一种机载光谱遥感监测臭氧浓度的方法及系统与流程
[0001]
本发明涉及高光谱遥感技术领域,尤其涉及一种机载光谱遥感监测臭氧浓度的方法及系统。
背景技术:
[0002]
臭氧是地球大气中十分重要但又非常特殊的微量气体,它是影响对流层、平流层大气动力、热力、辐射、化学等过程的重要成分之一。大气层中,90%的臭氧集中于平流层,减少太阳光到达地球表面的紫外辐射,是地球上的生物赖以生存的保护层。另外10%的臭氧存在于对流层中,对人体有害,臭氧污染是目前影响城市空气质量的主要污染因子之一。因此,了解和监测平流层中臭氧浓度变化及分布情况,对空气质量预防和治理是十分重要的。
技术实现要素:
[0003]
本发明提供一种机载光谱遥感监测臭氧浓度的方法及系统,主要解决的技术问题是:如何监测平流层中臭氧浓度变化及分布情况。
[0004]
为解决上述技术问题,本发明提供一种机载光谱遥感监测臭氧浓度的方法,包括:
[0005]
利用臭氧对紫外波段吸收的原理,通过光谱相机对待检测空域进行遥感监测,获取目标紫外辐射亮度值;
[0006]
利用遥感反演算法计算近地面臭氧浓度;
[0007]
叠加卫星地图形成近地面的臭氧分布热力图。
[0008]
进一步的,所述紫外波段采用260~320纳米。
[0009]
进一步的,所述通过光谱相机对待检测空域进行遥感监测包括:按照设定平面分块大小对所述待检测空域所在平面进行分块,针对每一分块通过光谱相机随机采集若干个不同位置点的紫外辐射亮度值,并计算平均值,作为该分块的目标紫外辐射亮度值。
[0010]
进一步的,所述设定平面分块大小为1km*1km、2km*2km、3km*3km、5km*5km、10km*10km中的一种。
[0011]
进一步的,所述遥感反演算法采用基于随机变量高斯分布假设并利用贝叶斯公式的最优化方法。
[0012]
进一步的,所述光谱相机搭载于无人机上,基于无人机控制实现路线自动巡回以及数据采集。
[0013]
本发明还提供一种机载光谱遥感监测臭氧浓度的系统,包括:
[0014]
数据采集模块,用于利用臭氧对紫外波段吸收的原理,通过光谱相机对待检测空域进行遥感监测,获取目标紫外辐射亮度值;
[0015]
计算模块,用于利用遥感反演算法计算近地面臭氧浓度;
[0016]
处理模块,用于叠加卫星地图形成近地面的臭氧分布热力图;
[0017]
显示模块,用于显示臭氧分布热力图。
[0018]
进一步的,所述数据采集模块用于按照设定平面分块大小对所述待检测空域所在平面进行分块,针对每一分块通过光谱相机随机采集若干个不同位置点的紫外辐射亮度值,并计算平均值,作为该分块的目标紫外辐射亮度值。
[0019]
进一步的,所述设定平面分块大小为1km*1km、2km*2km、3km*3km、5km*5km、10km*10km中的一种。
[0020]
进一步的,所述遥感反演算法采用基于随机变量高斯分布假设并利用贝叶斯公式的最优化方法。
[0021]
本发明的有益效果是:
[0022]
根据本发明提供的一种机载光谱遥感监测臭氧浓度的方法及系统,利用臭氧对紫外波段吸收的原理,通过光谱相机对待检测空域进行遥感监测,获取目标紫外辐射亮度值;利用遥感反演算法计算近地面臭氧浓度;叠加卫星地图形成近地面的臭氧分布热力图。实现了对流层,尤其是近地面臭氧浓度的快速监测,并直观展示。
附图说明
[0023]
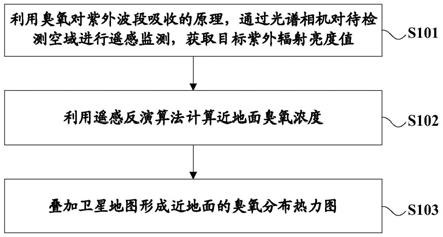
图1为本发明实施例一的机载光谱遥感监测臭氧浓度的方法流程示意图;
[0024]
图2为本发明实施例一的无人机飞行路径示意图;
[0025]
图3为本发明实施例二的机载光谱遥感监测臭氧浓度的系统结构示意图。
具体实施方式
[0026]
为了使本发明的目的、技术方案及优点更加清楚明白,下面通过具体实施方式结合附图对本发明作进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
[0027]
实施例一:
[0028]
本实施例提供一种机载光谱遥感监测臭氧浓度的方法,请参见图1,该方法包括如下步骤:
[0029]
s101、利用臭氧对紫外波段吸收的原理,通过光谱相机对待检测空域进行遥感监测,获取目标紫外辐射亮度值。
[0030]
本实施例中,光谱相机紫外波段采用260~320纳米,因为近地面臭氧对该波段的紫外敏感性更高。
[0031]
为了提高数据采集效率,扩展本方案对不同应用场景的适用性,可将光谱相机搭载于无人机上,基于无人机控制实现路线自动巡回以及数据采集。
[0032]
具体的,可以利用两架无人机实现数据采集,其中一架无人机用于搭载紫外发射装置,用于发射固定频率、固定能量的紫外波段,另一架无人机用于搭载光谱相机,用于接收紫外波段,检测接收到的紫外辐射亮度值。两架无人机可采用一台遥控器实现同步飞行,便于对准,两架无人机在水平高度方向间隔一定距离同步飞行,从而实现对紫外波段的对准接收,保证数据采集有效性。
[0033]
为了降低不同时刻太阳辐射紫外光强弱存在差异以及大气环境存在干扰(例如不同位置受云层厚度、空气中悬浮污染物浓度等)的影响,本实施例中,当接收到紫外发射装置发射的紫外波段得到总的紫外辐射亮度值时,关闭紫外发射装置,进一步利用光谱相机
检测太阳紫外辐射,将总的紫外辐射亮度值减去太阳紫外辐射亮度,得到实际的紫外辐射亮度值。
[0034]
在本发明的其他实施例中,还可以基于光谱相机检测紫外发射装置所发出紫外波段的散射参数值,基于紫外散射参数进行臭氧浓度的反演,从而也可以得到臭氧浓度分布。
[0035]
在利用光谱相机进行遥感监测时,可以按照设定平面分块大小对待检测空域所在平面进行分块,针对每一分块通过光谱相机随机采集若干个不同位置点的紫外辐射亮度值,并计算平均值,作为该分块的目标紫外辐射亮度值。提高数据采集的有效性和准确性。
[0036]
其中,设定平面分块大小例如设置为1km*1km、2km*2km、3km*3km、5km*5km、10km*10km等,具体可根据实际需求灵活设置。
[0037]
可选的,基于待检测空域分块情况,可以设置无人机飞行路径,尽可能减少无人机的飞行距离,提高数据采集效率。请参见图2所示,图2a示出了一种圆形飞行路径,图2b示出了一种s形飞行路径。
[0038]
s102、利用遥感反演算法计算近地面臭氧浓度。
[0039]
本实施例中,遥感反演算法采用基于随机变量高斯分布假设并利用贝叶斯公式的最优化方法(optimization techniques,oe)。具体过程如下:
[0040]
假设光谱相机紫外辐射亮度测量过程为
[0041]
y=f(x,b)+ε
ꢀꢀ
(1)
[0042]
其中,y为辐射亮度,f为辐射传输物理过程,x为大气臭氧廓线,b为正演过程必备参数,ε为误差随机变量。
[0043]
反演过程为式(1)的反推过程,表达如下:
[0044][0045]
式中,表示最佳估计量,表示估计的最佳前项模型参数,x
a
为臭氧廓线的先验状态,c为其他必备系数。
[0046]
融合正演模型的反演表达:
[0047][0048]
由于式(3)中的物理模型f是不可知的,并且b也是不可能全部被掌握,因此采用简化物理模型f代替,得到以下等式:
[0049][0050]
其中,
△
f为简化物理模型f与真实物理模型f差异产生的计算误差。由于x为b’是不可知的,因此令x=x
a
,那么上式可表示为:
[0051][0052]
其中,对上式反演函数r进行线性化,得到以下等式:
[0053][0054]
其中,表示臭氧廓线对车辆数据的敏感性。
[0055]
由于大气辐射传输过程,即大气臭氧廓线与测量辐射亮度之间为非线性关系,因此无法得到整个反演过程中的权重函数矩阵,那么得到辐射亮度向量y条件下的臭氧廓线概率密度分布函数仅能表示为:
[0056][0057]
上式(7)为非线性反演过程,权重函数矩阵k无法给出具体形式,仅能由大气辐射传输模型f来确定,本实施例采用最优化算法,以便寻找臭氧廓线的最优解由此,未获得最大后验概率密度,令式(7)中概率密度分布函数的导数为零:
[0058][0059]
其中,是关于x的梯度,为f(x)的雅克比矩阵。一般的,可选用牛顿迭代法完成对臭氧x的求解。牛顿迭代方程如下:
[0060][0061]
其中,g为式(8)。即海森矩阵(hessian matrix),表达式如下:
[0062][0063]
其中,k为因此该迭代方法也称为海森(hessian)反演法,该方法涉及到前向模型的一阶导数,雅可比矩阵k,以及它的二阶导数由于[y-f(x)]项的存在会是的迭代运算的代价过高,并且该项描述的是噪声和非线性误差的影响,其在解中所占的比重很小,因而,忽略[y-f(x)]项,将式(8)和式(10)带入式(9),得到如下关系:
[0064][0065]
式中,k
i
为k(xi)。为了进一步明确x
i+1
与x
a
的关系,对上述关系整理得:
[0066][0067]
上式即是对大气臭氧廓线x反演过程的公式化表达,也是非线性条件下式(6)的具体表现,式中参数同上述等式。这也表明,以等式(12)为反演运算核心,根据测量向量y,选取合适的先验臭氧廓线x
a
,先验大气臭氧廓线协方差矩阵sa,测量误差协方差矩阵s
ε
,以及先验权重函数矩阵ka,即可得到新的大气臭氧廓线x
i
,即不同高度的臭氧浓度,并逐渐接近最优状态向量。
[0068]
s103、叠加卫星地图形成近地面的臭氧分布热力图。
[0069]
基于待检测空域的经纬度信息,以及各个监测点的臭氧浓度数据,叠加到卫星地图,即可形成该区域的臭氧分布热力图。其中,臭氧浓度高低可通过热力图颜色予以区别显示。
[0070]
根据本实施例的机载光谱遥感监测臭氧浓度的方法,利用臭氧对紫外波段吸收的原理,通过光谱相机对待检测空域进行遥感监测,获取目标紫外辐射亮度值;利用遥感反演算法计算近地面臭氧浓度;叠加卫星地图形成近地面的臭氧分布热力图。实现了对流层,尤其是近地面臭氧浓度的快速监测,并直观展示。
[0071]
实施例二:
[0072]
本实施例在上述实施例一的基础上,提供一种机载光谱遥感监测臭氧浓度的系统,用以实现上述实施例一中所述的机载光谱遥感监测臭氧浓度的方法的步骤,请参见图3,该系统主要包括如下功能模块:
[0073]
数据采集模块31,用于利用臭氧对紫外波段吸收的原理,通过光谱相机对待检测空域进行遥感监测,获取目标紫外辐射亮度值;
[0074]
计算模块32,用于利用遥感反演算法计算近地面臭氧浓度;
[0075]
处理模块33,用于叠加卫星地图形成近地面的臭氧分布热力图;
[0076]
显示模块34,用于显示臭氧分布热力图。
[0077]
数据采集模块31用于按照设定平面分块大小对待检测空域所在平面进行分块,针对每一分块通过光谱相机随机采集若干个不同位置点的紫外辐射亮度值,并计算平均值,作为该分块的目标紫外辐射亮度值。
[0078]
其中,设定平面分块大小为1km*1km、2km*2km、3km*3km、5km*5km、10km*10km中的一种。
[0079]
本实施例中,计算模块32所采用的遥感反演算法为基于随机变量高斯分布假设并利用贝叶斯公式的最优化方法。具体请参见上述实施例一中的描述,在此不再赘述。
[0080]
显然,本领域的技术人员应该明白,上述本发明的各模块或各步骤可以用通用的计算装置来实现,它们可以集中在单个的计算装置上,或者分布在多个计算装置所组成的网络上,可选地,它们可以用计算装置可执行的程序代码来实现,从而,可以将它们存储在计算机存储介质(rom/ram、磁碟、光盘)中由计算装置来执行,并且在某些情况下,可以以不同于此处的顺序执行所示出或描述的步骤,或者将它们分别制作成各个集成电路模块,或者将它们中的多个模块或步骤制作成单个集成电路模块来实现。所以,本发明不限制于任何特定的硬件和软件结合。
[0081]
以上内容是结合具体的实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1