一种SV自动检测装置、检测系统、检测方法、污水处理装置与流程
一种sv自动检测装置、检测系统、检测方法、污水处理装置
技术领域
1.本发明公开涉及污水检测领域,尤其涉及一种sv自动检测装置、检测系统、检测方法、污水处理装置。
背景技术:
2.污泥沉降比(sv)是指将混匀的曝气池活性污泥混合液迅速倒进100ml量筒中至满刻度,静置沉淀30分钟后,则沉淀污泥与所取混合液之体积比为污泥沉降比(%),又称污泥沉降体积(sv30)以ml/l表示。该指标反应曝气池运行过程的污泥量,可控制、调节活性污泥的排放量,它还是污泥膨胀等异常现象的直观反应。
3.目前,采用拍照然后自动识别的方式不可行,系统体积较大,需要编程,总体价值较高,因此设计一种采用对射光电识别法可有效侦测沉淀后污泥界面位置,准确度较高的检测装置是亟待解决的问题。
技术实现要素:
4.为克服相关技术中存在的问题,本发明公开实施例提供了sv自动检测装置、检测系统、检测方法、污水处理装置。所述技术方案如下:
5.根据本发明公开实施例的第一方面,提供一种sv自动检测装置,包括进液管和出液管,该sv自动检测装置包括:
6.检测管,所述检测管的两端开放,所述检测管的进液端与进液管相对接,所述检测管的出液端与出液管相连接;
7.至少一个红外发射器以及至少一个红外接收器,所述红外发射器位于检测管的一侧,所述红外接收器位于检测管的另一侧,所述红外发射器的发射端与红外接收器的接收端相对设置,其中,
8.所述红外发射器沿检测管的轴线上下运动,所述红外接收器与红外发射器同步运动;
9.或所述红外发射器沿检测管的轴线上下运动,所述红外接收器位于检测管一侧的固定位置;
10.或红外发射器与红外接收器分别固定于检测管的两侧;
11.清洁组件,所述清洁组件包括清洗活塞,所述清洗活塞伸入或脱离检测管的内腔。
12.在一个实施例中,还包括第一装配辅助件,所述第一装配辅助件包括:
13.滑道,所述滑道平行设置于检测管的一侧;
14.步进电机,所述步进电机设置在滑道的上端,且步进电机的伸缩轴与滑道相平行;
15.支撑部,所述支撑部设置在步进电机的伸缩轴上,且沿滑道的长度方向往复运动。
16.在一个实施例中,所述支撑部包括两端向靠近检测管的侧壁的方向延伸的安装座,所述安装座的一对侧壁之间形成检测区,所述安装座的其中一个侧翼上安装红外发射器,所述安装座的其中另一个侧翼上安装红外接收器,所述红外发射器发出的光线,横向穿
过检测管进入红外接收器,所述红外发射器为红外点状发射器,所述红外接收器为红外点状接收器。
17.在一个实施例中,所述支撑部包括固定于步进电机伸缩端的运动板,与检测管侧壁相对的所述运动板的表面设有红外发射器,所述红外发射器为红外点状发射器。
18.在一个实施例中,还包括固定板,所述固定板设置于检测管另一侧,与检测管侧壁相对的所述固定板的表面设有红外接收器,所述红外接收器为红外光栅接收器,所述红外光栅接收器的信号接收感应区不小于检测管的长度。
19.在一个实施例中,还包括第二装配辅助件,所述第二装配辅助件包括第一支撑板以及第二支撑板,所述第一支撑板和所述第二支撑板关于检测管对称设置,与检测管侧壁相对的所述第一支撑板的表面设有红外发射器,与检测管侧壁相对的所述第二支撑板的表面设有红外接收器。
20.在一个实施例中,所述红外发射器为红外光栅发射器,所述红外接收器为红外光栅接收器。
21.根据本公开实施例的第一方面,提供一种安装根上述的sv自动检测装置的检测系统,该系统包括:
22.sv自动检测装置;
23.污水上水装置,所述污水上水装置与sv自动检测装置的进液管相连接;
24.污水回水装置,所述污水回水装置与sv自动检测装置的出液管相连接;
25.报警装置,所述报警装置与sv自动检测装置相连接。
26.根据本公开实施例的第一方面,提供一种适用于上所述的sv自动检测装置的检测方法,该方法包括以下步骤:
27.步骤一、获取红外接收器的检测信号;
28.步骤二、获取步进电机的旋转圈数,计算步进电机的行程或计算检测信号的接收比例
29.步骤三、判断污泥沉降比sv是否正常,若正常,则等待下次检测;若异常,则进入步骤四;
30.步骤四:调整剩余污泥泵运行频率以及污泥回流泵运行频率。
31.根据本公开实施例的第一方面,提供一种利用上述的sv自动检测方法的污水处理装置,所述污水处理装置包括:
32.sv自动检测系统;
33.混凝池,所述混凝池的出液端与sv自动检测系统的污水上水装置相连接;所述混凝池的回液端与sv自动检测系统的污水回水装置相连接;
34.至少一个剩余污泥泵,所述剩余污泥泵通过管道与混凝池相连接;
35.至少一个污泥回流泵,所述污泥回流泵通过管道与混凝池相连接;
36.sv自动检测系统的sv自动检测装置的控制端分别与至少一个剩余污泥泵和至少一个污泥回流泵电性连接。
37.本发明公开的实施例提供的技术方案可以包括以下有益效果:采用对射光电识别法可有效侦测沉淀后污泥界面位置,准确度较高。市场中微型光电探头品类繁多非常成熟易于获得,且价格较低。据此确定采用光电法研制该系统。
38.当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
附图说明
39.此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本公开的实施例,并与说明书一起用于解释本公开的原理。
40.图1是本发明所述实施例一的一种sv自动检测装置的第一结构示意图;
41.图2是本发明所述实施例一的一种sv自动检测装置的第二结构示意图;
42.图3是本发明所述实施例一的一种sv自动检测装置的第三结构示意图;
43.图4是图2的a部放大图;
44.图5是图3的b部放大图;
45.图6是图1的c部放大图;
46.图7是本发明所述实施例一的活塞管的剖面图;
47.图8是实施例三的结构示意图;
48.图9是本发明所述污水处理装置的结构示意图;
49.图10是本发明所述污水处理装置的工作流程图;
50.附图标记:
51.101、进液管
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
102、出液管
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
201、第一水阀
52.202、第二水阀
ꢀꢀꢀꢀꢀꢀꢀꢀ
3、检测管
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
401、红外点状发射器
53.402、红外点状接收器
ꢀꢀ
403、步进电机
ꢀꢀꢀꢀꢀꢀꢀꢀ
404、连接杆
54.405、滑块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
406、安装座
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
501、滑道
55.502、第一连接座
ꢀꢀꢀꢀꢀꢀ
503、第二连接座
ꢀꢀꢀꢀꢀꢀ
6、清洁活塞
56.701、红外光栅发射器
ꢀꢀ
702、红外光栅接收器
ꢀꢀ
801、第一支撑板
57.802、第二支撑板
ꢀꢀꢀꢀꢀ
9、固定板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
10、箱体
58.11、进液泵
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12、电动阀门
ꢀꢀꢀꢀꢀꢀꢀꢀ
13、液晶显示屏
59.14、活塞管
具体实施方式
60.这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本公开相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本公开的一些方面相一致的装置和方法的例子。
61.本发明公开实施例所提供的技术方案涉及sv自动检测装置,尤其涉及污泥检测领域。在相关技术中,采用拍照然后自动识别的方式不可行,系统体积较大,需要编程,总体价值较高。基于此,本公开技术方案所提供的sv自动检测装置,基本实现混凝沉淀系统的自动控制,当前还未发现具有该功能的国产系统,可以填补国内空白。
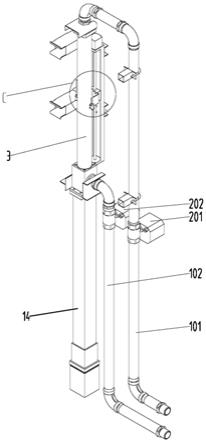
62.图1示例性示出了本发明公开技术方案所提供的sv自动检测装置的结构示意图。根据图1至图6可知,包括进液管101和出液管102,该sv自动检测装置包括:检测管3,所述检测管3的两端开放,所述检测管3的进液端与进液管101相对接,所述检测管3的出液端与出
液管102相连接;至少一个红外发射器以及至少一个红外接收器,所述红外发射器位于检测管3的一侧,所述红外接收器位于检测管3的另一侧,所述红外发射器的发射端与红外接收器的接收端相对设置,其中,所述红外发射器沿检测管3的轴线上下运动,所述红外接收器与红外发射器同步运动;或所述红外发射器沿检测管3的轴线上下运动,所述红外接收器位于检测管3一侧的固定位置;或红外发射器与红外接收器分别固定于检测管3的两侧;清洁组件,所述清洁组件包括清洗活塞,所述清洗活塞伸入或脱离检测管3的内腔,需要进一步指出的是,与检测管3相连接的进水管上设有第一水阀201,与检测管3相连接的出水管上设有第二水阀202,第一水阀201和第二水阀202均为220v电磁球阀;检测管3为可从外部进行观察、具有透光性能的石英玻璃管;清洁活塞6可以是具有一定弹性,且伸入检测管3后与检测管3的内壁过盈插装的活塞结构,该活塞可以是人工动力或者电控动力,即自动清洗系统的原理就是采用类似气缸活塞具有清理缸筒内壁的原理一样,采用一根电动推杆推动置于玻璃管内的活塞做周期运动达到清理玻璃管内壁的效果。该系统需增加电动推杆一个,活塞一套,控制点响应增加,且由下向上插入检测管3,由上向下脱离检测管3,其运动方向沿检测管3的轴线运动。
63.实施例一,如图1至图6所示:
64.一种sv自动检测装置,包括进液管101和出液管102,该sv自动检测装置包括:检测管3,所述检测管3的两端开放,所述检测管3的进液端与进液管101相对接,所述检测管3的出液端与出液管102相连接;一个红外点状发射器401以及一个红外点状接收器402,所述红外点状发射器401位于检测管3的一侧,所述红外点状接收器402位于检测管3的另一侧,所述红外点状发射器401的发射端与红外点状接收器402的接收端相对设置,其中,所述红外点状发射器401沿检测管3的轴线上下运动,所述红外点状接收器402与红外点状发射器401同步运动,需要进一步指出的是,红外点状发射器401选用型号为ee
‑
spw321的激光发射器以及型号为ee
‑
spw421的红外点状接收器402,激光发射器和激光接收器为对射型,遮光时on,如光时off,导线总长2米,作为投光器的激光发射器和作为受光器激光接收器到放大器的导线长0.5米。
65.优选的,装配辅助件包括:滑道501,滑道501平行设置于检测管3的一侧;步进电机403,步进电机403设置在滑到的上端,且步进电机403的伸缩轴与滑道501相平行;支撑部,支撑部设置在步进电机403的伸缩轴上,且沿滑道501的长度方向往复运动,需要进一步指出的是,滑道501为304不锈钢支架为基础,折弯形成的两端设有限位部的轨道结构,其延伸方向与检测管3的轴线方向平行;支撑部位于步进电机403的伸缩轴上,支撑部沿滑道501形成的限位槽往复运动,运动过程稳定,运动路线固定。
66.示例中,步进电机403的伸缩端设有连接杆404,连接杆404通过滑块405与支撑部进行相互固定,滑块405嵌装于滑道501内,且沿滑道501的长度方向往复运动。所述滑道501的上端固定安装有第一连接座502,所述滑道501的下端固定安装有第二连接座503。
67.示例中,检测管3的出液端与进液管101相连接,其中进液管101上设有第一水阀201,用于调节检测管3的进水量;检测管3的出液端与出液管102相连接,其中出液管102上设有第二水阀202,用于调节出水管的102的排水量。
68.示例中,检测管的下端与活塞管14相连接,活塞管14内设置可向上伸入检测管3中的清洁活塞6。
69.示例中,支撑部包括两端向靠近检测管3的侧壁的方向延伸的安装座406,安装座406的一对侧壁之间形成检测区,需要进一步指出的是,安装座406通过滑块405与连接杆404进行相互固定,安装座406的两个侧翼之间的距离为检测管3外直径的1.3
‑
1.5倍,保证两侧翼与检测管3无摩擦,且二者的距离在激光穿透的有效距离内。
70.示例中,安装座406的其中一个侧翼上安装红外点状发射器401,安装座406的其中另一个侧翼上安装红外点状接收器402,红外点状发射器401发出的红外光线,横向穿过检测筒进入红外点状接收器402。
71.工作原理:
72.把一组红外点状发射器401以及红外点状接收器402安装于采用步进电机403驱动的安装座406的一对侧翼上,每次检测sv值时,该装配辅助件的从起始位置移动到激光被遮住的状态,通过测量步进电机403的转数可以推算出激光传感器探头的移动距离,经过组态的计算给出对应的sv百分数值。
73.实施例二:
74.一种sv自动检测装置,包括进液管101和出液管102,该sv自动检测装置包括:检测管3,所述检测管3的两端开放,所述检测管3的进液端与进液管101相对接,所述检测管3的出液端与出液管102相连接;一个红外点状发射器401以及一个红外光栅接收器702,所述红外点状发射器401位于检测管3的一侧,所述红外光栅接收器702位于检测管3的另一侧,所述红外点状发射器401的发射端与红外光栅接收器702的接收端相对设置,确保单条红外线在红外光栅接收器的接收范围内,其中,所述红外点状发射器401沿检测管3的轴线上下运动,所述红外光栅接收器位于检测管3一侧的固定位置。
75.进一步,所述支撑部包括固定于步进电机403伸缩端的运动板,与检测管3侧壁相对的所述运动板的表面设有红外点状发射器401。
76.进一步,还包括固定板9,所述固定板9设置于检测管3另一侧,与检测管3侧壁相对的所述固定板9的表面设有红外光栅接收器702,所述红外光栅接收器702的信号接收感应区不小于检测管3的长度。
77.工作原理:
78.通过运动板与步进电机403的伸缩端相连接,将红外点状发射器401安装于运动板上;同时将固定板9设置于运动板相对于检测管3的对称一侧,固定板9上安装红外光栅接收器702,利用步进电机403从上到下带动运动板竖直运动,从而带动固定在运动板上的红外点状发射器401从污泥静置后的透明段下降至沉降段,可以利用步进电机403计算下降高度,每次检测sv值时,该装配辅助件的从起始位置移动到激光被遮住的状态,通过测量步进电机403的转数可以推算出激光传感器探头的移动距离,经过组态的计算给出对应的sv百分数值。
79.实施例三,如图7所示:
80.一种sv自动检测装置,包括进液管101和出液管102,该sv自动检测装置包括:检测管3,所述检测管3的两端开放,所述检测管3的进液端与进液管101相对接,所述检测管3的出液端与出液管102相连接;一个红外光栅发射器701以及一个红外光栅接收器702,一个红外光栅发射器701以及一个红外光栅接收器702分别固定于检测管3的两侧。
81.在一个实施例中,还包括第二装配辅助件,所述第二装配辅助件包括第一支撑板
801以及第二支撑板802,所述第一支撑板801和所述第二支撑板802关于检测管3对称设置,与检测管3侧壁相对的所述第一支撑板801的表面设有红外光栅发射器701,与检测管3侧壁相对的所述第二支撑板802的表面设有红外光栅接收器702。
82.工作原理:
83.箱体10内安装红外光栅发射器701和红外光栅接收器702,在红外光栅发射器701和红外光栅接收器702之间设置一根垂直于大地的透明石英管作为检测管3,透明石英管下端设置进液口,透明石英管上端设置排液口,进液口与进液泵11相连接,进液口与进液泵11之间安装有电动阀门,箱体10内设置有plc控制模块,plc控制模块分别与红外光栅传感器701/进液泵11/电动阀门12/液晶显示屏13相连接。
84.运行原理及过程:
85.初始时,进液泵11及与进液口相连接的进液管101上电动阀门以及于排液口相连接的排液管102上的电动阀门分别开启,输送污泥混合液进入石英管并从排液口排出,目的为清洗石英管并引入新鲜污泥混合液。
86.启动一段时间后,关闭进液泵11和电动阀门,石英管内储存着新鲜的污泥混合液,静置30分钟后,混合液中的污泥会逐渐沉降,上清液上浮,形成泥水分界面,红外光栅发射器701实时向石英管发射红外光线,红外光线可穿透上清液到达红外光栅接收器702,被检测为通路,红外光线不可穿透沉淀污泥层,因此不会被红外光栅接收器检测到,因此显示为闭路。通过计算光栅上被检测为闭路的传感器数量占全部传感器数量的比例即可得到sv的数值。
87.plc转换后的sv数值可显示在液晶显示屏13上,并可远传至上位机,根据数值的变化可直接或间接控制其他设备的运行。
88.实施例四:
89.根据本公开实施例的第一方面,提供一种安装根上述的sv自动检测装置的检测系统,该系统包括:
90.sv自动检测装置;
91.污水上水装置,所述污水上水装置与sv自动检测装置的进液管101相连接;
92.污水回水装置,所述污水回水装置与sv自动检测装置的出液管102相连接;
93.报警装置,所述报警装置与sv自动检测装置相连接。
94.实施例五:
95.根据本公开实施例的第一方面,提供一种适用于上所述的sv自动检测装置的检测方法,该方法包括以下步骤:
96.步骤一、获取光线接收器的检测信号;
97.步骤二、获取步进电机的旋转圈数,计算步进电机的行程或计算检测信号的接收比例
98.步骤三、判断污泥沉降比sv是否正常,若正常,则等待下次检测;若异常,则进入步骤四;
99.步骤四:调整剩余污泥泵运行频率以及污泥回流泵运行频率。
100.在一个实施例中,步骤四:调整剩余污泥泵运行频率以及污泥回流泵运行频率。
101.实施例六,如图8至图9所示:
102.根据本公开实施例的第一方面,提供一种利用根据上述的sv自动检测装置的污水处理装置,污水处理装置包括:
103.sv自动检测系统;
104.混凝池,混凝池的出液端与sv自动检测系统的污水上水装置相连接;混凝池的回液端与sv自动检测系统的污水回水装置相连接;
105.至少一个剩余污泥泵,剩余污泥泵通过管道与混凝池相连接;
106.至少一个污泥回流泵,污泥回流泵通过管道与混凝池相连接;
107.sv自动检测系统的sv自动检测装置的控制端分别与至少一个剩余污泥泵和至少一个污泥回流泵电性连接。
108.工作原理:
109.每8小时检测一次,该周期可在组态系统中整定,最设定短周期为4个小时,最长设定周期为24小时:
110.步骤s01:打开第一阀体、第二阀体以及回水泵,将混凝池内的混合液体导流至检测管内;
111.步骤s02:设定第二阀体何回水泵的工作时间为t1,t1=5min;设定第一阀体的工作时间为t1+t2,其中t2=10s,开始计时;
112.步骤s03:t1计时结束后,关闭第二阀体以及停止回水泵工作;
113.步骤s04::t2计时结束后,关闭第一阀体;
114.步骤s05:设定延时时间t3,t3=30min,开始计时;
115.步骤s06:t3计时结束后,获取激光传感器信号以及步进电机的旋转圈数;
116.步骤s07:计算sv污泥沉降比a,并对该a进行判断,如果正常,则等待下一次检测;如果异常,则进入步骤s08;
117.步骤s08包括:
118.步骤s081:
119.当a低于最低值时,停止或减少剩余污泥泵运行频率同时启动或增加污泥回流泵运行频率;
120.当a高于最高值时,启动或增加剩余污泥泵运行频率同时停止或减少污泥回流泵运行频率;
121.步骤s082:报警提示。
122.本领域技术人员在考虑说明书及实践这里公开的公开后,将容易想到本公开的其它实施方案。本申请旨在涵盖本公开的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本公开的一般性原理并包括本公开未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本公开的真正范围和精神由所附的权利要求指出。
123.应当理解的是,本公开并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本公开的范围应由所附的权利要求来限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1