移动机器人的制作方法
1.本实用新型涉及测距传感器技术领域,尤其涉及一种移动机器人。
背景技术:
2.三角测距法是一种很常见的测距方法,在工业、电子、机器人等应用场景已得到大量应用。其中,如图1所示,基于线光源与面阵传感器的测距方案中主要包括用于产生线光源或面阵光源的光源和接收反射光信号传感器,传感器可以测量线光源所在平面内目标的深度信息。
3.但是,现有的线光源方案,其光源的发射角度以及传感器的视场角度都比较有限,在移动机器人等应用场景中,会存在较大的测量盲区。如图2所示,图中灰色区域为移动机器人的可探测范围,视角两侧的部分为盲区,移动机器人探测不到该区域内的目标。
4.基于此,如何提升移动机器人的探测能力成为了亟待解决的问题。
技术实现要素:
5.本实用新型的主要目的在于提供一种移动机器人,旨在提高移动机器人的探测能力,以提升其避障性能。
6.为实现上述目的,本实用新型提出一种移动机器人,所述移动机器人包括:
7.机器人主体;
8.光源,安装于所述机器人主体的前端上;
9.反射镜,安装于所述光源的出光侧并用于将所述光源射出的发射光线形成预设角度的环视线激光线并反射至目标物;
10.传感器,设置于所述机器人主体上;以及
11.成像镜,所述成像镜设于所述传感器的入光侧并用于将所述环视线激光线经目标物反射的反射光线反射并投影至所述传感器;
12.所述传感器,用于接收所述成像镜投影的反射光线,以测得目标物的距离。
13.在一实施例中,所述反射镜呈锥形或曲面形设置。
14.在一实施例中,所述成像镜呈曲面形设置。
15.在一实施例中,所述预设角度为360度;所述光源为边缘发射激光器。
16.在一实施例中,所述光源的波长为400至1100nm。
17.在一实施例中,所述传感器的功率为0.1mw至10w。
18.在一实施例中,所述传感器的分辨率为100像素至1000万像素。
19.在一实施例中,所述传感器为ccd面阵传感器或cmos面阵传感器。
20.在一实施例中,所述传感器包括本体及设于本体一侧的镜头,所述镜头用于获取图像信号;
21.所述镜头的视场角为30度至120度。
22.在一实施例中,所述传感器还包括设于所述本体与所述镜头之间的滤光片,所述
滤光片用于过滤干扰光信号。
23.本实用新型通过将该移动机器人的光源安装于机器人主体的前端上,反射镜安装于光源的出光侧并用于将光源射出的发射光线形成预设角度的环视线激光线并反射至目标物,传感器设置于机器人主体上,成像镜设于传感器的入光侧并用于将环视线激光线经目标物反射的反射光线反射并投影至传感器,传感器用于接收成像镜投影的反射光线,以测得目标物的距离,提高了移动机器人的探测能力,进而提升了避障性能。
附图说明
24.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
25.图1为一示例性技术中测距传感器的测距原理图;
26.图2为一示例性技术中移动机器人的探测示意图(俯视图);
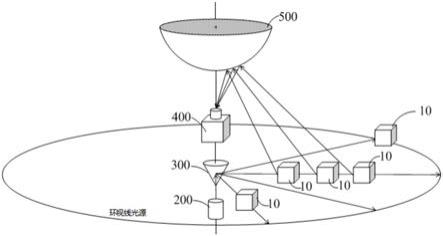
27.图3为本实用新型移动机器人一实施例的测距原理图;
28.图4为本实用新型移动机器人一实施例中测距传感器水平安装时的结构示意图;
29.图5为本实用新型移动机器人另一实施例中测距传感器倾斜安装时的结构示意图。
30.附图标号说明:
31.标号名称标号名称100机器人主体400传感器200光源500成像镜300反射镜10目标物
32.本实用新型目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
33.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
34.需要说明,若本实用新型实施例中有涉及方向性指示(诸如上、下、左、右、前、后
……
),则该方向性指示仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
35.另外,若本实用新型实施例中有涉及“第一”、“第二”等的描述,则该“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,若全文中出现的“和/或”的含义为,包括三个并列的方案,以“a和/或b”为例,包括a方案,或b方案,或a和b同时满足的方案。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互
矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本实用新型要求的保护范围之内。
36.三角测距法是一种很常见的测距方法,在工业、电子、机器人等应用场景已得到大量应用。其中,如图1所示,图1为一示例性技术中测距传感器的测距原理图,基于线光源与面阵传感器的测距方案中主要包括用于产生线光源或面阵光源的光源和接收反射光信号传感器,传感器可以测量线光源所在平面内目标的深度信息。
37.在一应用上述测距原理的方案中,如图2所示,图2为一示例性技术中移动机器人的探测示意图(俯视图),图中灰色区域为移动机器人的可探测范围,移动机器人测距传感器的光源的发射角度以及传感器的视场角度都比较有限,视角两侧的部分存在较大的测量盲区,移动机器人探测不到该区域内的目标。
38.为了提高移动机器人的探测能力,以提升其避障性能,本实用新型提出一种移动机器人,尤其是扫地机器人,此处不限。
39.参照图3至图5,在本实用新型一实施例中,该移动机器人包括机器人主体100、光源200、反射镜300、传感器400及成像镜500;光源200安装于机器人主体100的前端上;反射镜300安装于光源200的出光侧并用于将光源200射出的发射光线形成预设角度的环视线激光线并反射至目标物10;传感器400设置于机器人主体100上;成像镜500设于传感器400的入光侧并用于将环视线激光线经目标物10反射的反射光线反射并投影至传感器400;传感器400用于接收成像镜500投影的反射光线,以测得目标物10的距离。
40.需要说明的是,机器人主体100可为圆盘状设置;光源200、反射镜300、传感器400及成像镜500可为组装成一个整体的测距组件或测距传感器,也可是单个的部件依次安装于机器人主体100上,测距组件的安装倾斜角度不同,其探测范围不同,可通过调整安装角度,来实现近距离目标物10的探测,以缩小移动机器人的测量盲区。在一些实施例中,还可通过设置控制系统及驱动机构来驱动测距组件的倾斜角,从而实现移动机器人的探测范围可调节的功能。
41.在生产组装时,可依次将光源200、反射镜300、传感器400及成像镜500通过粘接、卡接或螺纹连接等方式安装于机器人主体100前端的安装位上;也可先将光源200、反射镜300、传感器400及成像镜500组装为一个整体的测距组件,再将该测距组件安装于机器人主体100的前端上,此处不限。
42.在本实施例中,反射镜300可呈锥形或曲面形设置,以将光源200射出的发射光线形成预设角度的环视线激光线,预设角度最高可达360度;成像镜500也可呈曲面形设置,以将各角度传输过来的发射光线反射并投影至传感器400,以全方位的对移动机器人周边的障碍物进行检测,减少了检测盲区,提升了避障性能,同时也减少了测距传感器400的数量,降低了生产制造的成本。
43.在本实施例中,成像镜500可为用于折反光线的曲面镜,其曲面形式可选择平面、抛物面、椭圆面或双曲面等,设置曲面的作用在于将空间内三维的点投影到传感器400像素所在的二维平面上,曲面形式不同,传感器400拍到的图像会有不同的畸变。因此,实际使用时,需要通过软件对畸变的图像再做校正。曲面的参数与曲面类型有关,如下是双曲面的曲面方程(旋转双叶双曲面)
[0044][0045]
其中,a是双曲线虚轴长度的一半,b是双曲线实轴长度的一半。虚轴长度没有实际的物理意义,实轴长度是双曲面顶点到原点的距离。公式中的a和b可以根据实际视场角需求做调整,如想获得较大的纵向视场角范围,可以调整a和b,增大双曲面的曲率,不同的a和b的值,对应不同的曲面形状,进而有不同的光线偏折角度,影响成像的畸变情况以及视场大小。此外,双曲面的焦点到传感器400投影中心的距离d也需要根据实际需求再做调整,通常距离d为双曲面焦距的2倍。
[0046]
可以理解的是,在本实用新型的技术方案中,由于该移动机器人的光源200安装于机器人主体100的前端上,反射镜300安装于光源200的出光侧并用于将光源200射出的发射光线形成预设角度的环视线激光线并反射至目标物10,传感器400设置于机器人主体100上,成像镜500设于传感器400的入光侧并用于将环视线激光线经目标物10反射的反射光线反射并投影至传感器400,传感器400用于接收成像镜500投影的反射光线,以测得目标物10的距离,提高了移动机器人的探测能力,进而提升了避障性能。
[0047]
主要参考图3,为了减少检测盲区,确定目标物10的深度信息,在一实施例中,光源200可采用边缘发射激光器等,光源200的波长可设置为400至1100nm,此处不限。传感器400可选用ccd面阵传感器400或cmos面阵传感器400等,其功率优选为0.1毫瓦(mw)至10瓦(w),分辨率优选为100像素至1000万像素,当然,在一些其他实施例中,也可根据需求选择其他参数的传感器400,此处不做限定。
[0048]
值得一提的是,根据激光投影方向,半导体激光器可以分为两类型:边缘发射激光器(eel,edge emitting laser)和垂直腔面发射激光器(vcsel,vertical cavity surface emitting laser)。目前,主要有连续(cw)和脉冲(pulse)两种形式的边射型激光二极管在测距传感中得以广泛的应用,其中,基于三角测距原理的光源器件,通常采用连续(cw)调制的激光管,其瞬时功率比较小(从几毫瓦到几瓦);而基于时间飞行原理的光源器件,通常采用脉冲(pulse)调制的激光管,其瞬时功率相对较大(可达几十瓦),但占空比小,所以平均功率也仅在几毫瓦到几瓦之间。
[0049]
电荷耦合器件图像传感器ccd(charge coupled device),它使用一种高感光度的半导体材料制成,能把光线转变成电荷,通过模数转换器芯片转换成数字信号,数字信号经过压缩以后由相机内部的闪速存储器或内置硬盘卡保存,因而可以轻而易举地把数据传输给计算机,并借助于计算机的处理手段,根据需要和想像来修改图像。
[0050]
cmos(complementary metal
‑
oxide
‑
semiconductor),中文学名为互补金属氧化物半导体,它本是计算机系统内一种重要的芯片,保存了系统引导最基本的资料。cmos的制造技术和一般计算机芯片没什么差别,主要是利用硅和锗这两种元素所做成的半导体,使其在cmos上共存着带n(带
‑
电)和p(带+电)级的半导体,这两个互补效应所产生的电流即可被处理芯片记录和解读成影像。后来发现cmos经过加工也可以作为数码摄影中的图像传感器,cmos传感器也可细分为被动式像素传感器(passive pixel sensor cmos)与主动式像素传感器(active pixel sensor cmos)。
[0051]
在一实施例中,为了过滤干扰信号,以提升移动机器人的检测精度,该移动机器人的传感器400可包括本体及设于本体一侧的镜头,镜头用于获取图像信号;镜头的视场角可
为30度至120度。在本实施例中,传感器400还可包括设于本体与镜头之间的滤光片,滤光片用于过滤干扰光信号。如此,在获得较大的检测范围的同时,也过滤了干扰信号,提升了移动机器人的检测精度。
[0052]
以上所述仅为本实用新型的可选实施例,并非因此限制本实用新型的专利范围,凡是在本实用新型的发明构思下,利用本实用新型说明书及附图内容所作的等效结构变换,或直接/间接运用在其他相关的技术领域均包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1