一种检测水果农药残留的取样装置及方法与流程
1.本发明属于农残检测设备技术领域,具体涉及一种检测水果农药残留的取样装置及方法。
背景技术:
2.农药在促进农林牧业的发展方面作用显著,但同时使用农药所带来的污染环境以及农药残留对人类健康影响越来越大。残留农药直接通过植物果实或水、大气到达人、畜体内,或通过环境、食物链最终传递给人、畜。食用农药残留超标的农副产品,虽然不会导致急性中毒,但长期食用可能引起人和动物的慢性中毒,导致各种疾病的发生,诱发癌症,甚至影响到下一代。
3.现有技术中的农药残留检测一般是检测农产品的外表面而无法检测农产品内部是否有农药残留,而且是人工操作取样,当涉及较多农产品的农残检测时,需要耗费大量的人力物力取样,检测效率低下。
技术实现要素:
4.针对上述问题,本发明提出了一种检测水果农药残留的取样装置,实现了检测取样的全自动化,避免了人为干预,进而减少了检测的不准确性,提高了取样检测效率。
5.本发明主要采用以下技术方案:一种检测水果农药残留的取样装置,包括控制器以及与控制器控制连接的分拣单元、运送单元、切割单元、收集单元和脱料单元;
6.所述分拣单元包括电机,电机上设有转盘,可以驱动转盘转动;转盘周围设有挡板iv,防止水果跟随转动时从转盘上掉落。转盘上连接有输出通道用于输出水果;所述的输出通道包括挡板i、挡板ii和挡板iii,挡板i的左端与挡板iv的末端连接且与转盘相切,右端通过弧形部连接挡板ii,挡板ii的左端伸入转盘上方且与挡板iii连接,挡板iii设于转盘上;弧形部上设有感应器;
7.所述运送单元包括通过同步带连接的同步带轮i、同步带轮ii、同步带轮iii、同步带轮iv、同步带轮v;所述同步带轮i、同步带轮ii、同步带轮iii和同步带轮iv排列成矩形,所述同步带轮v设于同步带轮iii和同步带轮iv的左侧中间位置,同步带轮i由伺服电机驱动;
8.同步带上连接有若干气缸ii,每个所述气缸ii的伸缩轴下部连接有叉子;此处的同步带轮v对于气缸ii和叉子的运行起到一定的导向作用。
9.所述切割单元包括切割刀和切割垫板,所述切割垫板设于切割刀下方;所述切割刀通过气缸iii连接到支架上,所述切割刀与气缸iii铰接;所述切割刀一端通过刀转轴与支架连接,所述支架安装到滑块上,所述滑块下部设有与之配合的导轨,导轨设于固定架上;所述支架连接气缸vii,所述气缸vii另一端连接气缸支架;采用该结构可以实现支架以及切割刀可以沿着滑轨进行滑动,进而实现对水果两侧的切割。
10.所述收集单元包括位于切割垫板左侧的推料板,推料板与气缸v连接,切割垫板右
侧设有导料板,导料板末端连接收集箱;推料板可以将切割板上的水果推入导料板,进入收集箱。
11.所述脱料单元包括气缸vi,所述气缸vi通过气缸耳环连接两个连杆,每个所述连杆与一个脱料板连接;当气缸vi的伸缩杆完全伸出时,脱料板之间的间隙变大,脱料板打开;当气缸vi的伸缩杆完全缩回时,脱料板之间的间隙变小,脱料板关闭。
12.所述同步带设于水箱和切割垫板以及推料板的上方。
13.所述挡板ii和挡板ii之间的垂直距离20cm≤l≤40cm。采用该结构可以保证水果每次都以较少的数量进入水平板i和水平板ii之间,可以保证插取水果更加准确。
14.所述气缸ii的伸缩轴外部套设有夹紧筒;所述叉子包括与伸缩轴连接的叉体i以及与叉体i铰接的叉体ii,叉体i和叉体ii两侧分别设有凸起;叉体i上设有挡块;叉体i和叉体ii之间设有撑簧;当气缸ii的伸缩杆完全缩回时,叉体i和叉体ii完全收纳于夹紧筒内且凸起与夹紧筒内壁贴合,撑簧处于压缩状态。当气缸ii的伸缩杆伸出时,叉体i和叉体ii从夹紧筒内伸出,在撑簧的作用下,叉体i和叉体ii之间的撑开角度会比在夹紧筒内时的角度要大一些。所述叉体i上设有挡块,是对叉体ii起到一定的限位作用,叉体i和叉体ii之间铰接,这样可以防止叉体i和叉体ii之间的分开角度过大。
15.所述切割垫板下部连接有气缸iv,在水果进行切割时,可以对切割垫板进行升高或者降低。
16.具体使用时,其具体的步骤为:
17.(1)将水果倒入转盘上,电气驱动转盘转动,水果逐个依次进入输出通道,所述水果移动到输出通道口时,感应器感应到水果,控制器控制伺服电机带动同步带移动,运送单元跟同步带连接,所述运送单元到达水果正上方时气缸ii伸出,同时,箱体内部底端的气缸伸出,托盘托住水果,叉子插住水果;
18.(2)水果和叉子在同步带的带动下运送至切割单元上方,所述水果处于切割刀一侧时所述伺服电机停止,此时气缸vii是缩回状态,气缸iii伸出,带动切割刀切割水果一侧,所述气缸iii收回,切割刀抬起,所述伺服电机继续旋转,同步带带动水果到切割刀另一边,所述伺服电机停止,所述气缸vii伸出,所述气缸iii伸出,带动切割刀切割水果另一侧,所述气缸iii收回,切割刀抬起;
19.(3)气缸vi伸出带动推料板移动,把切割下的水果推到导料板,最后滑入收集箱内;切割完后的水果在伺服电机的带动下继续移动,到达脱料机构上方时停止,气缸vi伸出带动连杆,所述连杆带动脱料板向两边打开,所述气缸ii伸出,叉子和剩余水果伸到脱料板下方,所述气缸vi回缩带动脱料板向内夹,脱料板之间的间隙小于剩余水果的宽度,所述气缸ii缩回,剩余水果从叉子上脱落,叉子从脱料板之间的缝隙抽出,伺服电机继续移动到叉果位置,又一次循环开始。
20.进一步的,在步骤(1)中,当叉子插住水果后,所述叉子插住水果后气缸回缩一段行程,随着所述气缸ii回缩叉子向上移动,当叉子凸起接触到夹紧筒时,叉子在凸起作用下向内夹紧防止运送过程中因为震动而掉落水果。
21.综上所述,本发明实现了检测取样的全自动化,避免了人为干预,进而减少了检测的不准确性,减轻了检测人员的工作量,提高了取样检测效率,取样过程中对水果夹紧程度进行调整,避免水果掉落样本污染。
附图说明
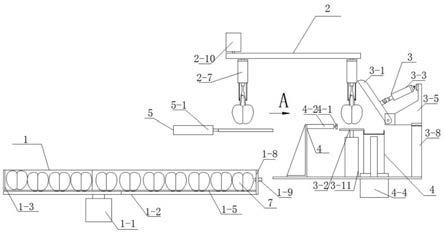
22.图1为本发明所述取样装置主视结构示意图;
23.图2为本发明所述取样装置俯视结构示意图;
24.图3为图1中a向结构示意图;
25.图4为本发明所述脱料单元的俯视结构示意图(打开状态);
26.图5为本发明所述脱料单元的俯视结构示意图(关闭状态);
27.图6为本发明所述的气缸ii与叉子以及夹紧筒的结构示意图(叉子伸出状态);
28.图7为本发明所述的气缸ii与叉子以及夹紧筒的结构示意图(叉子收纳状态);
29.图8为本发明所述切割单元主视图;
30.图9为图7的左视图;
31.图中:1分拣单元,2运送单元,3切割单元,4收集单元,5脱料单元,6控制器,7水果;
[0032]1‑
1电机,1
‑
2转盘,1
‑
3挡板iv,1
‑
4输出通道,1
‑
5挡板i,1
‑
6挡板ii,1
‑
7挡板iii,1
‑
8弧形部,1
‑
9感应器;
[0033]2‑
1同步带,2
‑
2同步带轮i,2
‑
3同步带轮ii,2
‑
4同步带轮iii,2
‑
5同步带轮iv,2
‑
6同步带轮v,2
‑
7气缸ii,2
‑
8叉子,2
‑
9夹紧筒,2
‑
10伺服电机;
[0034]2‑8‑
1叉体i,2
‑8‑
2叉体ii,2
‑8‑
3凸起,2
‑8‑
4挡块,2
‑8‑
5撑簧;
[0035]3‑
1切割刀,3
‑
2切割垫板,3
‑
3气缸iii,3
‑
4刀转轴,3
‑
5支架,3
‑
6滑块,3
‑
7导轨,3
‑
8固定架,3
‑
9气缸vii,3
‑
10气缸支架,3
‑
11气缸iv;
[0036]4‑
1推料板,4
‑
2气缸v,4
‑
3导料板,4
‑
4收集箱;
[0037]5‑
1气缸vi,5
‑
2气缸耳环,5
‑
3连杆,5
‑
4脱料板。
具体实施方式
[0038]
一种检测水果农药残留的取样装置,包括控制器6以及与控制器6控制连接的分拣单元1、运送单元2、切割单元3、收集单元4和脱料单元5;
[0039]
所述分拣单元1包括电机1
‑
1,电机1
‑
1上设有转盘1
‑
2,转盘1
‑
2周围设有挡板iv1
‑
3,转盘1
‑
2上连接有输出通道1
‑
4;所述的输出通道1
‑
4包括挡板i1
‑
5、挡板ii1
‑
6和挡板iii1
‑
7,挡板i1
‑
5的左端与挡板iv1
‑
3的末端连接且与转盘1
‑
2相切,右端通过弧形部1
‑
8连接挡板ii1
‑
6,挡板ii1
‑
6的左端伸入转盘1
‑
2上方且与挡板iii1
‑
7连接,挡板iii1
‑
7设于转盘1
‑
2上;弧形部1
‑
8上设有感应器1
‑
9;
[0040]
所述运送单元2包括通过同步带2
‑
1连接的同步带轮i2
‑
2、同步带轮ii2
‑
3、同步带轮iii2
‑
4、同步带轮iv2
‑
5、同步带轮v2
‑
6;所述同步带轮i2
‑
2、同步带轮ii2
‑
3、同步带轮iii2
‑
4和同步带轮iv2
‑
5排列成矩形,所述同步带轮v2
‑
6设于同步带轮iii2
‑
4和同步带轮iv2
‑
5的左侧中间位置,同步带轮i2
‑
2由伺服电机2
‑
10驱动;
[0041]
同步带2
‑
1上连接有若干气缸ii2
‑
7,每个所述气缸ii2
‑
7的伸缩轴下部连接有叉子2
‑
8;
[0042]
所述切割单元3包括切割刀3
‑
1和切割垫板3
‑
2,所述切割垫板3
‑
2设于切割刀3
‑
1下方;所述切割刀3
‑
1通过气缸iii3
‑
3连接到支架3
‑
5上,所述切割刀3
‑
1与气缸iii3
‑
3铰接;所述切割刀3
‑
1一端通过刀转轴3
‑
4与支架3
‑
5连接,所述支架3
‑
5安装到滑块3
‑
6上,所述滑块3
‑
6下部设有与之配合的导轨3
‑
7,导轨3
‑
7设于固定架3
‑
8上;所述支架3
‑
5连接气缸
vii3
‑
9,所述气缸vii3
‑
9另一端连接气缸支架3
‑
10;
[0043]
所述收集单元4包括位于切割垫板3
‑
2左侧的推料板4
‑
1,推料板4
‑
1与气缸v4
‑
2连接,切割垫板3
‑
2右侧设有导料板4
‑
3,导料板4
‑
3末端连接收集箱4
‑
4;
[0044]
所述脱料单元5包括气缸vi5
‑
1,所述气缸vi5
‑
1通过气缸耳环5
‑
2连接连杆5
‑
3,所述连杆5
‑
3与脱料板5
‑
4连接;
[0045]
所述同步带2
‑
1设于箱体1
‑
1和切割垫板3
‑
2以及推料板4
‑
1的上方。
[0046]
所述挡板ii1
‑
5和挡板ii1
‑
6之间的垂直距离20cm≤l≤40cm。
[0047]
所述气缸ii2
‑
7的伸缩轴外部套设有夹紧筒2
‑
9;所述叉子2
‑
8包括与伸缩轴连接的叉体i2
‑8‑
1以及与叉体i2
‑8‑
1铰接的叉体ii2
‑8‑
2,叉体i2
‑8‑
1和叉体ii2
‑8‑
2两侧分别设有凸起2
‑8‑
3;叉体i2
‑8‑
1上设有挡块2
‑8‑
4;叉体i2
‑8‑
1和叉体ii2
‑8‑
2之间设有撑簧2
‑8‑
5;当气缸ii2
‑
7的伸缩杆完全缩回时,叉体i2
‑8‑
1和叉体ii2
‑8‑
2完全收纳于夹紧筒2
‑
9内且凸起2
‑8‑
3与夹紧筒2
‑
9内壁贴合。
[0048]
所述切割垫板3
‑
2下部连接有气缸iv3
‑
11。
[0049]
一种检测水果农药残留的取样方法,采用上述所述的检测水果农药残留的取样装置,包括以下步骤:
[0050]
(1)将水果倒入转盘上,电气驱动转盘转动,水果逐个依次进入输出通道,所述水果移动到输出通道口时,感应器感应到水果,控制器控制伺服电机带动同步带移动,运送单元跟同步带连接,所述运送单元到达水果正上方时气缸ii伸出,同时,箱体内部底端的气缸伸出,托盘托住水果,叉子插住水果;
[0051]
(2)水果和叉子在同步带的带动下运送至切割单元上方,所述水果处于切割刀一侧时所述伺服电机停止,此时气缸vii是缩回状态,气缸iii伸出,带动切割刀切割水果一侧,所述气缸iii收回,切割刀抬起,所述伺服电机继续旋转,同步带带动水果到切割刀另一边,所述伺服电机停止,所述气缸vii伸出,所述气缸iii伸出,带动切割刀切割水果另一侧,所述气缸iii收回,切割刀抬起;
[0052]
(3)气缸vi伸出带动推料板移动,把切割下的水果推到导料板,最后滑入收集箱内;切割完后的水果在伺服电机的带动下继续移动,到达脱料机构上方时停止,气缸vi伸出带动连杆,所述连杆带动脱料板向两边打开,所述气缸ii伸出,叉子和剩余水果伸到脱料板下方,所述气缸vi回缩带动脱料板向内夹,脱料板之间的间隙小于剩余水果的宽度,所述气缸ii缩回,剩余水果从叉子上脱落,叉子从脱料板之间的缝隙抽出,伺服电机继续移动到叉果位置,又一次循环开始。
[0053]
在步骤(1)中,当叉子插住水果后,所述叉子插住水果后气缸回缩一段行程,随着所述气缸ii回缩叉子向上移动,当叉子凸起接触到夹紧筒时,叉子在凸起作用下向内夹紧防止运送过程中因为震动而掉落水果。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1