低损耗机载气象雷达伺服传动平台的制作方法
1.本发明属电子设备技术领域,特别涉及一种机载气象雷达伺服传动平台,可用于各种飞行器的雷达天线机械扫描控制。
背景技术:
2.机载气象雷达伺服传动平台是机载气象雷达搜索、捕获目标并跟踪、测定目标所在位置及各种运动参数的机电一体化设备,其按照雷达系统给定的运动规律驱动雷达天线在俯仰、方位维运动,使雷达实现去捕获、跟踪目标的功能,同时伺服传动平台把俯仰、方位维角度运动信息反馈给雷达系统,使雷达系统能够精确判断目标位置,当飞行器在航向过程中做出横滚、俯仰、偏航等飞行姿态时,为了保证雷达天线扫描空域不发生变化,伺服传动平台驱动雷达天线运动做出相应的补偿以消除飞行器因姿态变化而造成的影响。
3.现有机载气象雷达伺服传动平台多采用电机加减速箱或电机直接驱动的传动方式,减速箱一般为多级定轴齿轮传动,大传动比的多级定轴齿轮减速箱体积大、重量重、传动精度差、总回差大。电机直接驱动的传动方式虽说省去了中间的减速机构,但却需选用大力矩电机,而大力矩电机的外形尺寸大,其电机需要更大的空间去安装。同时由于机载气象雷达的收发模块和雷达天线往往是作为两个分机,不能紧贴安装,因此增加了传输路径距离和损耗。
技术实现要素:
4.本发明的目的在于针对上述现有技术的不足,提出一种低损耗机载气象雷达伺服传动平台,以减小伺服传动平台的体积、降低重量和总回差、提高伺服传动精度和控制性能,缩短微波传输路径,降低整机损耗。
5.本发明的技术思路是:通过采用无刷直流伺服电机加行星减速器和一级减速齿轮副的传动方式驱动雷达天线在俯仰、方位维按给定的规律运动,通过采用闭环控制对运动参数进行精确控制;通过将收发模块和雷达天线两者之间采用波导盲插的连接方式,缩短了微波传输路径,降低了整机损耗。
6.根据上述技术思路,本发明的低损耗机载气象雷达伺服传动平台,包括俯仰传动单元1、方位传动单元2、基座3、收发模块4、阵列天线5和垫块6,该俯仰传动单元1和方位传动单元2安装在基座3上,该收发模块4和阵列天线5连接后安装在俯仰传动单元1上,其特征在于:
7.所述俯仰传动单元1,包括俯仰电机11、俯仰减速器12、俯仰减速齿轮副13、俯仰角度电位器14和俯仰构件15;该俯仰电机11为无刷直流伺服电机,该俯仰减速器12为行星减速器,该俯仰减速齿轮副13为一级齿轮传动,该俯仰减速器12和俯仰减速齿轮副13共同形成俯仰传动单元1的减速机构。
8.所述方位传动单元2,包括方位电机21、方位减速器22、方位减速齿轮副23、方位角度电位器24、方位构件25、左叉臂26、右叉臂27和驱动箱28;该方位电机21为无刷直流伺服
电机,该方位减速器22为行星减速器,该方位减速齿轮副23为一级齿轮传动,该方位减速器22和方位减速齿轮副23共同形成方位传动单元2的减速机构,该左叉臂26、右叉臂27和驱动箱28分别安装在基座3上。
9.所述收发模块4位于阵列天线5的正下方,安装在伺服传动平台的上端,两者之间填充有导热介质,并通过波导盲插连接,以缩短两者之间传输路径,降低整机损耗。
10.进一步,俯仰传动单元1中的俯仰电机11与俯仰减速器12采用间隙配合安装在俯仰构件15上,其俯仰减速齿轮副13的一端固定在俯仰构件15上,另一端紧固在俯仰减速器12的输出轴上,该俯仰构件15的旋转轴与俯仰角度电位器14的旋转轴同心连接。
11.进一步,方位传动单元2中的方位电机21与方位减速器22采用间隙配合安装在方位构件25上,其方位减速齿轮副23的一端固定在方位构件25上,另一端紧固在方位减速器22的输出轴上,该方位构件25的旋转轴与方位角度电位器24的旋转轴同心连接。
12.进一步,所述基座3采用底部截面为圆形,上部截面为椭圆形的一体结构,用作整个伺服传动平台的支撑。
13.进一步,所述收发模块4与基座3的内部之间通过三根电缆分别传输时钟、中频及控制信号,该三根电缆整理固定后从俯仰构件15的旋转轴中心孔进入方位构件25和左叉臂26的旋转轴中心孔,经固定后进入基座3的内部。
14.本发明与现有技术相比具有如下优点:
15.1.本发明由于在俯仰传动单元1和方位传动单元2上采用了一级齿轮副加行星减速器的减速机构,减小了伺服传动平台的体积、降低了伺服传动平台的重量和总回差、提高了伺服传动平台的精度和传动效率。
16.2.本发明在俯仰传动单元1中的俯仰电机11和方位传动单元2中的方位电机21均采用无刷直流伺服电机,由于无刷直流伺服电机具有响应快、速度高、惯量小的特点,因而实现了伺服传动的闭环控制,提高了伺服传动平台的精度。
17.3.本发明由于在收发模块4和阵列天线5之间采用波导盲插的方式连接,缩短了微波传输路径,降低了整机损耗。
18.4.本发明的收发模块4与基座3之间的三根电缆,由于采用从俯仰构件15的旋转轴中心孔进入方位构件25和左叉臂26的旋转轴中心孔的走线方式,改善了电缆在平台转动过程中的受力情况。
附图说明
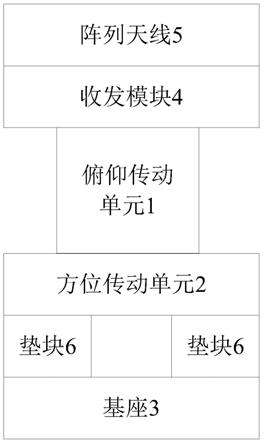
19.图1为本发明的整体框图;
20.图2为本发明的整体结构图;
21.图3为本发明中的俯仰传动单元剖解图;
22.图4为本发明中的方位传动单元剖解图。
具体实施方式
23.以下结合附图对本发明的实例作进一步详细描述。
24.参照图1,本发明的伺服传动平台,包括俯仰传动单元1、方位传动单元2、基座3、收发模块4、阵列天线5和垫块6;该俯仰传动单元1和方位传动单元2安装在基座3上,该收发模
块4和阵列天线5连接后安装在俯仰传动单元1上,当该方位传动单元2与基座3的接触面上添加有垫块6时,可以满足大尺寸雷达天线转动范围的要求。当伺服传动平台接收到控制指令和数据信号时,俯仰传动单元1和方位传动单元2在俯仰、方位维带动阵列天线5进行空域扫描,从而捕获、跟踪目标,同时俯仰传动单元1和方位传动单元2实时将角度、速度数据反馈回基座3内部与期望值进行比较并修正,使伺服传动平台形成一个闭环控制系统。
25.参照图2,对本实例的结构细节描述如下:
26.所述俯仰传动单元1,包括俯仰电机11、俯仰减速器12、俯仰减速齿轮副13、俯仰角度电位器14和俯仰构件15;该俯仰电机11为无刷直流伺服电机,该俯仰减速器12为行星减速器,该俯仰减速齿轮副13为一级齿轮传动,该俯仰减速器12和俯仰减速齿轮副13共同形成俯仰传动单元1的减速机构,俯仰电机11与俯仰减速器12采用间隙配合安装在俯仰构件15上,其俯仰减速齿轮副13的一端固定在俯仰构件15上,另一端紧固在俯仰减速器12的输出轴上,该俯仰构件15的旋转轴与俯仰角度电位器14的旋转轴同心连接。俯仰电机11启动后经俯仰减速器12和俯仰减速齿轮副13按给定的运动规律驱动阵列天线5在俯仰维运动,俯仰角度电位器14实时监测俯仰维运动角度和速度并及时将俯仰角度和速度信息反馈给基座3内部与期望值进行比较并修正。
27.所述方位传动单元2,包括方位电机21、方位减速器22、方位减速齿轮副23、方位角度电位器24、方位构件25、左叉臂26、右叉臂27和驱动箱28;该方位电机21为无刷直流伺服电机,该方位减速器22为行星减速器,该方位减速齿轮副23为一级齿轮传动,该方位减速器22和方位减速齿轮副23共同形成方位传动单元2的减速机构,方位电机21与方位减速器22采用间隙配合安装在驱动箱28上,其方位减速齿轮副23的一端固定在方位构件25上,另一端紧固在方位减速器22的输出轴上,该方位构件25的旋转轴与方位角度电位器24的旋转轴同心连接;该左叉臂26和右叉臂27成八字形左右对称横跨在基座3的安装面上,用于实现俯仰传动单元1与方位传动单元2的连接,该驱动箱28安装在基座3上。方位电机21启动后经方位减速器22和方位减速齿轮副23按给定的运动规律驱动阵列天线5在方位维运动,方位角度电位器24实时监测方位维运动角度和速度并及时将方位角度和速度信息反馈给基座3内部与期望值进行比较并修正。
28.所述基座3采用底部截面为圆形,上部截面为椭圆形的一体结构,用作整个伺服传动平台的支撑。
29.所述收发模块4位于阵列天线5的正下方,两者之间填充有导热介质,并通过波导盲插连接后安装在俯仰构件15上,以缩短两者之间传输路径,降低整机损耗。
30.收发模块4与基座3的内部之间通过三根电缆分别传输时钟、中频及控制信号,该三根电缆整理固定后从俯仰构件15的旋转轴中心孔进入方位构件25和左叉臂26的旋转轴中心孔,经固定后进入基座3的内部。
31.参照图3,所述俯仰减速齿轮副13,包括俯仰减速齿轮131和俯仰减速齿轮132。
32.所述俯仰构件15,包括俯仰支架151、方位支架152、端盖153、半圆环154、角接触轴承155、挡板156和调整垫片157;该角接触轴承155,其内圈过盈配合安装在俯仰支架151左右两端旋转轴上,并通过半圆环154的安装孔与方位支架152连接,其外圈下半部分安装在方位支架152的相应半圆位置处,上半部分与半圆环154配合安装,以通过轴肩接触对角接触轴承155的外圈起限位作用,该挡板156安装在角接触轴承155的内圈上,以防止角接触轴
承155的内圈轴向窜动,该调整垫片157填充在挡板156和角接触轴承155的内圈之间,该端盖153安装在方位支架152和半圆环154上。
33.该俯仰减速齿轮131与俯仰支架151的旋转轴间隙配合安装,并通过半圆环154固定在方位支架152上,该俯仰减速齿轮132与俯仰减速器12的输出轴紧配合连接。
34.参照图4.所述方位减速齿轮副23,包括方位减速齿轮231和方位减速齿轮232。
35.所述方位构件25,包括端盖251、角接触轴承252、挡板253、调整垫片254和方位支架255;该角接触轴承252的内圈安装在方位支架255左右两端旋转轴上,外圈过盈配合安装在左叉臂26和右叉臂27相应孔中,以通过轴肩接触对角接触轴承252的外圈起限位作用,该挡板253安装在角接触轴承252的内圈上,以防止角接触轴承252的内圈轴向窜动,该调整垫片254填充在挡板253和角接触轴承252的内圈之间,该端盖251安装在左叉臂26和右叉臂27上。
36.该方位减速齿轮231定位后安装在方位支架255上,且两者的旋转轴中心重合,该方位减速齿轮232与方位减速器22的输出轴紧配合连接。
37.以上描述仅是本发明的一个具体实例,并未构成对本发明的任何限制,显然对于本领域的专业人员来说,在了解了本发明内容和原理后,都可能在不背离本发明原理、结构的情况下,进行形式和细节上的各种修改和改变,但是这些基于本发明思想的修正和改变仍在本发明的权利要求保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1