弹力推拉正交位移式倾仰角测试仪及测试方法与流程
[0001]
本发明涉及角度测量领域,尤其涉及一种弹力推拉正交位移式倾仰角测试仪及测试方法。
背景技术:
[0002]
在工农业生产和服务、科学研究及日常生活中,角度或倾斜度测量是时常需要的,例如在设备安装、机械加工、建筑施工和交通运输等领域。然而,目前角度测量仪普遍存在精度低或者性价比不高的缺点,本发明旨在解决该问题。
技术实现要素:
[0003]
本发明的目的是为了提供一种弹力推拉正交位移式倾仰角测试仪及测试方法,实现倾斜度检测,检测精度高。
[0004]
为解决以上技术问题,本发明的技术方案为:弹力推拉正交位移式倾仰角测试仪,包括信号采集模块、信号转换模块和控制处理模块;
[0005]
信号采集模块,包括安装平板、倾角测试器和仰角测试器;倾角测试器和仰角测试器相互垂直且均设于安装平板上;倾角测试器包括长方形壳体、滑块、弹簧、发光管阵列和感光管阵列,长方形壳体内部中空且壳体的顶板和底板均为夹层结构;滑块和弹簧均设于壳体内,滑块位于壳体的底板上,弹簧数量为两个,两个弹簧的一端分别连接于壳体两端部,两个弹簧的另一端分别连接于滑块左右两端;发光管阵列设于壳体的底板夹层中,发光管阵列包括多个沿底板长度方向分布的发光管,感光管阵列设于长方形壳体的顶板夹层中,感光管阵列包括多个沿顶板长度方向分布的感光管,感光管用于接收发光管发射的光照,感光管和发光管一一对应;仰角测试器和倾角测试器的结构相同;
[0006]
信号转换模块包含放大滤波器和电连接于放大滤波器输出端的模数转换器,放大滤波器电连接于感光管,模数转换器输出端连接于控制处理模块;感光管输出电流输入至对应放大滤波器,放大滤波器输出低噪模拟电压并由模数转换器转换为数字电压后输出至控制处理模块;
[0007]
控制处理模块包括控制器、显示器、语音播放器和键盘;控制器电连接于发光管用于控制发光管发光,控制器电连接于模数转换器用于根据信号转换后的电信号所载光照信息进行倾仰角计算,显示器、语音播放器和键盘均电连接于控制器用于人机交互。
[0008]
按以上方案,两个弹簧的长度和弹性系数相同,滑块位于长方形壳体中间位置时,两个弹簧处于自然状态。
[0009]
按以上方案,所述仰角测试器设于安装平板上,所述安装平板上位于仰角测试器两侧的位置处各设有用于安装倾角测试器的垫块,倾角测试器的两端部底面分别位于两垫块上;所述控制器、显示器、语音播放器和键盘均设于安装平板上。
[0010]
按以上方案,所述长方形壳体长度方向上的左右两端面均为用于安装信号转换模块的夹层结构。
[0011]
弹力推拉正交位移式倾仰角测试方法,采用上述弹力推拉正交位移式倾仰角测试仪,其步骤为:
[0012]
步骤1:倾角测试器中沿壳体长度方向设为x轴,仰角测试器中沿壳体长度方向设为y轴;发光管阵列中心位置的发光管设为原点o,发光管阵列中序号为0,位于原点o的发光管两侧的发光管数量均为n-1,沿坐标轴正方向的发光管序号分别为0、1、
……
、n-1,沿坐标轴反方向的发光管序号分别为0、-1、
……
、-n+1;
[0013]
给集合和集合赋值为空集,给参数n赋初值为-n+1,其中,集合用于存放控制器读取到的倾角测试器输出电压低于预设电压门限的感光管序号集合,集合用于存放仰角测试器输出电压低于预设电压门限的感光管序号集合;n表示当前感光管序号;
[0014]
步骤2:参数n加1;
[0015]
步骤3:读取倾角测试器当前第n信号通道的模数转换器输出电压u
n
,读取仰角测试器当前第n信号通道的模数转换器输出电压v
n
;
[0016]
步骤4:判断u
n
和v
n
是否小于门限电压u
thd
,若小于,则将当前n加入到集合或中,否则,执行步骤5;
[0017]
步骤5:判断当前n是否递增至n-1,若否,则返回至步骤2,若是,则执行步骤6;
[0018]
步骤6:为不失一般性,计算倾角测试器中滑块阴影覆盖域中心的感光管序号参数和仰角测试器中滑块阴影覆盖域中心的感光管序号参数其中,其中,
[0019]
步骤7:计算倾角测试器中滑块相对原点的位移δx和仰角测试器中滑块相对原点的位移δy,其中,其中λ代表感光管间距;
[0020]
步骤8:计算倾角θ和仰角φ:
[0021][0022][0023]
其中,符号arcsin代表正弦函数的反函数,k代表弹簧的弹性系数。
[0024]
按以上方案,所述步骤4具体为:
[0025]
步骤4.1:判断u
n
是否小于门限电压u
thd
,若u
n
<u
thd
,则执行步骤4.2,否则,执行步骤4.3;
[0026]
步骤4.2:将当前n加入到集合中,即然后执行步骤4.3;
[0027]
步骤4.3:判断v
n
是否小于门限电压u
thd
,若v
n
<u
thd
,则执行步骤4.4,否则,执行步骤5;
[0028]
步骤4.4:将当前n加入到集合中,即然后执行步骤5。
[0029]
本发明具有如下有益效果:本发明采用倾角测试器和仰角测试器,倾角测试器底部设有发光管,顶部设有感光管,感光管用于接收发光管发射的光照,壳体内的滑块对发光管发射的激光进行遮挡,系统所用的部件及其结构独特;本发明根据感光管接收的光照信息获取电信号,并对电信号进行采集进行倾仰角计算,本发明倾角检测所基于的检测机理和倾仰角测试所用的算法独特,结构简单,成本低,检测精度较高,性价比高。
附图说明
[0030]
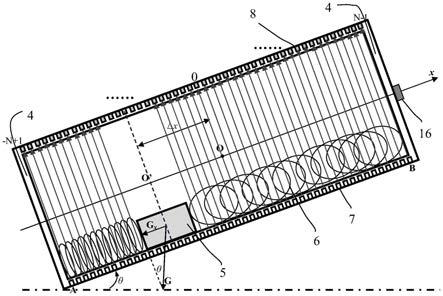
图1为本发明实施例外观结构图;
[0031]
图2为本发明倾角测试器处于水平状态的内部结构图;
[0032]
图3为本发明倾角测试器处于倾斜状态的内部结构图;
[0033]
图4为本发明实施例整体结构框图;
[0034]
图5为本发明倾仰角测试算法流程图。
[0035]
附图标记:1、安装平板;2、倾角测试器;3、仰角测试器;4、壳体;5、滑块;6、弹簧;7、发光管;8、感光管;9、控制器;10、显示器;11、语音播放器;12、键盘;13、电源;14、垫块;15、电缆;16、电缆接口。
具体实施方式
[0036]
为了使本发明的目的、技术方案及优点更加清楚明白,下面结合附图和具体实施例对本发明作进一步详细说明。
[0037]
请参考图1至图5,本发明提供一种弹力推拉正交位移式倾仰角测试仪,其包括信号采集模块、信号转换模块和控制处理模块。
[0038]
信号采集模块,包括安装平板1、倾角测试器2和仰角测试器3;倾角测试器2和仰角测试器3相互垂直且均设于安装平板1上,本实施例中,仰角测试器3设于安装平板1上,安装平板1上位于仰角测试器3两侧的位置处各设有用于安装倾角测试器2的垫块14,倾角测试器2的两端部底面分别位于两垫块14上。
[0039]
倾角测试器2包括长方形壳体4、滑块5、弹簧6、发光管阵列和感光管阵列,长方形壳体4内部中空且壳体4的顶板和底板均为夹层结构;滑块5和弹簧6均设于壳体4内,滑块5位于壳体4的底板上,底板光滑度很高以致于对滑块的摩擦力可忽略,弹簧6数量为两个,两个弹簧6的一端分别连接于壳体4两端部,两个弹簧6的另一端分别连接于滑块5左右两端,两个弹簧6的长度和弹性系数相同,滑块5位于长方形壳体4中间位置时,两个弹簧6处于自然状态;发光管阵列设于壳体4的底板夹层中,发光管阵列包括多个沿底板长度方向分布的发光管7,感光管阵列设于长方形壳体4的顶板夹层中,感光管阵列包括多个沿顶板长度方向分布的感光管8,感光管8用于接收发光管7发射的光照,感光管8和发光管7一一对应;长方形壳体4长度方向上的左右两端面均为用于安装信号转换模块的夹层结构,壳体4一侧设有用于电缆15穿过的电缆接口16。
[0040]
仰角测试器3和倾角测试器2的结构相同。
[0041]
信号转换模块包含放大滤波器和电连接于放大滤波器输出端的模数转换器,放大滤波器电连接于感光管8,模数转换器输出端连接于控制处理模块;感光管8输出电流输入至对应放大滤波器,放大滤波器输出低噪模拟电压并由模数转换器转换为数字电压后输出至控制处理模块。
[0042]
控制处理模块包括控制器9、显示器10、语音播放器11和键盘12;控制器9电连接于发光管7用于控制发光管7发光,控制器9电连接于模数转换器用于根据信号转换后的电信号所载光照信息进行倾仰角计算,显示器10、语音播放器11和键盘12均电连接于控制器9用于人机交互。控制器9通过电缆15穿过电缆接口16电连接于模数转换器,控制处理模块还包括电连接于控制器9和发光管7的发射逻辑驱动电路用于驱动发光管7发射激光和用于给控
制器9供电的电源13,本实施例中,控制器9、显示器10、语音播放器11、键盘12和电源13均设于安装平板1上,发射逻辑驱动电路所形成的电路板可安装于长方形壳体4长度方向上的左右两端面的夹层结构中。
[0043]
本发明弹力推拉正交位移式倾仰角测试方法,采用上述弹力推拉正交位移式倾仰角测试仪,具体步骤包括:
[0044]
步骤1:倾角测试器2中沿壳体4长度方向设为x轴,仰角测试器3中沿壳体4长度方向设为y轴;发光管阵列中心位置的发光管设为原点o,在发光管阵列中的序号为0,位于原点o的发光管两侧的发光管7数量均为n-1,沿坐标轴正方向的发光管序号分别为0、1、
……
、n-1,沿坐标轴反方向的发光管序号分别为0、-1、
……
、-n+1;
[0045]
给集合和集合赋值为空集,给参数n赋初值为-n+1,其中,集合用于存放,控制器9读取到的倾角测试器2输出电压低于预设电压门限的感光管序号集合,集合用于存放仰角测试器3输出电压低于预设电压门限的感光管序号集合;n表示当前感光管序号;
[0046]
步骤2:参数n加1;
[0047]
步骤3:读取倾角测试器2当前第n信号通道的模数转换器输出电压u
n
,读取仰角测试器3当前第n信号通道的模数转换器输出电压v
n
;
[0048]
步骤4:判断u
n
和v
n
是否小于门限电压u
thd
,若小于,则将当前n加入到集合或中,否则,执行步骤5;具体为:
[0049]
步骤4.1:判断u
n
是否小于门限电压u
thd
,若u
n
<u
thd
,则执行步骤4.2,否则,执行步骤4.3;
[0050]
步骤4.2:将当前n加入到集合中,即然后执行步骤4.3;
[0051]
步骤4.3:判断v
n
是否小于门限电压u
thd
,若v
n
<u
thd
,则执行步骤4.4,否则,执行步骤5;
[0052]
步骤4.4:将当前n加入到集合中,即然后执行步骤5;
[0053]
步骤5:判断当前n是否递增至n-1,若否,则返回至步骤2,若是,则执行步骤6;
[0054]
步骤6:为不失一般性,计算倾角测试器2中滑块阴影覆盖域中心的感光管序号参数和仰角测试器3中滑块阴影覆盖域中心的感光管序号参数其中,其中,
[0055]
步骤7:计算倾角测试器2中滑块5相对原点的位移δx和仰角测试器3中滑块5相对原点的位移δy,其中,其中λ代表感光管间距;
[0056]
步骤8:计算倾角θ和仰角φ:
[0057][0058][0059]
其中,符号arcsin代表正弦函数的反函数,k代表弹簧的弹性系数。
[0060]
下面给出本实施中倾角θ和仰角φ计算公式的推导过程:
[0061]
参阅图3,以倾角测试为例,标准物即本实施中滑块的重力在x方向的分量如式(1)
所示:
[0062]
g
x
=gsinθ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0063]
左、右弹簧分别对标准物产生拉、推力,二者的合力如式(2)所示:
[0064]
f
sp
=2kδx
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0065]
其中δx代表标准物相对原点的位移,下标sp代表弹簧的英文单词spring的缩写。
[0066]
当标准物达到静止状态时,受力平衡,因而式(3)成立:
[0067]
g
x
=f
sp
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0068]
联立式(1)、(2)和(3),存在式(4):
[0069]
2kδx=gsinθ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0070]
因此,倾角θ和位移δx之间,存在如式(5)所示的函数关系:
[0071][0072]
其中,符号arcsin代表正弦函数的反函数,k代表弹簧的弹性系数,δx可表示为式(6):
[0073][0074]
其中,λ代表感光管间距,代表倾角测试器中滑块阴影覆盖域中心的感光管序号参数,可表示为式(7):
[0075][0076]
其中,代表倾角测试器输出电压低于预设门限的感光管序号集合,存在式(8):
[0077][0078]
其中,和分别代表倾角测试器感光管序号集合和输出电压高于预设门限的感光管序号集合。
[0079]
同理,仰角测试器与倾角测试器原理相同,将θ和δx分别替换为φ和δy。
[0080]
倾角φ和位移δy之间,存在如式(9)所示函数关系:
[0081][0082]
其中,符号arcsin代表正弦函数的反函数,k代表弹簧的弹性系数,δy可表示为式(10):
[0083][0084]
其中,λ代表感光管间距,代表仰角测试器中滑块阴影覆盖域中心的感光管序号参数,可表示为式(11):
[0085][0086]
其中,代表仰角测试器输出电压低于预设门限的感光管序号集合,存在式(12):
[0087][0088]
其中,和分别代表仰角测试器感光管序号集合和输出电压高于预设门限的感光管序号集合。
[0089]
本发明未涉及部分均与现有技术相同或采用现有技术加以实现。
[0090]
以上内容是结合具体的实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1