一种GNSS接收机定位模式判别方法与流程
一种gnss接收机定位模式判别方法
技术领域
1.本发明涉及gnss(全球导航卫星系统)定位导航技术领域,特别是一种gnss接收机定位模式判别方法 。
背景技术:
2.gnss全球导航卫星系统(global navigation satellite system)由多个导航系统组成,是包括gps、glonass、北斗、galileo、irnss、qzss等导航系统的统称。gnss全球导航卫星系统的gps、glonass、北斗、galileo、irnss、qzss等导航子系统都是以人造卫星为参考点的无线电导航系统,具有实时连续性、全天候、全天时、全球覆盖、多功能、高精度的定位、授时、导航等功能和优势,因此在各个专业领域和大众消费市场获得广泛应用,是国家安全和国民经济不可或缺的基础设施。
3.gnss应用中,其信号基本上都是由载波、测距码和导航电文三部分组成。gnss内的基带跟踪模块分为载波跟踪环路和测距码跟踪延迟锁相环路两部分;载波跟踪环路分为锁相环(pll,phase locked loop)和锁频环(fll,frequency locked loop)两种跟踪环路,主要功能是锁定载波,输出载波多普勒观测量,同时给出载波跟踪状态参数。测距码跟踪环路主要采用延迟锁相环(dll, delay phase-locked loop),主要功能是锁定测距码相位,输出测距码位居观测量,同时给出测距码的跟踪状态参数。多普勒和伪距观测量以及环路跟踪状态用于终端接收机定位模块的定位定速。
4.无论是gps、glonass、bds还是galileo系统等,任何一个gnss系统组成都可以对地球实现全时空覆盖,任一时刻、任一地点载体的定位。但是由于技术所限,现有的gnss系统在特殊的场景,比如隧道、高架桥以及城市峡谷等环境中,环境的各种遮挡和干扰,会导致观测量状态变差,定位精度下降甚至于不能定位,这就需要在特殊场景下对定位算法进行相对应的优化。而对特殊场景的定位算法优化,要确定接收机是否在特殊场景,以及特殊场景的类型,这就需要进行场景的模式识别。基于上述,提供一种gnss接收机定位模式判别的方法显得尤为必要。
技术实现要素:
5.为了克服现有gnss系统,在隧道、高架桥以及城市峡谷等环境中,由于环境的各种遮挡和干扰,会导致观测量状态变差,定位精度下降甚至于不定位的弊端,本发明提供了在相关模块及应用单元共同作用下,在定位时存储gnss接收机位置序列,结合地图信息模块进行地图匹配,确定接收机周围的建筑/道路情况,根据周围情况和接收机观测量信息进行定位模式识别,并根据定位模式对定位模块优化处理,由此提升了接收机定位精度的一种gnss接收机定位模式判别方法 。
6.本发明解决其技术问题所采用的技术方案是:一种gnss接收机定位模式判别方法,其特征在于采用gnss接收机内捕获模块、跟踪模块、处理器、通信模块以及定位模块作为模式识别的工具,捕获模块、跟踪模块、处理
器、通信模块是安装在gnss接收机内的硬件设备且内装有应用软件单元,定位模块是安装在处理器内的应用软件;所述捕获模块应用中能实时捕获gnss系统的卫星信号;所述跟踪模块稳定跟踪gnss卫星信号,并输出多普勒、伪距观测量和跟踪环路状态信息到处理器;所述通信模块用于获取接收机附近的地图信息;所述定位模块用于地图匹配,模式识别和接收机定位,并实现导航电文解析、本地时间维护、解算接收机位置等功能;所述处理器实现协调各个模块运行,分配软硬件资源等功能;gnss接收机定位模式判别方法步骤如下,步骤a:gnss 接收机处于跟踪状态,稳定输出观测量信息和状态信息到处理器;步骤b:gnss接收机结合接收机位置序列和地图信息,进行地图匹配;步骤c:gnss接收机根据观测量信息和地图信息进行模式判别;步骤d:gnss接收机经定位模块对包含隧道,高架桥和城市峡谷模式地进行判别,进而gnss接收机得到精确定位信息。
7.进一步地,所述步骤a中,具体分为四个流程,流程一:捕获模块捕获gnss卫星信号的载波和测距码信息;流程二:跟踪模块利用捕获信息或者定位模块给出的预测信息,对卫星信号进行跟踪,输出跟踪状态、多普勒和伪距观测量信息到处理器;流程三:通信模块根据定位模块给出的位置,获取接收机周边的地图信息;流程四:定位模块利用跟踪模块和通信模块给出的信息,解算接收机位置当前速度信息。
8.进一步地,所述步骤b中,具体分为三个流程,流程一:定位模块存储gnss接收机位置序列;流程二:处理器判断是否存在接收机附近地图信息;流程三:处理器利用接收机位置序列和地图信息进行地图匹配。
9.进一步地,所述步骤b中,gnss接收机获取地图信息结合位置序列进行地图匹配,确定接收机周边的道路信息和环境,获取地图信息的方式和地图匹配的算法不限于特定方法,可以根据实际情况选用。
10.进一步地,所述步骤c中,具体分为三个流程,流程一:处理器获取跟踪模块的跟踪状态和观测量信息,获取的信息包括伪距、多普勒观测量和跟踪环路误差、协方差等状态参数;流程二:定位模块利用观测量信息和地图匹配结果进行定位模式识别;流程三:定位模块利用定位模式和观测量信息,优化定位算法和接收机位置速度解算。
11.进一步地,所述步骤c中,根据接收机观测量信息和地图信息进行模式判别时,如果没有地图信息,则仅使用接受观测量信息进行模式判别;如果存在地图信息,先使用观测量信息进行模式判别,再根据地图信息确认接收机模式。
12.进一步地,所述步骤d中, 接收机判别隧道模式时,处理器仅仅计算不可见部分卫星的平均功率,忽略与接收机运动方向接近的低于俯仰角阈值部分的卫星功率;卫星平均功率低于阈值时,判定接收机进入隧道模式;如果存在地图信息,在确定接收机所在道路之后,如果接收机周边没有隧道,则判定接收机误判,不进入隧道模式;进一步地,所述步骤d中,接收机判别城市峡谷模式时,处理器分别计算低于仰角阈值的卫星平均功率cn01和高于仰角阈值的卫星的平均功率cn02,当cn02比cn01大,且cn01与cn02的差的绝对值大于功率阈值时,判定接收机进入城市峡谷模式;如果存在地图信息,在确定接收机周边环境之后,如果接收机没有在城市峡谷附近,则判定接收机误判,不进入城市峡谷模式。
13.进一步地,所述步骤d中,接收机判别高架桥模式时,分别计算低于仰角阈值的卫星平均功率cn01和高于仰角阈值的卫星的平均功率cn02,当cn01比cn02大,且cn01与cn02的
差的绝对值大于功率阈值时,判定接收机进入高架模式;如果存在地图信息,在确定接收机周边环境之后,如果接收机没有在高架桥附近,则判定接收机误判,不进入高架桥模式。
14.本发明有益效果是:本发明在相关模块及应用单元共同作用下,在定位时存储gnss接收机位置序列,结合地图信息模块进行地图匹配,确定接收机周围的建筑/道路情况,根据周围情况和接收机观测量信息进行定位模式识别,根据定位模式对定位模块优化处理,由此提升了接收机在高架桥模式、城市峡谷模式、隧道模式等的识别准确度,进而提升了接收机定位精度。基于上述,本发明具有好的应用前景。
附图说明
15.以下结合附图和实施例将本发明做进一步说明。
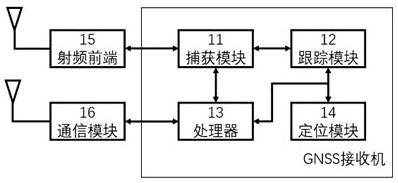
16.图1是本发明应用模块架构框图示意。
17.图2为本方法所述的隧道模式判别方法示意图。
18.图3为本方法所述的城市隧道模式判别方法示意图。
19.图4为本方法所述的高架模式判别方法示意图。
具体实施方式
20.图 1中所示,一种gnss接收机定位模式判别方法,采用gnss接收机内捕获模块、跟踪模块、处理器、通信模块以及定位模块作为模式识别的工具,捕获模块、跟踪模块、处理器、通信模块是安装在gnss接收机内的硬件设备且内装有应用软件单元,定位模块是安装在处理器内的应用软件;所述捕获模块应用中能实时捕获gnss系统的卫星信号;所述跟踪模块稳定跟踪gnss卫星信号,并输出多普勒、伪距观测量和跟踪环路状态信息到处理器;所述通信模块用于获取接收机附近的地图信息;所述定位模块用于地图匹配,模式识别和接收机定位,并实现导航电文解析、本地时间维护、解算接收机位置等功能;所述处理器实现协调各个模块运行,分配软硬件资源等功能。图1为gnss接收机和其配套的gnss射频前端部分结构框图,由三个主要部分组成,一是gnss射频前端部分,二是gnss接收机部分,处理基带信号和解算接收机位置,三是通信模块,接收地图信息。
21.图1中所示,gnss接收机定位模式判别方法步骤如下,步骤a:gnss 接收机处于跟踪状态,稳定输出观测量信息和状态信息到处理器;所述步骤a中,具体分为四个流程,流程一:捕获模块捕获gnss卫星信号的载波和测距码信息;流程二:跟踪模块利用捕获信息或者定位模块给出的预测信息,对卫星信号进行跟踪,输出跟踪状态、多普勒和伪距观测量信息到处理器;流程三:通信模根据定位模块给出的位置,获取接收机周边的地图信息;流程四:定位模块利用跟踪模块和通信模块给出的信息,解算接收机位置当前速度信息。
22.图1中所示,gnss接收机定位模式判别方法,步骤b:gnss接收机结合接收机位置序列和地图信息,进行地图匹配;所述步骤b中,具体分为三个流程,流程一:定位模块存储gnss接收机位置序列;流程二:处理器判断是否存在接收机附近地图信息;流程三:处理器利用接收机位置序列和地图信息进行地图匹配。所述步骤b中,gnss接收机获取地图信息结合位置序列进行地图匹配,确定接收机周边的道路信息和环境,获取地图信息的方式和地图匹配的算法不限于特定方法,可以根据实际情况选用。
23.图1中所示,gnss接收机定位模式判别方法,步骤c:gnss接收机根据观测量信息和
地图信息进行模式判别;所述步骤c中,具体分为三个流程,流程一:处理器获取跟踪模块的跟踪状态和观测量信息,获取的信息包括伪距、多普勒观测量和跟踪环路误差、协方差等状态参数;流程二:定位模块利用观测量信息和地图匹配结果进行定位模式识别;流程三:定位模块利用定位模式和观测量信息,优化定位算法和接收机位置速度解算。所述步骤c中,根据接收机观测量信息和地图信息进行模式判别时,如果没有地图信息,则仅使用接受观测量信息进行模式判别;如果存在地图信息,先使用观测量信息进行模式判别,再根据地图信息确认接收机模式。
24.图2所示,gnss接收机定位模式判别方法步骤d,gnss接收机经定位模块对包含隧道,高架桥和城市峡谷模式地进行判别,进而得到精确定位信息。图2所示为隧道模式判别示意图,在定位模块中进行判别,图中a点为接收机位置,方向为接收机运动方向。图中三角阴影区为接收机在隧道内依然可见卫星的区域。根据实际情况,对于接收机而言,进入隧道之后,大部分卫星都不可见,仅有部分三角阴影区的卫星可见。因此,在模式判别时,设定卫星俯仰角阈值和卫星功率阈值。在判别时,仅仅计算不可见部分卫星的平均功率,忽略与方向接近的低于俯仰角阈值部分的卫星功率。当不可见卫星的平均功率低于阈值时,处理器判定接收机进入隧道模式。如果存在地图信息,在确定接收机所在道路之后,如果接收机周边没有隧道,处理器则判定接收机误判,不进入隧道模式。
25.图3所示,gnss接收机定位模式判别方法步骤d,图3所示为城市峡谷模式判别示意图,在定位模块中进行判别,图中a点为接收机位置,图中可以看出接收机周围存在高楼,遮挡卫星信号。根据实际情况,对于接收机而言,进入城市峡谷中,周围都是高楼遮挡部分卫星信号。因此,在模式判别时,设定卫星仰角阈值和卫星功率阈值。在判别时,分别计算低于仰角阈值的卫星平均功率cn01和高于仰角阈值的卫星的平均功率cn02。当cn01比cn02小,且cn01与cn02的差的绝对值大于功率阈值时,处理器判定接收机进入城市峡谷模式。如果存在地图信息,在确定接收机周边环境之后,如果接收机没有到达高楼附近,则判定接收机误判,不进入城市峡谷模式。
26.图4所示,gnss接收机定位模式判别方法步骤d,图4所示为高架桥模式判别示意图,在定位模块中进行判别,图中a点为高架下接收机,b点为高架上接收机,图中可以看出,b点无任何遮挡,因此,不判别为任何特殊模式。a点为高架下模式,接收机上方的卫星信号会被遮挡。所以,本方法仅判断a点为高架模式。根据实际情况,对于接收机而言,进入高架下,接收机上方的卫星信号会被遮挡。因此,在模式判别时,设定卫星俯仰角阈值和卫星功率阈值。在判别时,分别计算低于仰角阈值的卫星平均功率cn01和高于仰角阈值的卫星的平均功率cn02。当cn01比cn02大,且cn01与cn02的差的绝对值大于功率阈值时,处理器判定接收机进入高架模式。如果存在地图信息,在确定接收机周边环境之后,如果接收机没有在高架附近,则判定接收机误判,不进入高架模式。
27.图1、2、3、4所示,本发明在相关模块及应用单元共同作用下,在定位时存储gnss接收机位置序列,结合地图信息模块进行地图匹配,确定接收机周围的建筑/道路情况,根据周围情况和接收机观测量信息进行定位模式识别,根据定位模式对定位模块优化处理,由此提升了接收机在高架桥模式、城市峡谷模式、隧道模式等的识别准确度,进而提升了接收机定位精度。
28.以上显示和描述了本发明的基本原理和主要特征及本发明的优点,对于本领域技
术人员而言,显然本本发明限于上述示范性实施例的细节,而且在不背离本本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。
29.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1