一种便携式林格曼黑度智能检测方法及系统与流程
1.本发明涉及柴油机械烟气检测技术领域,具体涉及一种便携式林格曼黑度智能检测方法及系统。
背景技术:
2.烟气黑度的测定一般是根据林格曼林格曼烟气黑度图测定的,目前具体的方法有人眼观测法,望远镜法,以及远程图像对比的方法。其中人眼观测法,望远镜法需要检测人员在现场进行,行政成本过高。也有远程图像对比的方法,但也需要人盯着视频,这些传统方式不但耗费了大量的人力物力,其结果有很大的人为因素。目前随着物联网技术的兴起与智慧环保的需要,需要对柴油车进行林格曼黑度检测。
3.现有技术中,在检测过程中需要人为进行标定,然后通过人工按键控制开始测量时刻,因此,如何自动判定是否有黑烟进入,自动标定并开始自动测量,成为当前便携式林格曼黑度检测亟待解决的问题。
技术实现要素:
4.为解决上述技术问题,本发明提供了一种高度自动化测量、操作简单易学且测量精度高的便携式林格曼黑度智能检测方法及系统。
5.为实现上述目的,本发明提供了一种便携式林格曼黑度智能检测方法,所述方法包括以下步骤:
6.步骤一,自动识别检测区域是否进入黑烟:人工对准排气口进行定位,采集视频和实时图像,通过边缘检测、图像卷积获取黑烟形状,对图片采用腐蚀算法、膨胀算法,并结合神经网络算法深度学习判别是否有黑烟进入,识别有黑烟进入,自动开启黑烟计算;
7.步骤二,自动识别是否满足黑度检测条件,进行数据分析和信息采集:采集视频和实时图像进行动态检测,对黑烟图像中的烟气流动形态进行分析,实时判断是否满足黑度检测条件,对于满足黑度检测条件的视频,截取实时图像进行分析,区别背景和黑烟,对满足黑度检测条件的图像进行分析,对不满足黑度检测条件的背景进行调零;
8.步骤三,背景建模,通过边缘检测、图像卷积获取黑烟形状,对黑烟图像采用腐蚀算法、膨胀算法,并结合神经网络算法深度学习判别是否有黑烟进入,对黑烟的轮廓和形状进行实时判断,判断黑烟轮廓和形状未变化,认定为后续无黑烟进入,将背景进行自动更新保存,作为下次检测的镜面背景;
9.步骤四,数据计算,停止测量之后,输出测量值。
10.进一步地,所述步骤一中,图像卷积采用拉普拉斯-二阶导数计算;
11.神经网络算法在yolov3模型库基础上针对黑烟类型进行优化,建立模型库时,把不同形状,不同颜色的黑烟都输入进行深度学习的模型。
12.进一步地,步骤三中,对截取图片进行分析,当超过10秒视频中黑烟轮廓和形态未发生变化,对黑烟的轮廓和形状进行实时判断认定无黑烟进入,认定为未排烟,将此时获取
到的图形的像素矩阵作为下次测量的镜面背景进行保存。
13.进一步地,将镜面背景和黑烟图像进行灰度化,在数据分析和信息处理时将检测到黑烟图像扣除无烟背景图像的灰度值后的灰度值,得到相应的林格曼黑度值。
14.进一步地,所述镜面背景与黑烟图像进行灰度处理,先将镜面背景灰度与黑烟图像灰度进行像素合并,进行灰度差计算,选择最大灰度值根据烟度关系式得到相应的林格曼黑度值,以提高测量精度。
15.进一步地,所述步骤二中,获取黑烟图像的黑烟轮廓后,对黑烟轮廓进行区域划分,计算各区域的林格曼黑度,取最大值作为输出的测量值。
16.进一步地,所述步骤四中,持续10秒没有黑烟触发测量,对镜面背景的数值进行完整的存储,作为下次测量的零点。
17.选用上述智能检测方法的便携式林格曼黑度智能检测系统,包括数据采集单元采集视频及图像数据、数据通信单元传输数据信、数据处理单元进行数据分析和信息处理、数据存储单元存储数据以及数据统计单元,数据通信单元将采集的数据发送至数据处理单元,数据处理单元利用边缘识别、腐蚀和生长结合神经网络算法分析图像及视频采集单元上传的数据并产生判定结果,并将检测数据及判定结果通过数据通信单元发送至数据存储单元进行存储,所述数据统计单元按照时间顺序统计各点位上传的数据记过,对全部数据进行分析,其特征在于:所述数据处理单元包括背景更新模块,所述背景更新模块将区别出来的片中的背景更新作为镜面背景。
18.进一步地,所述数据采集单元包括摄像头、与所述摄像头与数据处理单元通信连接,所述数据处理单元根据摄像头采集的视频计实时图像,选用边缘检测卷积和图片的腐蚀、膨胀算法获取烟气的形状轮廓,结合神经网络算法进行深度学习判别有无烟气进入,若有烟气进入时,所述数据采集单元根据自动进行数据采集,自动停止进行数据采集。
19.进一步地,所述系统基于arm板的嵌入式linux操作系统,采用边缘检测、图像卷积、膨胀、腐蚀算法和神经网络算法进行黑烟判断启动林格曼黑度检测。
20.本发明与现有技术相比,有益效果为:
21.第一,仅对采集的判别有黑烟的的实时视频进行黑度计算,能有效降噪,采集数据更为精准,使得数据分析和信息处理更为精准,得到的检测结果也更为精准;
22.第二,采用本发明的方法,自动开始对林格曼黑度的测量,免除了人工按键操作,简化了操作步骤,检测操作过程简单易学,便于使用和推广应用;
23.第三,林格曼黑度智能检测自动开始测量后,能自动识别是否有黑烟进入,当黑烟逐渐消散,轮廓消失,自动判别没有黑烟进入,会自动停止测量,结束测量并输出测量值,自动进行背景更新,简化了检测程序,实现高度自动化,提高了检测效率和精度。
附图说明
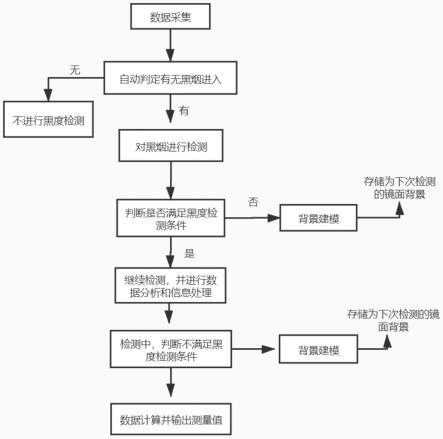
24.附图1为本发明的检测方法流程图。
具体实施方式
25.下面结合附图和实施例对本发明做进一步说明。
26.实施例1
27.如1所示,本发明的一种便携式林格曼黑度智能检测方法,所述方法包括以下步骤:
28.步骤一,自动识别检测区域是否进入黑烟:人工对准排气口进行定位,采集视频和实时图像,通过边缘检测、图像卷积获取黑烟形状,对图片采用腐蚀算法、膨胀算法,并结合神经网络算法深度学习判别是否有黑烟进入,识别有黑烟进入,自动开启黑烟计算;
29.步骤二,自动识别是否满足黑度检测条件,进行数据分析和信息采集:采集视频和实时图像进行动态检测,对黑烟图像中的烟气流动形态进行分析,实时判断是否满足黑度检测条件,对于满足黑度检测条件的视频,截取实时图像进行分析,区别背景和黑烟,对满足黑度检测条件的图像进行分析,对不满足黑度检测条件的背景进行调零;
30.步骤三,背景建模,通过边缘检测、图像卷积获取黑烟形状,对黑烟图像采用腐蚀算法、膨胀算法,并结合神经网络算法深度学习判别是否有黑烟进入,对黑烟的轮廓和形状进行实时判断,判断黑烟轮廓和形状未变化,认定为后续无黑烟进入,将背景进行自动更新保存,作为下次检测的镜面背景;
31.步骤四,数据计算,停止测量之后,输出测量值。
32.进一步地,所述步骤一中,图像卷积采用拉普拉斯-二阶导数计算;
33.神经网络算法在yolov3模型库基础上针对黑烟类型进行优化,建立模型库时,把不同形状,不同颜色的黑烟都输入进行深度学习的模型。
34.进一步地,步骤三中,对截取图片进行分析,当超过10秒视频中黑烟轮廓和形态未发生变化,对黑烟的轮廓和形状进行实时判断认定无黑烟进入,认定为未排烟,将此时获取到的图形的像素矩阵作为下次测量的镜面背景进行保存。
35.进一步地,将镜面背景和黑烟图像进行灰度化,在数据分析和信息处理时将检测到黑烟图像扣除无烟背景图像的灰度值后的灰度值,得到相应的林格曼黑度值。
36.进一步地,所述镜面背景与黑烟图像进行灰度处理,先将镜面背景灰度与黑烟图像灰度进行像素合并,进行灰度差计算,选择最大灰度值根据烟度关系式得到相应的林格曼黑度值,以提高测量精度。
37.进一步地,所述步骤二中,获取黑烟图像的黑烟轮廓后,对黑烟轮廓进行区域划分,计算各区域的林格曼黑度,取最大值作为输出的测量值。
38.进一步地,所述步骤四中,持续10秒没有黑烟触发测量,对镜面背景的数值进行完整的存储,作为下次测量的零点。
39.采用本发明的便携式林格曼黑度智能检测方法,要检测柴油机械排气口的烟气的林格曼黑度时,先启动林格曼黑度检测仪,将检测口对准排气口后,区别于现有技术中的检测仪一旦启动不论是否有黑烟进入就直接进行黑度计算,不会直接开始黑度计算,而是先判断是否有黑烟进入,当黑烟进入测量区域内,由于黑烟与纯白背景板存在强度差,在黑烟边界处有明显的差异,在图片上能够识别出黑烟的轮廓,根据轮廓再判断黑烟已经进入测量区域,自动开始进行黑度计算。本发明所采用的林格曼黑度检测方法,黑度计算针对的是有黑烟进入的实时视频,能有效降噪,采集数据更为精准,使得数据分析和信息处理更为精准,得到的检测结果也更为精准。
40.采用本发明的方法,自动开始对林格曼黑度的测量,免除了人工按键操作,简化了使用者的操作步骤,检测操作过程简单易学,便于使用和推广应用。
41.本发明中,林格曼黑度智能检测自动开始测量后,能自动识别是否有黑烟进入,当黑烟逐渐消散,轮廓消失,自动判别无黑烟进入,自动停止测量,自动更新镜面背景,结束测量并输出测量值。
42.本发明中,通过图像黑烟轮廓识别算法,判定无黑烟进入和排出,自动停止测量后,当持续10秒没有黑烟进入触发测量,认定为无黑烟进入,将背景进行自动更新保存,并将保存的背景作为下次检测的镜面背景;第一,能改变现有林格曼黑度检测每次检测都需擦拭镜片操作繁琐,且擦拭不净会影响测量结果的精确性,第二,在无需擦拭镜片直接检测时,根据镜面背景自动更新确保测量林格曼黑度的准确性,实现林格曼黑度检测仪器多次自动检测,简化了检测程序,提高了林格曼黑度检测效率和检测精度。
43.本明中的便携式林格曼黑度检测系统,用于测量柴油机械的林格曼黑度,能够测量怠速柴油机械和非道路柴油机械的冒黑烟等级。采用本发明方法的林格曼黑度检测装置,启动林格曼黑度检测仪后,对准排气口,自动启动测量、自动停止测量,自动进行背景更新,检测操作过程简单易学,自动化程度高。
44.选用上述智能检测方法的便携式林格曼黑度智能检测系统,包括数据采集单元采集视频及图像数据、数据通信单元传输数据信、数据处理单元进行数据分析和信息处理、数据存储单元存储数据以及数据统计单元,数据通信单元将采集的数据发送至数据处理单元,数据处理单元利用边缘识别、腐蚀和生长结合神经网络算法分析图像及视频采集单元上传的数据并产生判定结果,并将检测数据及判定结果通过数据通信单元发送至数据存储单元进行存储,所述数据统计单元按照时间顺序统计各点位上传的数据记过,对全部数据进行分析,其特征在于:所述数据处理单元包括背景更新模块,所述背景更新模块将区别出来的片中的背景更新作为镜面背景。
45.所述数据采集单元包括摄像头、与所述摄像头与数据处理单元通信连接,所述数据处理单元根据摄像头采集的视频计实时图像,选用边缘检测卷积和图片的腐蚀、膨胀算法获取烟气的形状轮廓,结合神经网络算法进行深度学习判别有无烟气进入,若有烟气进入时,所述数据采集单元根据自动进行数据采集,自动停止进行数据采集。
46.所述系统基于arm板的嵌入式linux操作系统,采用边缘检测、图像卷积、膨胀、腐蚀算法和神经网络算法进行黑烟判断启动林格曼黑度检测。
47.本发明中的便携式林格曼黑度智能检测系统,启动后,自动开始测量,自动识别是否有黑烟进入,黑烟逐渐消散,轮廓消失,自动判别无黑烟进入,后自动停止测量,自动更新镜面背景,结束测量并输出测量值,检测操作过程简单易学,自动化程度高。
48.最后,需要注意的是,以上列举的仅是本发明的具体实施方式。显然,本发明不限于以上实施方式,还可以有很多变形。本领域的普通技术人员能从本发明公开的内容中直接导出或联想到的所有变形,均应认为是本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1