水轮发电机组转子中心体垂直度调整方法与流程
[0001]
本发明属于水轮发电机组接力器安装技术领域,涉及一种水轮发电机组转子中心体垂直度调整方法。
背景技术:
[0002]
在水轮发电机组转子装配工作中,首先需要将转子中心体竖直吊装到工位机坑中。在《水轮发电机组安装技术规范(gb/t 8564-2003)》中,要求转子中心体垂直度不大于0.03mm/m;实际工作中,设备制造厂家的安装规程一般要求不大于0.02mm/m。
[0003]
转子中心体吊装到装配机坑后,其下法兰联轴平面将不可测,下导轴领也处于隐蔽位置,测量困难。
[0004]
对于转子中心体垂直度检测,目前通常采用沿转子中心体圆周对称悬挂四根重锤线,采用电测法测量完成。长期的生产实践表明,电测法的测量精度严重依赖测量人员的听力敏感度和操作经验,其测量精度及可靠性都不高,而且由于测量过程耗时较长,对转子中心体安装工期影响较大。
技术实现要素:
[0005]
本发明所要解决的技术问题是提供一种水轮发电机组转子中心体垂直度调整方法,采用三维激光跟踪测量,基准标定、坐标正形变换手段,有效解决了隐蔽部位测量的难题,明显提高了测量精度及可靠性,并且极大地提高了作业效率。
[0006]
为解决上述技术问题,本发明所采用的技术方案是:一种水轮发电机组转子中心体垂直度调整方法,它包括如下步骤:步骤1,在转子中心体吊装到机坑前对测量基准点进行标定;步骤1-1,将转子中心体稳定地放置在运输支架上,拆除包装并清扫;步骤1-2,在转子中心体上布置标志点;步骤2,基准点测量;步骤2-1,在转子中心体周围的场地上布置控制网点;步骤2-2,采用三维激光跟踪仪测量转子中心体下导轴领、上导轴领和上法兰圆柱面,以及测量下法兰联轴平面;步骤2-3,采用圆柱拟合方法获得下导轴领、上导轴领和上法兰圆柱中心点坐标,采用平面拟合方法获得下法兰联轴平面;步骤2-4,校核下导轴领、上导轴领和上法兰圆柱中心点的共线性,校核转子中心体轴线与下法兰联轴平面的垂直性;步骤2-5,采用坐标正形变换方法,根据转子中心体轴线和下法兰联轴平面建立转子中心体坐标系,获得转子中心体装配基准点,以及标志点在转子中心体坐标系中的坐标;步骤3,转子中心体垂直度调整测量;步骤3-1,将转子中心体吊装到装配机坑后,架设激光跟踪仪,依次测量转子中心体上
的标志点坐标;步骤3-2,采用坐标正形变换方法,利用标志点的两套坐标,将基准标定阶段获得的基准点引入转子中心体安装坐标系,获得垂直度调整时的基准点坐标;步骤3-3,比较转子中心体轴线两个端点坐标,获得转子中心体的垂直度参数,指导现场施工人员的调整工作,直到转子中心体垂直度调整合格。
[0007]
步骤1-2中:标志点布置在键槽的位置,以及中心体上部的上导轴领、上法兰圆柱处。
[0008]
步骤2-5中:中心体装配基准点为轴线两端点和下法兰高程基准点。
[0009]
一种水轮发电机组转子中心体垂直度调整方法,在转子中心体装配前,采用三维激光跟踪仪测量,精确标定转子中心体中心轴线和下法兰联轴平面高程,建立以中心体中心线为竖轴的坐标系,实现转子中心体装配基准标志点的转换;然后在转子中心体垂直度调整时,直接测量设置在转子中心体上的标志点坐标,再通过基准标定阶段获得的标志点坐标,采用坐标正形变换方法获得转子中心体的垂直度参数。本发明克服了原转子中心体隐蔽部位测量难的问题,具有提高测量精度和可靠性,极大地提高作业效率的特点。
附图说明
[0010]
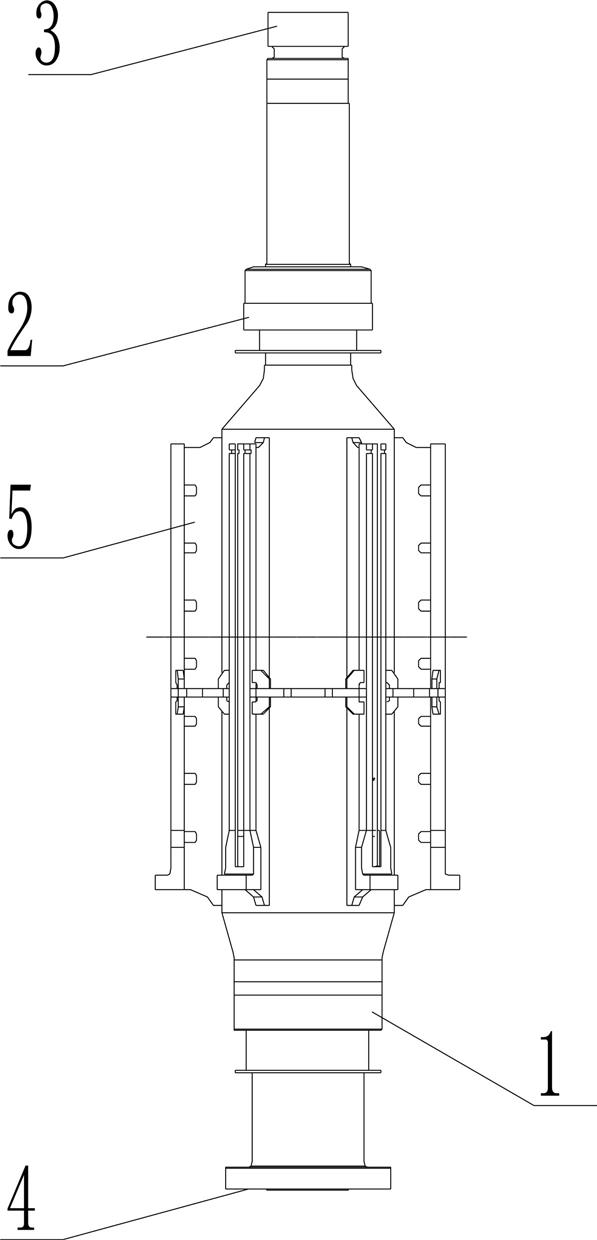
下面结合附图和实施例对本发明作进一步说明:图1为本发明转子中心体的结构示意图。
[0011]
图2为图1的俯视示意图。
[0012]
图3为本发明转子中心体在机坑中的工况图。
[0013]
图中:下导轴领1,上导轴领2,上法兰圆柱3,下法兰联轴平面4,键槽5。
具体实施方式
[0014]
如图1~图3中,一种水轮发电机组转子中心体垂直度调整方法,它包括如下步骤:步骤1,在转子中心体吊装到机坑前对测量基准点进行标定;其目的在于,避免转子中心体吊装到装配机坑后,下导轴领处于隐蔽位置,其下法兰联轴平面将不可测或者测量困难。
[0015]
步骤1-1,将转子中心体稳定地放置在运输支架上,拆除包装并清扫;步骤1-2,在转子中心体上布置标志点;其目的在于将转子中心体的测量基准点线标定在标志点上,以方便后续测量工作。
[0016]
步骤2,基准点测量;步骤2-1,在转子中心体周围的场地上布置控制网点;其目的在于方便仪器转站测量。
[0017]
步骤2-2,采用三维激光跟踪仪测量转子中心体下导轴领1、上导轴领2和上法兰圆柱3面,以及测量下法兰联轴平面4;步骤2-3,采用圆柱拟合方法获得下导轴领1、上导轴领2和上法兰圆柱3中心点坐标,采用平面拟合方法获得下法兰联轴平面4;步骤2-4,校核下导轴领1、上导轴领2和上法兰圆柱3中心点的共线性,校核转子中心体轴线与下法兰联轴平面4的垂直性;步骤2-5,采用坐标正形变换方法,根据转子中心体轴线和下法兰联轴平面4建立转子
中心体坐标系,获得转子中心体装配基准点,以及标志点在转子中心体坐标系中的坐标;步骤3,转子中心体垂直度调整测量;步骤3-1,将转子中心体吊装到装配机坑后,架设激光跟踪仪,依次测量转子中心体上的标志点坐标;步骤3-2,采用坐标正形变换方法,利用标志点的两套坐标,将基准标定阶段获得的基准点引入转子中心体安装坐标系,获得垂直度调整时的基准点坐标;此处的两套坐标指的是:第一套坐标在标定转子中心体的时候建立,此时,转子中心体处于横向放置状态;标定工作完成之后,将转子中心体吊装到装配机坑中,此时,转子中心体处于竖直状态,此时需要建立第二套坐标系,两套坐标的位置和轴线方向完全不同,需要根据标志点建立两套坐标系之间的转换关系。
[0018]
步骤3-3,比较转子中心体轴线两个端点坐标,获得转子中心体的垂直度参数,指导现场施工人员的调整工作,直到转子中心体垂直度调整合格。
[0019]
步骤1-2中:标志点布置在键槽5的位置,以及中心体上部的上导轴领2、上法兰圆柱3处。其目的在于方便后续中心体安装测量工作。
[0020]
步骤2-5中:中心体装配基准点为轴线两端点和下法兰高程基准点。
[0021]
上述的实施例仅为本发明的优选技术方案,而不应视为对于本发明的限制,本申请中的实施例及实施例中的特征在不冲突的情况下,可以相互任意组合。本发明的保护范围应以权利要求记载的技术方案,包括权利要求记载的技术方案中技术特征的等同替换方案为保护范围。即在此范围内的等同替换改进,也在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1