一种臭氧雷达收发光路对准系统的制作方法
[0001]
本实用新型属于激光雷达系统检测设备领域,具体涉及一种臭氧雷达收发光路对准系统。
背景技术:
[0002]
激光雷达可以获得大气分子、气溶胶粒子、臭氧等信息。臭氧激光雷达作为一种探测臭氧的工具,发展速度很快,但现有的臭氧激光雷达存在整体稳定性不高的问题。究其原因,是因为臭氧激光雷达采用差分吸收方法。而差分吸收激光雷达所需要的激光光源通常受到激光介质的限制,其输出的波长是有限的。为了扩展激光的输出波长,同时降低设备本身成本,市场上多采用受激拉曼管,通过拉曼效应获取需要的波长。由于拉曼管及多波长的使用,导致臭氧激光雷达收发光路相对复杂。同时,为了获取更为理想的信号,臭氧激光雷达多采用高功率激光器,高功率激光器受环境温度影响较大,往往会由于温度的细微变化导致,激光的光斑质量及角度发生变化。为了能够获得长期稳定的数据,我们往往需要定期对光路进行校准。而本实用新型可远程实现臭氧激光雷达收发光路的自动对准。
技术实现要素:
[0003]
本实用新型的目的是提供一种可实现臭氧雷达收发光路自动对准系统,通过本系统可以对激光雷达发射光路进行自动对准。
[0004]
为解决上述问题,本实用新型所采取的技术方案如下:
[0005]
一种臭氧雷达收发光路自动对准系统,包括:
[0006]
发光单元,用于发射激光;
[0007]
分光单元,用于将发光单元发射的激光进行分光;
[0008]
第一光路系统,用于对第一光路系统内的激光的方向进行调整;
[0009]
第二光路系统,用于对第二光路系统内的激光的方向进行调整;
[0010]
合束单元,用于对第一光路系统和第二光路系统的激光进行合束;
[0011]
分析控制装置,包括工控机和采集控制装置,采集控制装置用于接收第一光路系统和第二光路系统的数据,并向第一光路系统和第二光路系统发送控制信息,工控机用于对采集控制装置接收的数据进行处理,并将处理后的结果发送给采集控制装置。
[0012]
其中,所述的第一光路系统和第二光路系统内还安装有监测装置五,所述的监测装置五安装于位移装置一上,所述的合束单元还包括监测装置六,所述的监测装置六安装于位移装置二上。
[0013]
其中,所述的发光单元为激光器,所述的分光单元包括分光镜一和设置于分光镜一后方的反射镜四,分光镜一和反射镜四位于发光单元发出的激光的光路上,所述的分光镜一将发光单元发出的激光分成第一路激光和第二路激光,第一路激光进入第一光路系统,第二路激光经反射镜四进入第二光路系统,所述的分光镜一和反射镜四的后部都安装有微动电机,所述的微动电机与采集控制装置电连接。
[0014]
其中,所述的第一光路系统包括反射镜一、检测孔一、监测装置一、拉曼管一、检测孔二、监测装置二、反射镜二、反射镜三、扩束器一、反射镜八,所述的监测装置五位于反射镜三的后方,所述的监测装置六可移动至反射镜八的后方,所述的反射镜一可将激光反射至反射镜二,反射镜二可将激光反射至反射镜三,反射镜三可将激光反射至反射镜八,然后激光从反射镜八离开第一光路系统进入合束单元,且反射镜一、反射镜二、反射镜三和反射镜八相邻的两个之间交叉垂直安装,其中检测孔一、拉曼管一和检测孔二依此安装于反射镜一和反射镜二之间的光路上,监测装置一和监测装置二分别安装于检测孔一和检测孔二的后方,扩束器一安装于反射镜三与反射镜八之间的光路上,所述的反射镜一、反射镜二、反射镜三、反射镜八的后部都安装有微动电机,所述的检测孔二和检测孔一都为高温陶瓷环,所述的检测孔二和检测孔一上都安装有位移机构,所述的位移机构和微动电机与采集控制装置电连接,所述的监测装置一和监测装置二机构相同,由衰减片一和衰减片二与激光二极管、无线传输模块组成,衰减片一和衰减片二间隔安装于激光二极管的前方,激光二极管与无线传输模块数据连接,其中激光二极管、无线传输模块由外接电源供电,所述的无线传输模块与采集控制装置数据连接。
[0015]
其中,所述的第二光路系统包括反射镜五、检测孔三、监测装置三、拉曼管二、检测孔四、监测装置四、反射镜六、扩束器二、监测装置五、反射镜七,所述的监测装置五位于反射镜七的后方,所述的反射镜五可将激光反射至反射镜六,反射镜六可将激光反射至反射镜七,然后激光从反射镜七离开第二光路系统进入合束单元,且反射镜五、反射镜六、和反射镜七相邻的两个之间交叉垂直安装,其中检测孔三、拉曼管二和检测孔四依此安装于反射镜五和反射镜六之间的光路上,监测装置三和监测装置四分别安装于检测孔三和检测孔四的后方,扩束器二安装于反射镜六与反射镜七之间的光路上,所述的反射镜五、反射镜六、反射镜七的后部都安装有微动电机,所述的检测孔三和检测孔四都为高温陶瓷环,所述的检测孔三和检测孔四上都安装有位移机构,所述的位移机构和微动电机与采集控制装置电连接,所述的监测装置三和监测装置四机构相同,由衰减片一和衰减片二与激光二极管、无线传输模块组成,衰减片一和衰减片二间隔安装于激光二极管的前方,激光二极管与无线传输模块数据连接,其中激光二极管、无线传输模块由外接电源供电,所述的无线传输模块与采集控制装置数据连接。
[0016]
其中,所述的合束单元包括合束镜、反射镜九和合束转折镜,所述的监测装置六可移动至合束镜、反射镜九的后方,所述的合束镜将第一光路系统和第二光路系统的激光合束后到达反射镜九,经反射镜九反射后到达合束转折镜,然后由合束转折镜反射至天空,所述的合束镜、反射镜九的后部都安装有微动电机,所述的位移机构和微动电机与采集控制装置电连接。
[0017]
一种对准的方法,包括以下步骤:
[0018]
(1)将激光器发出的激光分成第一路激光和第二路激光;
[0019]
(2)将第二路激光进行阻断,对第一路激光经四次反射后进行合束,其中第一路激光在第一次反射前后的能量值之差小于15%,在第二次、第三次和第四次反射的过程中,每次反射前后激光的能量值之差通过逐步优化法优化至最大;
[0020]
(3)将第一路激光进行阻断,对第二路激光经四次反射后进行合束,其中第二路激光在第一次反射前后的能量值之差小于15%,在第二次、第三次和第四次反射的过程中,每
次反射前后激光的能量值之差通过逐步优化法优化至最大;
[0021]
(4)将第一路激光和第二路激光进行合束,将合束后的激光经一次反射后,经合束转折镜反射至天空。
[0022]
其中,所述的逐步优化法为:通过后一次反射时的透射的后向散射能量的最大值,确定前一次反射时的激光的反射角度。
[0023]
本实用新型通过对散色光的收集测量,使传统探测单元得到应用,常规探测单元在强光状态下容易饱和造成不可逆损伤;能量监测装置通过使用不同透过率衰减片组合使光强控制在可接受范围,然后通过大量数据测量得出测量值与实际值之间能量对应关系式,从而使能量监测得以实现。通过位移机构与能量监测装置结合,实现了单探测单元对多点能量的监测。检测孔采用陶瓷环,实现了高能量的位置测量。通过微动电机调节,对激光进行水平和垂直两个维度的调节,然后通过监测装置,判断微动电机的调节位置。通过微动电机调节使激光调整至理想状态,通过逐级调节与监测,从而实现整体激光光路的调节。
[0024]
本实用新型与现有技术相比较,本实用新型的有益效果在于:其一,发射光路整体处于监测状态可实现激光雷达整体状态的实时反馈,从而提前预防故障的发生;其二,选择对透过光进行监测;其三,位移机构的应用,使单个能量监测装置实现了对多点位能量的检测,大大降低了整体的成本。其四,衰减片及光电二极管的联合应用,使能量监测实现了低成本高精度,快响应的效果;其五,整体收发光路逐级优化,可将光路优化至最佳状态,相较常规人工调节优势明显,达到人工无法达到的程度。
附图说明
[0025]
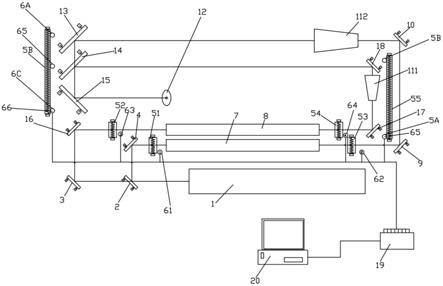
图1为本实用新型的整体系统示意图;
[0026]
图2为本实用新型的能量监测装置的结构示意图;
[0027]
图3为本实用新型的检测孔的主视图。
具体实施方式
[0028]
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
[0029]
在本实用新型的描述中,需要说明的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
[0030]
在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
[0031]
本实用新型中使用的检测装置一、检测装置二、检测装置三、检测装置四、检测装
置五、检测装置六均为同一种检测装置,且该检测装置采用衰减片一661和衰减片二662与激光二极管663、无线传输模块664组成,衰减片一661和衰减片二662间隔安装于激光二极管663的前方,激光二极管663与无线传输模块664数据连接,其中激光二极管663、无线传输模块664由外接电源供电。检测孔一、检测孔二、检测孔三和检测孔四结构相同,均采用高温陶瓷环601,高温陶瓷环601的厚度大于高温陶瓷环的内径,高温陶瓷环601可安装于位移机构602上,如电动伸缩杆,可对高温陶瓷环601的位置进行调整,可实现对穿过高温陶瓷环601的激光进行阻断。
[0032]
本实用新型的分光镜一、反射镜一、反射镜二、反射镜三、反射镜四、反射镜五、反射镜六、反射镜七、反射镜八、反射镜九、合束镜的后部都安装有微动电机,微动电机可对以上的镜片分别进行水平和垂直两个维度的调节;且微动电机都与采集控制装置19电连接;监测装置五安装于位移装置一上,监测装置六安装于位移装置二上,位移装置一和位移装置二都为银光ix-05系内嵌式电动滑台,内嵌式电动滑台与采集控制装置19电连接。
[0033]
参照附图1,激光器1发射一定能量强度w1的激光,激光首先通过分光镜一2,然后发射光经反射与透射分成第一路激光和第二路激光,第一路激光和第二路激光的能量分别为w2和w3,第一路激光到达反射镜一4,第二路激光到达反射镜四3。
[0034]
(1)调节第一路激光
[0035]
通过对检测孔三52进行调节,可将第二路光源完全阻挡;通过对检测孔一51的进行调节,使第一路激光穿过检测孔一51。
[0036]
第一路激光首先经反射镜一4反射,然后通过检测孔一51,然后检测孔一51处的监测装置一61测量第一路激光在监测装置一61处的测向散射能量,然后通过采集控制装置19将获得的散色能量值发送给工控机20进行分析,通过能量公式计算出测量值w2a,根据w2a与w2的差值,通过控制装置19控制微动电机对分光镜一2进行多次调整,同时记录能量曲线,获取到能量波峰曲线,然后根据能量波峰的位置,将w2a调整在w2的85%以上,然后对反射镜一4进行调节,调节直至w2a与w2的差值在5%以内。
[0037]
然后第一路激光通过拉曼管一7再经过检测孔二53,然后检测孔二53处的监测装置二62测量第一路激光在透射拉曼管后的散射能量,然后通过采集控制装置19将获得的能量值w2b与w2对比,然后通过控制装置19控制微动电机对反射镜一4进行调整,采集控制装置19同步记录能量曲线,然后获取峰值点,将反射镜一4调整至峰值点对应的位置;然后第一路激光到达反射镜二9,将监测装置五65调节至反射镜三10后方,进行透射的后向散射能量测量,同时通过控制装置19控制微动电机对反射镜二9进行交替往复调整,通过采集控制装置19将获得的能量值发送给工控机20进行分析绘图,然后获取峰值点,将反射镜二9调整至峰值点对应的位置;然后第一路激光依次经过反射镜三10、扩束器一112,此时将监测装置六66调节至反射镜八13后方的6a处,对反射镜八13处的透射的后向散射能量进行测量,通过控制装置19控制微动电机对反射镜三10进行交替往复调整,然后通过采集控制装置19将获得的将获得的能量值发送给工控机20进行分析绘图,然后获取峰值点,将反射镜三10调整至峰值点对应的位置;然后第一路激光分别通过反射镜八13、合束镜14,然后分别将监测装置六66移动至合束镜14后方的6b处、反射镜九15后方的6c处,依次通过控制装置19控制微动电机对反射镜八13、合束镜14进行调整,然后通过采集控制装置19将获得的能量值分析绘图,然后获取峰值点,将反射镜二9和合束镜14分别调整至峰值点对应的位置。
[0038]
(2)调节第二路激光
[0039]
然后通过对检测孔一51进行调节,可将第一路光源完全阻挡;通过对检测孔三52的调节,使第二路激光穿过检测孔三52,然后通过监测装置三63测量检测孔三52处的侧向散射能量,然后通过采集控制装置19将获得的散色能量值发送给工控机20进行分析绘图,通过能量公式计算出测量值w3a,根据w3a与w3的差值,通过控制装置19控制微动电机对反射镜四3进行多次调整,同时记录能量曲线,获取到能量波峰曲线,然后根据能量波峰的位置,将w3a调整在w3的85%以上,然后通过控制装置19控制微动电机对反射镜五16进行调节,调节直至w3a与w3的差值在5%以内。
[0040]
然后第二路激光通过拉曼管二8再经过检测孔四54,然后检测孔四54处的监测装置四64测量第二路激光的后向散射能量,同时通过控制装置19控制微动电机对反射镜五16进行往复调整,并通过采集控制装置19将获得的能量值发送给工控机20进行分析绘图,然后获取峰值点,将反射镜五16调整至峰值点对应的位置;然后第二路激光依次经过反射镜六17、扩束器二111,此时将监测装置五65调节至反射镜七18后方的5b处,通过控制装置19控制微动电机对反射镜六17进行多次往复调整,对透射激光的后向散射能量进行测量,然后通过采集控制装置19将获得的能量值发送给工控机20进行分析绘图,然后获取峰值点,将反射镜六17调整至峰值点对应的位置;然后第二路激光经过反射镜七18,然后将监测装置六66调节合束镜14后方的6b处,通过控制装置19控制微动电机对反射镜七18进行往复交替调整,对透射激光的侧向散射进行监测,然后通过采集控制装置19将获得的能量值绘图分析,然后获取峰值点,将反射镜七18调整至峰值点对应的位置;然后第二路激光经过过合束镜14,同样将监测装置六66移动至反射镜九15后方的6c处,通过控制装置19控制微动电机对合束镜14进行调整,对透射激光的侧向散射进行监测,然后通过采集控制装置19将获得的能量值发送给工控机20进行分析绘图,然后获取峰值点,将合束镜14调整至峰值点对应的位置。
[0041]
(3)合束
[0042]
按照上述方式,两路光源优化至合束镜14,然后达到反射镜九15,通过控制装置19控制微动电机反射镜九15进行调整,然后经合束转折镜12反射至天空。
[0043]
上述根据出射能量w1产生的能量w2和w3进行优化后,通过将检测孔三52进行调节阻挡第二路激光,同时将检测孔一51恢复至初始中间位置;然后同步经过监测装置一61、监测装置二62、监测装置五65、监测装置六66进行能量监测。然后阻挡第一路激光进行第二路激光的优化。待两步优化完成,此时通过臭氧雷达采集软件返回的信号状态对反射镜九15进行最终优化调节,此处最终优化是结合接收信号进行判断,默认按照三公里处信噪比为判断依据,根据不同雷达系统可进行调整。
[0044]
尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1