基于直线轨道和转台的雷达目标模拟方法与设备与流程
1.本发明涉及基于直线轨道和转台的雷达目标模拟方法和设备,属于雷达测试领域。
背景技术:
2.随着汽车辅助驾驶、自动驾驶的迅速发展,车载毫米波雷达的需求与日俱增。雷达在研发和量产测试时需要用到目标模拟器,现有目标模拟器对角度的模拟一般采用圆弧轨道,即把模拟器的发射天线放到以雷达为圆心的圆弧轨道上运动,从而完成目标方位角度的模拟,距离的模拟依靠模拟器的延时功能来完成。由于大半径圆弧轨道加工困难、成本高,另外圆弧运动的角速度也比较低,难以模拟大速度的横向运动目标,圆弧半径越大,移动角速度越慢。现有技术只能实现小半径圆弧轨道,难以满足雷达远场测试条件的要求。
3.汽车雷达角度测试要求雷达与模拟器之间的距离需要满足远场条件,对于汽车雷达频段一般要达到4m以上,现有模拟器难以满足远场距离要求。
技术实现要素:
4.根据本发明,仍然利用机械滑轨技术来模拟方位角度,通过在直线轨道上设计转台,取代现有的圆弧轨道技术,使得模拟器和雷达之间的距离满足远场条件。
5.本发明提出了一种基于直线轨道和转台的雷达目标模拟方法,其中,所述方法包括:将模拟器的发射天线固定在方位可旋转的转台上,让转台做相对于雷达的横向直线运动实现目标方位角度的模拟,转台在直线运动的同时也做自身的旋转运动,实时确保模拟器发射天线的主瓣始终指向雷达的接收天线相位中心。
6.优选地,所述模拟器发射天线的相位中心固定在转台的轴心上。
7.优选地,所述的直线运动,其直线运动的位置坐标ra计算公式如下:
8.ra=r0tgθ
9.其中,ra为转台轴心距离雷达法线方向的最近距离,r0为雷达接收天线与模拟器发射天线的最近距离,θ为当前模拟目标的方位角度。
10.优选地,所述的转台自身的旋转运动,其方位角度控制量β等于当前模拟目标的方位角度θ。
11.优选地,所述的模拟器在模拟过程中需要实时补偿由直线运动引起的目标距离变化,距离补偿量δr计算公式如下:
[0012][0013]
其中,δr为距离补偿量,r0为雷达接收天线与模拟器发射天线的最近距离,θ为当前模拟目标的方位角度。
[0014]
优选地,所述的模拟器在模拟过程中需要实时补偿由雷达接收天线与模拟器发射天线之间物理距离变化引起的模拟目标rcs大小的变化,模拟器对发射信号的幅度补偿系
数αa计算公式如下:
[0015][0016]
其中,θ为当前模拟目标的方位角度。
[0017]
优选地,所述的模拟器在模拟过程中需要实时补偿由雷达接收天线与模拟器发射天线之间物理距离变化引起的模拟目标多普勒大小的变化,模拟器对模拟目标的多普勒进行补偿,补偿多普勒的大小δfd计算公式如下:
[0018][0019]
其中,v为模拟目标的速度大小,r0为雷达接收天线与模拟器发射天线的最近距离,r为模拟目标的距离值,θv为目标速度方向与雷达法线方向的夹角,θ为当前模拟目标的方位角度,λ为发射信号中心频率对应的波长。
[0020]
本发明还提出了一种基于直线轨道和转台的雷达目标模拟设备,其中,所述设备实现如上所述的雷达目标模拟设备。
[0021]
根据本发明,可以扩大模拟器发射天线和雷达之间的距离,满足雷达角度测试的远场条件,同时直线轨道易于加工,精度高,成本低。
附图说明
[0022]
图1:是现有技术的原理框图;
[0023]
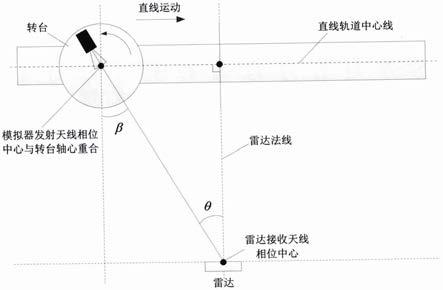
图2:是本发明方法的原理框图;
[0024]
图3:是本发明方法可行性分析原理框图;
[0025]
图4 :77ghz频段雷达目标模拟器系统组成框图。
具体实施方式
[0026]
下面结合附图与具体实施方式对本发明做进一步详细描述。
[0027]
本发明方法实施例如下:
[0028]
根据本发明,提出了一种基于直线轨道和转台的雷达目标模拟方法,完整保留了现有模拟器的所有硬件和软件框架,只是将圆弧轨道换成直线轨道和转台。图1所示为现有模拟技术的机械部分原理框图。现有技术将模拟器的发射天线固定在圆弧动子上,圆弧动子在以雷达为圆心的圆弧轨道上做运动,从而完成目标方位角度的模拟。图2为本发明方法的机械部分原理框图。根据图2,与现有技术特征的不同主要体现在采用直线轨道和转台,将模拟器的发射天线固定在方位可旋转的转台上,让转台做相对于雷达的横向直线运动实现目标方位角度的模拟,转台在直线运动的同时也做自身的旋转运动,实时确保模拟器发射天线的主瓣始终指向雷达的天线相位中心。
[0029]
现有技术的目标模拟流程如下:接收天线获取雷达发射信号,经过下变频模块得到中频信号,经过距离和速度的调制后,通过上变频模块,再由发射天线辐射给雷达,完成目标距离和速度的模拟。通过将发射天线放置在以雷达为圆心的圆弧轨道上,通过电机控制实现发射天线的圆弧运动,从而完成目标的方位角度模拟功能。
[0030]
根据本发明,接收天线获取雷达发射信号,经过下变频模块得到中频信号,经过距
离和速度的调制后,通过上变频模块,再由发射天线辐射给雷达,完成目标距离和速度的模拟。将模拟器的发射天线固定在方位可旋转的转台上,让转台做相对于雷达的横向直线运动实现目标方位角度的模拟,其直线运动的位置坐标ra计算公式为ra=r0tgθ。为了达到这一目的,在固定发射机天线时,保证模拟器发射天线的相位中心固定在转台的轴心上,确保转台在转动的过程中,天线的相位中心始终做精确的直线运动。
[0031]
转台在直线运动的同时也做自身的旋转运动,实时确保模拟器发射天线的主瓣始终指向雷达的天线相位中心。为了达到这一目的,转台方位角度控制量β等于当前模拟目标的方位角度θ。
[0032]
在模拟目标控制量为方位角度θ和距离r时,在上述的机械运动控制下,已经精确的完成了方位角度的模拟,但是由于直线滑轨的原因,模拟器发射天线相位中心的运动为相对于雷达的横向直线运动,因此模拟目标的距离发生了变化,这是直线轨道的特有问题。为了保证模拟目标距离的正确性,需要实时补偿由直线运动引起的目标距离变化,距离补偿量δr计算公式如下:
[0033][0034]
其中,δr为距离补偿量,r0为雷达接收天线与模拟器发射天线的最近距离,θ为当前模拟目标的方位角度,经过补偿可实现目标距离的精确模拟。
[0035]
在模拟目标控制量为方位角度θ和距离r时,在上述的机械运动控制下,模拟器发射天线的相位中心相对于雷达的实际物理距离发生了变化,这会引起模拟目标rcs大小发生变化,以最近距离为参考下,所有的位置都会引起rcs的衰减。因此,为了精确模拟目标rcs,需要模拟器对发射信号的幅度进行补偿,直接乘以补偿系数αa=1/cos2θ,经过补偿可实现目标rcs的精确模拟。
[0036]
在模拟目标控制量为方位角度θ和距离r时,在上述的机械运动控制下,模拟器发射天线的相位中心相对于雷达的实际物理距离发生了变化,这会引起模拟目标径向速度大小发生变化。因此,为了精确模拟目标径向速度大小,需要模拟器对模拟目标的多普勒进行补偿,补偿多普勒的大小为经过补偿可实现目标径向速度的精确模拟。
[0037]
下面对本发明方法实施例的适用条件进行说明。
[0038]
由于本发明方法只是对模拟器系统的机械装置部分进行了改进设计,对模拟器信号部分也只是控制距离补偿和发射信号强度,并没有引起额外的附加使用条件,因此适用条件是广泛的。
[0039]
下面结合图3对本发明方法的可行性进行分析。
[0040]
根据图3,模拟器需要模拟的目标距离为r,速度为v,角度为θ,rcs大小为σ,雷达位于o点,oo
′
连线为雷达法线方向,o
′
点为雷达法线与直线运动中心线的垂直交点。目标位于b点,运动方向与雷达法线方向的夹角为θv,为速度矢量。雷达与直线运动中心线的垂直距离为oo
′
=r0。
[0041]
模拟器为了完成目标角度θ的模拟,需要将发射天线的相位中心固定在a 点,a点为ob连线与直线运动中心线的交点,几何关系保证了∠aoo
′
=θ,从而完成了角度的模拟。
[0042]
模拟器为了完成目标距离r的模拟,需要补偿雷达与模拟器之间的物理距离变化,这里假设模拟器是对o
′
进行距离校准的。当目标移动到a点时,雷达与模拟器发射天线相位中心之间的物理距离从r0变成r0/cosθ,模拟的目标距离为 r+r0(1/cosθ-1),当补偿量δr=-r0(1/cosθ-1)时,最终模拟的目标距离为r。
[0043]
模拟器为了完成目标rcs的模拟,需要补偿雷达与模拟器之间的物理距离变化引起的大小变化,这里假设模拟器是对o
′
点进行rcs大小校准的。当目标移动到a点时,雷达与模拟器发射天线相位中心之间的物理距离从r0变成 r0/cosθ,设定的目标rcs大小为σ,在不补偿的情况下模拟的rcs大小为σ
·
cos2θ,当补偿系数αa=1/cos2θ时,完成设定的rcs大小σ的精确模拟。
[0044]
模拟器为了完成目标速度v的模拟,需要补偿雷达与模拟器之间的物理距离变化引起的多普勒大小变化。设定目标在b点的移动速度为v,则等效到a点的移动速度大小为方向为从a点到d点,由于模拟器天线只能做直线运动,为了完成角度的模拟,模拟器在直线上的物理运动速度为v
ad
在直线上的投影,大小为这个物理运动造成的多普勒大小为当补偿模拟目标的多普勒大小为时,完成设定的目标速度v的精确模拟。
[0045]
上述分析表明,模拟器精确模拟目标距离、速度、角度、rcs是可行的。
[0046]
本发明设备实施例1:77ghz频段雷达双目标模拟设备。
[0047]
77ghz频段雷达目标模拟器系统组成与应用框图如图4所示。本发明设备包括:drfm模拟器主机设备一台、接收天线与射频模块、发射天线与射频模块1、发射天线与射频模块2、转台与直线运动控制模块、转台与动子模块1、转台与动子模块2、直线滑轨组件。
[0048]
其中,drfm模拟器主机设备一台,包括:drfm模拟器系统控制中心、信号调制模块、中频发射信号模块1、中频发射信号模块2、中频接收信号模块其中drfm模拟器系统控制中心用于整个模拟器系统的运行总体控制,包括提供用户设置目标信息、显示目标信息、实时监控目标模拟的进程,将两个需要模拟的目标距离、速度、角度、rcs信息通过本发明方法的计算,得到经过补偿后的距离、速度、rcs信息,发送给信号调制模块,信号调制模块完成两路目标信息的调制,并分别输出给中频发射信号模块1和中频发射信号模块2,这两个模块完成第一级上变频、滤波和放大处理,将信号的中心频率从1ghz变到10ghz,并将信号分别发送给射频天线与射频模块1和射频天线与射频模块2。中频接收信号模块接收接收天线与射频模块输出的10ghz中频信号,经过滤波放大处理后进入信号调制模块。
[0049]
转台与直线运动控制模块与drfm模拟器系统控制中心通信,接收drfm模拟器系统控制中心实时传递过来的目标信息,经过计算得到目标1和目标2的转台控制信息和直线动子控制信息,分别发送给转台与动子模块1和转台与动子模块2。转台与动子模块1包括转台直驱电机1、转台1、直线电机动子1。转台与动子模块2包括转台直驱电机2、转台2、直线电机动子2。
[0050]
直线滑轨组件主要包括:直线电机定子与直线导轨、各种电机驱动器、电控元件、电源模块。
[0051]
接收天线与射频模块置于雷达法线处,比发射天线与射频模块高度略低,保证不对发射天线形成遮挡即可。接收天线与射频模块接收雷达发射信号,并下变频到10ghz的中心频率,然后通过射频电缆输出到中频接收信号模块。
[0052]
发射天线与射频模块1接收中频发射信号模块1输出的10ghz中心频率信号,完成对目标1信号的第二级上变频和滤波、放大处理,并辐射给雷达。发射天线与射频模块1固定在转台1上,保证发射天线的相位中心位于转台1的轴心上,这样在转台转动和直线运动时,发射天线的相位中心始终做直线运动。转台1固定在动子模块1上,接收转台与直线运动控制模块实时传递的转台控制信息,实时确保模拟器发射天线1的主瓣始终指向雷达,这一步保证了目标1 的rcs模拟的准确性。动子模块1接收转台与直线运动控制模块实时传递的直线运动控制信息,在直线导轨上完成直线运动,保证了目标1角度模拟的准确性。
[0053]
发射天线与射频模块2接收中频发射信号模块2输出的10ghz中心频率信号,完成对目标2信号的第二级上变频和滤波、放大处理,并辐射给雷达。发射天线与射频模块2固定在转台2上,保证发射天线的相位中心位于转台2的轴心上,这样在转台转动和直线运动时,发射天线的相位中心始终做直线运动。转台2固定在动子模块2上,接收转台与直线运动控制模块实时传递的转台控制信息,实时确保模拟器发射天线2的主瓣始终指向雷达,这一步保证了目标2 的rcs模拟的准确性。动子模块2接收转台与直线运动控制模块实时传递的直线运动控制信息,在直线导轨上完成直线运动,保证了目标2角度模拟的准确性。
[0054]
综上所述,本发明提供的是一种基于直线轨道和转台的雷达目标模拟方法和设备,以上仅为本发明的一个实施例而已,并非用于限定本发明的保护范围。实际上,本发明对于雷达的频段以及带宽没有任何限制,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1