做相应的处理。
4.依据一些实施例,动物检体拾取装置包含采集装置以及驱动装置。采集装置包含至少一个开口,以经由至少一个开口收集动物检体。驱动装置带动采集装置在采集面上移动。采集面上具有该动物检体。驱动装置包含球壳、控制器以及驱动模组。控制器位于球壳内,产生控制讯号。驱动模组位于球壳内,依据控制讯号带动球壳滚动。
5.依据一些实施例,采集装置包含采集箱以及牵引部。采集箱具有用于收容动物检体的容室。采集箱的侧面的下端设置有至少一个开口,以连通容室。牵引部连接于采集箱,并具有半球形槽,以扣盖于球壳上,使得驱动装置移动时牵动采集箱。
6.依据一些实施例,采集装置包含外球壳以及至少一个定位部。外球壳包覆驱动装置的球壳外。外球壳分散地设置有多个开口。定位部连接于球壳与外球壳之间,使得驱动装置的球壳滚动时连动外球壳滚动。
7.依据一些实施例,开口的孔隙大小能供动物检体填塞于其上。
8.依据一些实施例,外球壳包含多个子壳体。子壳体可拆卸的组合在一起。
9.依据一些实施例,采集装置的外球壳的外表面具有至少一个凸出部。
10.依据一些实施例,驱动装置还包含无线通讯界面。无线通讯界面耦接控制器,控制器响应经由无线通讯界面接收的控制指令而产生控制讯号,以控制驱动装置移动。
11.依据一些实施例,动物检体拾取系统包含动物检体拾取装置以及控制主机。动物检体拾取装置投放于养殖端的区域。动物检体拾取装置还包含受控端通讯界面。受控端通讯界面耦接控制器。受控端通讯界面用以接收或发送定位讯号。控制主机设置于养殖端。控制主机与动物检体拾取装置中的一个对另一个通过定位讯号执行室内定位以取得定位资讯。控制主机根据定位资讯记录动物检体拾取装置位于养殖端的区域。
12.依据一些实施例,动物检体拾取系统还包含环境侦测模组。环境侦测模组侦测养
殖端的区域的环境状态,在侦测到区域的环境状态符合触发条件时,控制主机发出投放控制讯号。动物检体拾取装置的控制器响应经由受控端通讯界面接收的投放控制讯号而产生控制讯号,以控制动物检体拾取装置移动至区域,其中环境侦测模组经由人机界面显示养殖端的区域的环境状态。
13.依据一些实施例,动物检体拾取装置还包含环境侦测器。环境侦测器侦测对应投放的区域的环境状态,其中动物检体拾取装置的控制器经由人机界面显示对应投放的区域的环境状态。
14.因此,依据一些实施例,藉由动物检体拾取装置的驱动装置在滚动时,带动设有开口的采集装置在采集面上收集动物检体,使位于狭小空间的动物检体也能轻易收集,并可减少人力的资源成本。通过动物检体拾取系统的定位机制,可轻易区分收集的动物检体是分别从哪一个养殖端的区域获得,致使当动物检体经过检测后发现异常时,能对异常的该动物检体所对应的养殖端的区域做后续处理,例如防疫处理(扑杀感染病菌的动物)、隔离措施等。
附图说明
15.图1为本发明一实施例的动物检体拾取装置的立体图。
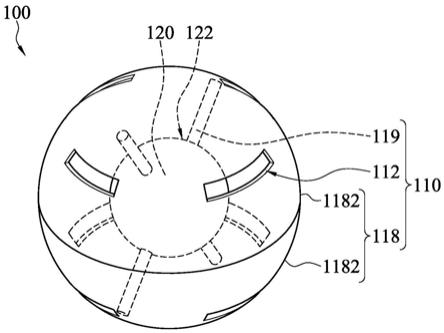
16.图2为本发明另一实施例的动物检体拾取装置的立体图。
17.图3为本发明又一实施例的动物检体拾取装置的立体图。
18.图4为本发明一实施例的动物检体拾取系统的电路方块示意图。
19.图5为本发明一实施例的动物检体拾取系统的架构示意图。
20.【摘要附图标记】
21.100:动物检体拾取装置
22.110:采集装置
23.112:开口
24.118:外球壳
25.1182:子壳体
26.119:定位部
27.120:驱动装置
28.122:球壳
具体实施方式
29.参照图1,系为本发明一实施例的动物检体拾取装置100的立体图。动物检体拾取装置100包含采集装置110以及驱动装置120。采集装置110 包含开口112,以经由开口112收集动物检体130。驱动装置120连接采集装置110,并带动采集装置110在采集面140上移动。采集面140系指具有动物检体130的表面,例如地面、鸡笼底面等,视养殖环境其可能为光滑平面也可能为凹凸不平的表面。驱动装置120包含球壳122、控制器124 以及驱动模组126。控制器124及驱动模组126位于球壳122内,控制器 124耦接驱动模组126,并产生控制讯号给驱动模组126,以致动驱动模组 126,从而控制驱动装置120的移动方向。
30.当驱动装置120滚动而位移时,例如驱动模组126致动后使球壳122 在采集面140
上滚动而使驱动装置120位移时,能带动采集装置110随之移动,进而使得开口112接触于采集面140上,因此可经由开口112收集动物检体130。如此,即便动物检体130位于例如是鸡舍中鸡笼与鸡笼之间的通道、鸡笼与鸡笼底部隔板的通道或鸡笼与地面之间的通道等狭小空间,也能轻易收集到动物检体130。除此之外,也可减少人力的资源成本。
31.采集装置110还可以包含采集箱114以及牵引部116。采集箱114具有用于收容动物检体130的容室1142。采集箱114的侧面的下端设置有开口112,以连通容室1142。牵引部116包含半球形槽1162及连接件1164。半球形槽1162扣盖于球壳122上,并经由连接件1164连接采集箱114,使得驱动装置120移动时牵动采集箱114,进而牵动采集装置110移动及在采集面140上经由开口112收集动物检体130并收容于容室1142中。在此,连接件1164系为两连杆,各连杆两端分别连接采集箱114的一侧与半球形槽1162的一侧。但本发明非限于此,连接件1164也可以是例如链条、齿轮等。当驱动装置120移动并牵动采集箱114时,采集装置110经由连接于开口112下端的底部与采集面140接触,通过铲收的方式收集动物检体130,使得动物检体130通过开口112进入容室1142中。
32.在一些实施例中,采集箱114可设置有多个开口112。此些开口112 可连通至同一容室1142,或者可连通至多个不连通的容室1142。
33.在一些实施例中,半球形槽1162可扣盖于球壳122三分之一的外表面,但并不以此为限,例如四分之一的外表面、二分之一的外表面等,只要能达成扣盖于球壳122的外表面的方式即可。在一些实施例中,半球形槽1162 的外表面或内表面不限制必然为圆滑曲面,亦可具有棱角。
34.在一些实施例中,牵引部116与采集箱114之间具有至少一个固定机构,提供可移除的固定方式将牵引部116相对于半球形槽1162的一端固定于采集箱114。所述可移除的固定方式可例如为胶合、磁吸、锁固、螺固等。例如,固定机构为相配合的螺杆与螺帽,螺杆穿设于采集箱114,连接件1164的一端具有穿孔以套设于螺杆上,并经由螺帽螺锁固定半球形槽 1162及采集箱114。
35.在一些实施例中,当收集完动物检体130时可通过拆卸固定机构而将牵引部116与采集箱114分离,以利于取出采集箱114中的动物检体130,供后续检测之用。取出采集箱114中的动物检体130之后,可将另一采集箱114与牵引部116连接,或者将使用过的采集箱114清理之后再与牵引部116连接。如此,可达到快速回收动物检体130、重复利用及减少资源与材料浪费的功效。
36.在一些实施例中,采集装置110的本体可为由塑胶材料、金属材料、弹性材料等所制作而成的装置。其中,弹性材料可为橡胶、弹性合金、热塑性弹性体等。在一些实施例中,开口112的形状可为矩形、三角形、圆形、不规则形态等等。在一些实施例中,动物检体130可为动物的粪便、动物的体液、动物的尿液、动物的血液等,但不限于此。动物检体130可为固态、液态、或膏糊状等。
37.在一些实施例中,驱动装置120可为球型机器人。球壳122的材料可为由塑胶、金属、弹性材料等。其中,弹性材料可为橡胶、弹性合金、热塑性弹性体等。球壳122可为球体或趋近于球体形状的多边体的壳体。控制器124例如但不限于中央处理器(cpu,central processing unit)、微处理器(microprocessor)、特定应用积体电路(asic,application-specificintegrated circuit)、系统单晶片(soc,system on a chip)等。
38.驱动模组126可由马达1262及滚轮1264来实现,以带动球壳122滚动。具体来说,滚轮1264抵靠球壳122,马达1262经由输出轴1266连接滚轮1264,并依据控制讯号致动后,经由输出轴1266使滚轮1264滚动,进而带动球壳122滚动,以使驱动装置120位移。其中,马达1262可为步进马达、直流马达、交流马达、脉冲马达、同步马达等,但并不以此为限。在一些实施例中,驱动模组126依据控制讯号来带动球壳122的滚动方向,例如依据控制讯号使其中一个滚轮1264的转动速率比另一滚轮1264 快,从而让球壳122朝转动速率较快的滚轮1264所带动的方向滚动。在一些实施例中,驱动模组126还可包含弹性元件,以辅助滚轮1264抵靠球壳122。弹性元件可为由弹性材料所做成的元件,弹性材料例如但不限于橡胶材料、聚异戊二烯类、合成聚异戊二烯橡胶、丁基橡胶等。
39.参照图2,系为本发明另一实施例的动物检体拾取装置100的立体图。采集装置110包含外球壳118以及至少一个定位部119。外球壳118包覆驱动装置120的球壳122之外。外球壳118分散地设置有多个开口112。定位部119连接于球壳122与外球壳118之间,使得驱动装置120的球壳 122滚动时连动外球壳118滚动。在此,定位部119呈柱状,但本发明非限于此。
40.在一些实施例中,球壳122的外表面与外球壳118的内表面分别设置有对应定位部119的凹槽,以供定位部119插设于凹槽中。在一些实施例中,外球壳118的外表面或内表面不限制必然为圆滑曲面,亦可具有棱角。在一些实施例中,外球壳118的形状是与球壳122的形状相同,然而在一些实施例中,外球壳118的形状是与球壳122的形状不同。例如,球壳122 为趋近于球体的多边体,外球壳118为浑圆的球体。
41.在一些实施例中,外球壳118的开口112的孔隙大小能供动物检体130 填塞于其上。由于动物检体130可为膏状物,例如鸡粪,当驱动装置120 的球壳122连动外球壳118滚动时,通过在采集面140上滚动,使动物检体130挤压填塞于开口112。
42.在一些实施例中,外球壳118包含多个子壳体1182,所述多个子壳体 1182可拆卸的组合在一起。例如子壳体1182为两个半球形壳体,并且分别具有对应的旋转螺纹,因此可通过将两个半球形壳体经由相互对应的螺纹而旋转组合成外球壳118。在一些实施例中,外球壳118还包含至少一个组合元件,所述多个子壳体1182经由组合元件组合成外球壳118。组合元件可为以胶合、磁吸、锁固、螺固、卡固等方式实现的组件。举例来说,以两个子壳体1182来说明,例如组合元件可为卡勾及对应该卡勾的卡槽,一个子壳体1182具有该卡勾,另一子壳体1182具有该卡槽,通过将卡勾卡接于卡槽,而将所述多个子壳体1182组合成外球壳118。藉由拆卸及组合子壳体1182,可更方便的更换驱动装置120及回收动物检体130,例如仅需更换新的外球壳118,或将回收并清理完动物检体130的外球壳118 后重新经由定位部119连接球壳122,即可再次在采集面140上收集动物检体130。
43.在一些实施例中,采集装置110可以不包含定位部119,即外球壳118 直接套设并包覆球壳122,致使当驱动装置120的球壳122滚动时,外球壳118也会随之滚动。在此,外球壳118系可为软性材质,例如矽胶,而有利于和球壳122紧密贴合。而外球壳118也可选用摩擦系数大的材质,有利于增加摩擦力以帮助滚动。由于外球壳118可为软性材质并且包覆于球壳122,因此外球壳118可以随着驱动装置120的球壳122所呈现的形态而做形态上的改变。
44.参照图3,系为本发明又一实施例的动物检体拾取装置100的立体图。采集装置110的外球壳118的外表面具有至少一个凸出部1184,以增加在采集面140上移动时的摩擦力。
该凸出部1184可为任何形状的凸出部,例如圆形、三角形等,但并不以此为限。凸出部1184可例如为金属、塑胶等材质。
45.在一些实施例中,驱动装置120还包含无线通讯界面。无线通讯界面耦接控制器124,控制器124响应经由无线通讯界面接收的控制指令而产生控制讯号,以控制驱动装置120移动。例如无线通讯界面从使用者装置接收控制指令,控制器124响应控制指令,并产生控制讯号以控制驱动装置120的移动方向。无线通讯界面可以提供短距通讯功能,例如但不限于是无线传输的通讯界面,如蓝牙、无线热点、行动通讯、近距离无线通讯 (nfc,near-field communication),或提供网路通讯服务,通过网路来通讯。使用者装置例如但不限于手机、个人数位助理(pda,personal digitalassistant)、笔记型电脑、桌上型电脑等。
46.在一些实施例中,动物检体拾取装置100还包含一个或多个环境侦测器,用以侦测外部环境的状态,例如侦测鸡舍或养殖场的环境状态。举例来说,环境侦测器可为温度感测器,用以侦测鸡舍或养殖场的温度;环境侦测器可为湿度感测器,用以侦测鸡舍或养殖场的湿度;环境侦测器可为风向感测器,用以侦测鸡舍或养殖场的风向;环境侦测器可为风速感测器,用以侦测鸡舍或养殖场的风速;环境侦测器可为光感测器,用以侦测鸡舍或养殖场的光照强度;或是环境侦测器可为氨气感测器,用以侦测鸡舍或养殖场的氨气浓度等,但并不以此为限。
47.在一些实施例中,驱动装置120还包含角度量测模组。角度量测模组耦接控制器124。角度量测模组测量驱动装置120滚动时的旋转角度,控制器124依据该旋转角度调整驱动装置120滚动时的角度以平衡驱动模组 126,使驱动装置120可以平衡的滚动。角度量测模组例如但不限于机械式陀螺仪、光纤陀螺仪、雷射谐振陀螺仪、集成式的振动陀螺仪、微机电陀螺仪、角速度感测器等。在一些实施例中,驱动装置120还包含摄像装置,用以撷取驱动装置120外部的影像。在一些实施例中,驱动装置120 还包含电路板,可供控制器124、驱动模组126、无线通讯界面、环境侦测器、角度量测模组及摄像装置等连接。
48.为了方便说明动物检体拾取系统,于后将动物检体拾取装置100的无线通讯界面称为受控端通讯界面128。
49.参照图1至图5。图4系为本发明一实施例的动物检体拾取系统200 的电路方块示意图。图5系为本发明一实施例的动物检体拾取系统200的架构示意图。动物检体拾取系统200包含动物检体拾取装置100以及控制主机220。动物检体拾取装置100投放于养殖端210的区域212。养殖端 210可为养殖场。养殖端210可具有一个或多个区域212。控制主机220 设置于养殖端210。控制主机220包含主机端通讯界面222以及处理器224。处理器224耦接主机端通讯界面222。
50.动物检体拾取系统200的动物检体拾取装置100的室内定位可藉由动物检体取样装置100来计算实现或是由控制主机220来计算实现。在此以藉由动物检体取样装置100计算实施室内定位来说明。动物检体拾取装置 100的受控端通讯界面128接收定位讯号。在一些实施例中,定位讯号可为无线广播讯号,例如为wifi广播讯号、蓝牙广播讯号(beacon)等。受控端通讯界面128在接收定位讯号后,由控制器124执行室内定位,例如进行出发角(angle of departure,aod)定位,做相位(in-phase)及正交相位(quadrature-phase)的取样,即iq(in-phase quadrature-phase)值的取样,并依据该iq值计算动物检体拾取装置100于养殖端210所在位置,而产生定位资讯,并将该定位资讯经由受控端通讯界面128传送
至控制主机220。在此,定位讯号可由控制主机220、使用者装置或一个或多个信标装置发出,所述装置具备支持角度检测的天线组,以使动物检体拾取装置100可进行出发角(angle of departure,aod)定位。在一些实施例中,动物检体拾取装置100的控制器124及受控端通讯界面128可以符合蓝牙5.1或蓝牙5.1以下版本的准则的室内定位技术来计算动物检体拾取装置100所在位置。
51.在一些实施例中,定位资讯可以包含动物检体拾取装置100于养殖端 210所处的相对座标、动物检体拾取装置100的绝对座标(如经纬度座标)、定位讯号的到达角或出发角的相位或正交相位等。该相对座标可为动物检体拾取装置100相对于控制主机220、使用者装置、信标装置的座标。因此,根据定位资讯能得知动物检体拾取装置100位于养殖端210的哪一区域212。
52.在一些实施例中,控制器124依据定位讯号,进行三角定位而产生定位资讯。例如,控制器124依据定位讯号的接收讯号强度指示(receivedsignal strength indication,rssi)的衰减程度计算动物检体拾取装置100 与信标装置之间的距离,并利用三角定位获得动物检体拾取装置100的座标而产生定位资讯。
53.在此以藉由控制主机220计算实现室内定位来说明。动物检体拾取装置100的受控端通讯界面128发出定位讯号,控制主机220的主机端通讯界面222接收定位讯号,处理器224执行室内定位,例如进行到达角(angleof arrival,aoa)定位,做相位(in-phase)及正交相位(quadrature-phase) 的取样,即iq(in-phase quadrature-phase)值的取样,并依据该iq值计算动物检体拾取装置100于养殖端210所在位置,而产生定位资讯。例如,处理器224依据该iq值进行三角定位运算而获得动物检体拾取装置100 于养殖端210的相对座标或绝对座标。在此,主机端通讯界面222可为多天线的天线组。
54.在一些实施例中,控制主机220的处理器224及主机端通讯界面222 可以符合蓝牙5.1或蓝牙5.1以下版本的准则的室内定位技术来计算动物检体拾取装置100所在位置。
55.在一些实施例中,可藉由多个信标装置来接收定位讯号,控制主机220 的处理器224经由信标装置进行到达角定位而产生到达角参数,处理器224 依据该到达角参数计算动物检体拾取装置100所在的位置而产生定位资讯。
56.处理器224依据定位资讯,将动物检体拾取装置100位于养殖端210 的区域212的资讯记录于记忆装置中。记忆装置用以储存资讯。记忆装置例如但不限于固态硬碟、随机存取记忆体(ram,random access memory) 等。举例来说,处理器224解析该定位资讯而获得动物检体拾取装置100 于养殖端210所处的位置,即获得动物检体拾取装置100位于养殖端210 的多个区域212中的哪一个区域212而产生定位结果,并将该定位结果储存于记忆装置中。因此,当动物检体拾取装置100收集完动物检体130时,养殖人员可藉由定位结果而得知动物检体拾取装置100所对应投放的区域 212,进而得知动物检体130为从养殖端210的哪一个区域212所收集,致使若动物检体130经过检测后发现异常时,能对异常的该动物检体130 所对应的养殖端210的区域212做后续处理,例如防疫处理(扑杀感染病菌的动物)、隔离措施等。
57.处理器224例如但不限于中央处理器(cpu,central processing unit)、微处理器(microprocessor)、特定应用积体电路(asic,application-specificintegrated circuit)、系统单晶片(soc,system on a chip)等。主机端通讯界面222可以提供短距通讯
功能,例如但不限于是无线传输的通讯界面,如蓝牙、无线热点、行动通讯、近距离无线通讯(nfc,near-fieldcommunication),或提供网路通讯服务,通过网路以与其他装置做通讯。
58.在一些实施例中,动物检体拾取系统200包含一个或多个动物检体拾取装置100以及一个或多个控制主机220。在一些实施例中,处理器224 所产生的定位结果可传送至云端伺服器或使用者装置。在一些实施例中,控制主机220还可包含有线通讯界面,提供网路通讯服务,例如但不限于以太网(ethernet)等。
59.在一些实施例中,动物检体拾取系统200还包含环境侦测模组。环境侦测模组侦测养殖端210的区域212的环境状态,在侦测到区域212的环境状态符合触发条件时,环境侦测模组发送环境讯号,控制主机220的处理器224响应该环境讯号,并经由主机端通讯界面222发出投放控制讯号。触发条件可为养殖端210的区域212的环境状态呈现异常状态,异常状态可为温度过高、湿度过高、氨气浓度过高等。动物检体拾取装置100的控制器124响应经由受控端通讯界面128接收的投放控制讯号而产生控制讯号,以控制动物检体拾取装置100移动至区域212,其中环境侦测模组经由人机界面显示养殖端210的区域的环境状态。因此,当区域212的环境状态出现异常时,可即时将动物检体拾取装置100投放至出现异常环境状态的区域212,以收集动物检体130,并在检测出动物检体130具有异常发生时,例如动物检体130内的氨含量过高,则立即采取后续的防疫及隔离措施。此外,养殖人员可通过人机界面实时监控养殖端210的环境状态。
60.环境侦测模组例如但不限于温度感测器、湿度感测器、风向感测器、风速感测器、光感测器、氨气感测器或是整合前述感测器的整合型感测器。前述感测器分别侦测养殖端210的区域212的温度、湿度、风向、风速、光照强度以及氨气浓度等。前述触发条件可包含养殖端210的区域212的温度超出预设阀值或是超出养殖端210内的动物适宜生长的温度;湿度超出预设阀值或是超出养殖端210内的动物适宜生长的湿度;风向偏离预设方向或是偏离养殖端210内的动物适宜生长的风向;风速超出预设阀值或是超出养殖端210内的动物适宜生长的风速;光照强度超出预设阀值或是超出养殖端210内的动物适宜生长的光照强度;以及氨气浓度超出预设阀值或是超出养殖端210内的动物适宜生长的氨气浓度等。在一些实施例中,符合触发条件的至少一项时,控制主机220的处理器224即经由主机端通讯界面222发出投放控制讯号。在一些实施例中,环境侦测模组可设置于控制主机220,并耦接处理器224。
61.在一些实施例中,人机界面可以是由液晶荧幕、触碰荧幕等所构成的显示界面。在一些实施例中,人机界面可设置于控制主机220、使用者装置或动物检体拾取装置100。在一些实施例中,可由使用者装置发送投放控制讯号、使用者装置经由控制主机220发送投放控制讯号或是使用者装置经由云端伺服器传送投放控制指令至控制主机220,控制主机220响应该投放控制指令并发送投放控制讯号。
62.在一些实施例中,动物检体拾取装置100的环境侦测器侦测对应投放的区域212的环境状态,其中动物检体拾取装置100的控制器124经由人机界面显示对应投放的区域212的环境状态。
63.在一些实施例中,动物检体拾取系统200还可包含行动质谱仪,设置于养殖端210,以使动物检体拾取装置100收集完的动物检体130可立即于养殖端210端做检测,并在检测结果为异常时,迅速采取防疫或隔离的措施,以将感染生病的动物与健康的动物分离,以免
造成养殖端210全面性的污染。
64.在一些实施例中,动物检体拾取系统200还可包含检测平台,以快速检验动物检体130。例如通过行动质谱仪检测动物检体130的结果为正常时,则经由检测平台检验动物检体130的色素、农药、塑化剂、抗生素、残留兽药等,并在结果为异常时,即迅速采取防疫或隔离的措施。
65.在一些实施例中,动物检体拾取系统200还可包含感染预测模组,用以预测及评估养殖端210内的动物的感染风险。例如藉由行动质谱仪及检测平台检验动物检体130而得的结果,并经由机器学习以判断动物感染疾病的机率。例如若检验动物检体130而得的结果中,氨含量接近动物体内正常含量的上限时,则动物感染疾病的机率即较高。
66.因此,依据一些实施例,藉由动物检体拾取装置的驱动装置在滚动时,带动设有开口的采集装置在采集面上收集动物检体,使位于狭小空间的动物检体也能轻易收集,并可减少人力的资源成本。通过动物检体拾取系统的定位机制,可轻易区分收集的动物检体是分别从哪一个养殖端的区域获得,致使当动物检体经过检测后发现异常时,能对异常的该动物检体所对应的养殖端的区域做后续处理,例如防疫处理(扑杀感染病菌的动物)、隔离措施等。
67.【附图标记】
68.100:动物检体拾取装置
69.110:采集装置
70.112:开口
71.114:采集箱
72.1142:容室
73.116:牵引部
74.1162:半球形槽
75.1164:连接件
76.118:外球壳
77.1182:子壳体
78.1184:凸出部
79.119:定位部
80.120:驱动装置
81.122:球壳
82.124:控制器
83.126:驱动模组
84.128:受控端通讯界面
85.1262:马达
86.1264:滚轮
87.1266:输出轴
88.130:动物检体
89.140:采集面
90.200:动物检体拾取系统
91.210:养殖端
92.212:区域
93.220:控制主机
94.222:主机端通讯界面
95.224:处理器。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1