基于双霍尔传感器的运动方向判断装置的制作方法
1.本实用新型涉及物体运动方向判断领域,具体是基于双霍尔传感器的运动方向判断装置。
背景技术:
2.物体运动方向判断是目前应用较为普通的一种需求。尤其在目前物联网和 5g的背景之下,单个物体的行为的感知被认定为一种趋势。
3.目前物体的运动判断所采用的方式一般采用多光电开关判断或者多霍尔芯片配合多磁块判断完成。多光电开关判断:在运动物体的两侧上设置有光电开关,物体本身设置通光孔,物体运动后光电开关的光束通过通光孔实现接通与关闭的控制,多个光电开关的作用下,在不同方向运动所产生的信号不同就能判断物体运动的方向。对于霍尔配合多磁块判断方案:在运动的物体上装有多个磁铁,在物体的两侧装有霍尔传感器,当物体运动时带动物体上的磁铁运动,当磁铁运动感应区域时,霍尔芯片产生信号输出,通过计算可计算出方向。
4.采用光电开关方式本身成本较低也易于安装,但是缺点是系统不具有防尘的效果。一旦光路中有遮挡比如灰尘的堆积,就会给整个系统带来失效的风险。
5.采用两侧是霍尔芯片中间是磁铁随物体运动的方式。虽然具有防尘的效果,但是此种方案需要在运动物体上需要根据物体的大小和运动特性布置若干个磁铁。磁铁的加入会带来成本的增加和自重的增大,当物体较大行程较大时,随着磁铁的增加,其系统成本也会增加。
技术实现要素:
6.本实用新型的目的在于提供基于双霍尔传感器的运动方向判断装置及方法,它能在保证检测物体运动方向的前提下,能够达到防尘、减轻装置自重、尽量降低成本的目的。其不但可以运用在直线运动也可用在圆周应用的场景,比如汽车安全带收放轴的运动方向的测量,汽车轮胎转动的方向的测量。特别是改进了现有汽车安全带收放轴的运动方向测量装置及方法。
7.本实用新型为实现上述目的,通过以下技术方案实现:
8.基于双霍尔传感器的运动方向判断装置,包括两个霍尔传感器、两个磁体、隔磁钢片;每个磁体各对应一个霍尔传感器;所述隔磁钢片上设有镂空孔,所述隔磁钢片在磁体的n极、s极之间移动;所述镂空孔的设置位置与霍尔传感器、磁体的位置相适应。
9.两个所述磁体放置方式的磁感线方向相同。
10.两个所述磁体放置方式的磁感线方向相反。
11.两个所述磁体之间设有隔磁材料。
12.基于双霍尔传感器的运动方向判断装置的方法,包括以下步骤:
13.s1,隔磁钢片移动,隔磁钢片其中一个镂空孔前侧首先对齐第一个霍尔传感器和
磁体组,使此组的磁体的磁感线穿过镂空孔形成的磁场作用于霍尔传感器,霍尔传感器输出脉冲数值;第二个霍尔传感器和磁体组仍被相邻两个镂空孔之间的隔磁钢片阻挡,霍尔传感器不受磁场影响,霍尔传感器为零值;
14.s2,隔磁钢片进一步移动,镂空孔前侧对齐第二个霍尔传感器和磁体组,使此组的磁体的磁感线也穿过镂空孔形成的磁场作用于霍尔传感器,霍尔传感器输出脉冲数值;
15.s3,通过观测两个霍尔传感器输出脉冲数值的先后顺序来判断隔磁钢片运动方向。
16.方法实施一:两个磁体放置方式的磁感线方向相反,隔磁钢片其中一个镂空孔前侧依次对齐两个霍尔传感器和磁体组时,其中一个霍尔传感器和磁体组的霍尔传感器输出脉冲数值为正值,另一个霍尔传感器和磁体组的霍尔传感器输出脉冲数值为负值;通过观察两个脉冲数值为“正负”或“负正”顺序来判断隔磁钢片运动方向。
17.方法实施二:
18.两个磁体放置方式的磁感线方向相同,隔磁钢片其中一个镂空孔前侧依次对齐两个霍尔传感器和磁体组时,其中一个霍尔传感器和磁体组的霍尔传感器输出脉冲数值为非零值,另一个霍尔传感器和磁体组的霍尔传感器输出脉冲数值也为为非零值;通过观察两个脉冲非零值的先后顺序来判断隔磁钢片运动方向。
19.对比现有技术,本实用新型的有益效果在于:
20.本装置通过两个霍尔传感器、两个磁体以及一个运动的带有镂空孔的隔磁钢片进行运动方向检测,相比于多光电开关的检测装置不仅减低成本而且够达到防尘的效果;相比于两侧是霍尔芯片中间是磁铁随物体运动的方式,大大减少了磁铁的加入会带来成本的增加和自重的增大的不足,大大减轻了装置的自重、降低了整个检测系统的成本。
21.本运动方向判断装置不但可以运用在直线运动也可用在圆周应用的场景,比如汽车安全带收放轴的运动方向的测量,汽车轮胎转动的方向的测量。特别是改进了现有汽车安全带收放轴的运动方向测量装置及方法。
附图说明
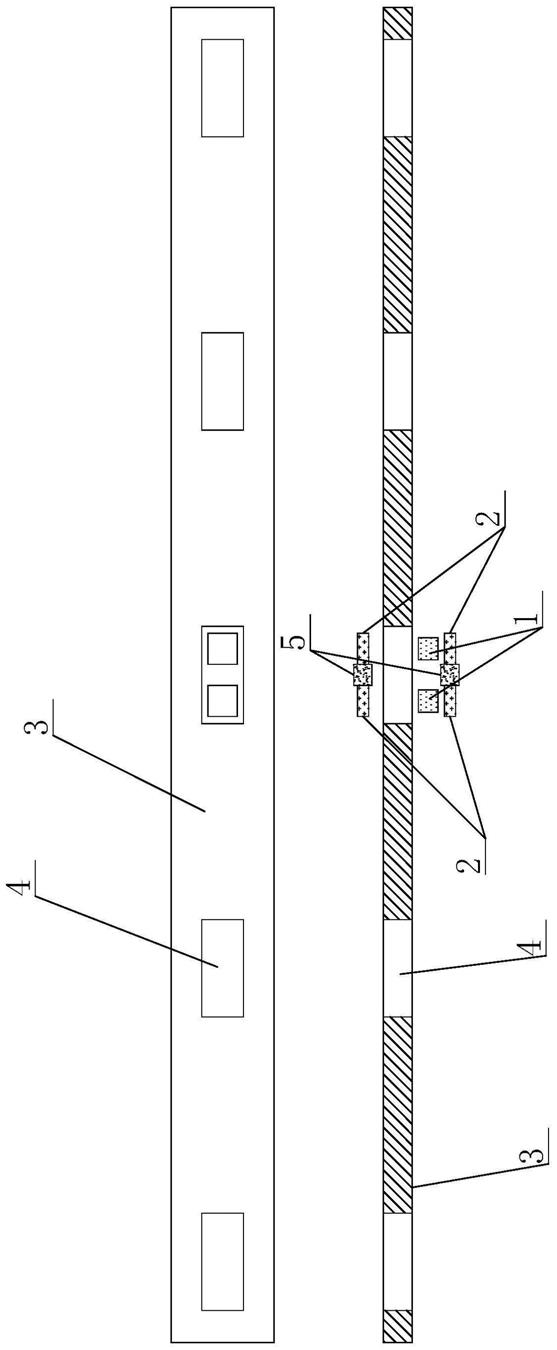
22.附图1是本实用新型用于直线运动方向测量时结构示意图。
23.附图2是本实用新型中上方两个磁体靠近隔磁钢片一侧为n极、下方两个磁体靠近隔磁钢片一侧为s极时,本装置用于直线运动方向测量时结构示意图。
24.附图3是本实用新型中上方两个磁体靠近隔磁钢片一侧为s极、下方两个磁体靠近隔磁钢片一侧为n极时,本装置用于直线运动方向测量时结构示意图。
25.附图4是本实用新型中上方两个磁体靠近隔磁钢片一侧左右方向分别为n 极和s极、下方两个磁体靠近隔磁钢片一侧左右方向分别为s极和n极时,本装置用于直线运动方向测量时结构示意图。
26.附图5是本实用新型用于圆周运动方向测量时结构示意图。
27.附图6是本实用新型中上方两个磁体靠近隔磁钢片一侧为n极、下方两个磁体靠近隔磁钢片一侧为s极时,本装置用于圆周运动方向测量时结构示意图。
28.附图7是本实用新型中上方两个磁体靠近隔磁钢片一侧为s极、下方两个磁体靠近隔磁钢片一侧为n极时,本装置用于圆周运动方向测量时结构示意图。
29.附图8是本实用新型中上方两个磁体靠近隔磁钢片一侧左右方向分别为n 极和s极、下方两个磁体靠近隔磁钢片一侧左右方向分别为s极和n极时,本装置用于圆周运动方向测量时结构示意图。
30.附图中所示标号:
31.1、霍尔传感器;2、磁体;3、隔磁钢片;4、镂空孔;5、隔磁材料。
具体实施方式
32.下面结合具体实施例,进一步阐述本实用新型。应理解,这些实施例仅用于说明本实用新型而不用于限制本实用新型的范围。此外应理解,在阅读了本实用新型讲授的内容之后,本领域技术人员可以对本实用新型作各种改动或修改,这些等价形式同样落于本申请所限定的范围。
33.实施例1:
34.本实用新型所述是基于双霍尔传感器的运动方向判断装置,主体结构包括两个霍尔传感器1、两个磁体2、隔磁钢片3;每个磁体2各对应一个霍尔传感器1;所述隔磁钢片3上设有镂空孔4,所述隔磁钢片3在磁体2的n极、s极之间移动;所述镂空孔4的设置位置与霍尔传感器1、磁体2的位置相适应。
35.两个所述磁体2放置方式的磁感线方向相反。两个所述磁体2之间设有隔磁材料5。
36.方法实施一:
37.如说明书附图图4和图8所示,上方两个磁体2靠近隔磁钢片3一侧左右方向分别为n极和s极、下方两个磁体2靠近隔磁钢片3一侧左右方向分别为s极和n极时。
38.基于双霍尔传感器的运动方向判断装置的方法,包括以下步骤:
39.s1,隔磁钢片3移动,隔磁钢片3其中一个镂空孔4前侧首先对齐第一个霍尔传感器1和磁体2组,使此组的磁体2的磁感线穿过镂空孔4形成的磁场作用于霍尔传感器1,霍尔传感器1输出脉冲数值;第二个霍尔传感器1和磁体2组仍被相邻两个镂空孔4之间的隔磁钢片3阻挡,霍尔传感器1不受磁场影响,霍尔传感器 1为零值;
40.s2,隔磁钢片3进一步移动,镂空孔4前侧对齐第二个霍尔传感器1和磁体2 组,使此组的磁体2的磁感线也穿过镂空孔4形成的磁场作用于霍尔传感器1,霍尔传感器1输出脉冲数值;
41.s3,通过观察两个脉冲数值为“正负”或“负正”顺序来判断隔磁钢片3运动方向。
42.结合附图详解,即:
43.若隔磁钢片3沿着说明书附图图4和图8中a箭头所示运动方向运动时,镂空孔4前侧首先对齐左侧霍尔传感器1和磁体2组,使此组的磁体2的磁感线(磁感线方向:从上往下方向)穿过镂空孔4形成的磁场作用于霍尔传感器1,霍尔传感器 1输出脉冲数值“+1”;第二个霍尔传感器1和磁体2组仍被相邻两个镂空孔4之间的隔磁钢片3阻挡,霍尔传感器1不受磁场影响,霍尔传感器1为零值;
44.隔磁钢片3进一步移动,镂空孔4前侧对齐右侧霍尔传感器1和磁体2组,使此组的磁体2的磁感线(磁感线方向:从下往上方向)也穿过镂空孔4形成的磁场作用于霍尔传感器1,霍尔传感器1输出脉冲数值
“‑
1”;
45.因此两个脉冲值顺序为:“+1”、
“‑
1”。
46.同理,若隔磁钢片3沿着说明书附图图4和图8中b箭头所示运动方向运动时,镂空孔4前侧首先对齐右侧霍尔传感器1和磁体2组,使此组的磁体2的磁感线(磁感线方向:从下往上方向)穿过镂空孔4形成的磁场作用于霍尔传感器1,霍尔传感器1输出脉冲数值
“‑
1”;第二个霍尔传感器1和磁体2组仍被相邻两个镂空孔4 之间的隔磁钢片3阻挡,霍尔传感器1不受磁场影响,霍尔传感器1为零值;
47.隔磁钢片3进一步移动,镂空孔4前侧对齐左侧霍尔传感器1和磁体2组,使此组的磁体2的磁感线(磁感线方向:从上往下方向)也穿过镂空孔4形成的磁场作用于霍尔传感器1,霍尔传感器1输出脉冲数值“+1”;
48.因此两个脉冲值顺序为:
“‑
1”、“+1”。
49.两种运动方向输出的脉冲值不同,a箭头所示运动方向时为:“+1”、
“‑
1”, b箭头所示运动方向为
“‑
1”、“+1”,因此,通过观察两个脉冲数值为“正负”或“负正”顺序来判断隔磁钢片3运动方向。
50.实施例2:
51.与实施例1不同的是,本实施例2中两个所述磁体2放置方式的磁感线方向相同。
52.方法实施二:
53.说明书附图图2、图3、图6和图7均为磁体2放置方式的磁感线方向相同的情况。现在以说明书附图图2和图6为例子进行详解。
54.如说明书附图图2和图6所示,上方两个磁体2靠近隔磁钢片3一侧为n极、下方两个磁体2靠近隔磁钢片3一侧为s极时。
55.基于双霍尔传感器的运动方向判断装置的方法,包括以下步骤:
56.s1,隔磁钢片3移动,隔磁钢片3其中一个镂空孔4前侧首先对齐第一个霍尔传感器1和磁体2组,使此组的磁体2的磁感线穿过镂空孔4形成的磁场作用于霍尔传感器1,霍尔传感器1输出脉冲数值;第二个霍尔传感器1和磁体2组仍被相邻两个镂空孔4之间的隔磁钢片3阻挡,霍尔传感器1不受磁场影响,霍尔传感器 1为零值;
57.s2,隔磁钢片3进一步移动,镂空孔4前侧对齐第二个霍尔传感器1和磁体2 组,使此组的磁体2的磁感线也穿过镂空孔4形成的磁场作用于霍尔传感器1,霍尔传感器1输出脉冲数值;
58.s3,通过观测两个霍尔传感器1输出脉冲数值的先后顺序来判断隔磁钢片3 运动方向。
59.结合附图详解,即:
60.若隔磁钢片3沿着说明书附图图2和图6中a箭头所示运动方向运动时,镂空孔4前侧首先对齐左侧霍尔传感器1和磁体2组,使此组的磁体2的磁感线(磁感线方向:从上往下方向)穿过镂空孔4形成的磁场作用于霍尔传感器1,霍尔传感器 1输出脉冲数值“+1左”;第二个霍尔传感器1和磁体2组仍被相邻两个镂空孔4之间的隔磁钢片3阻挡,霍尔传感器1不受磁场影响,霍尔传感器1为零值;
61.隔磁钢片3进一步移动,镂空孔4前侧对齐右侧霍尔传感器1和磁体2组,使此组的磁体2的磁感线(磁感线方向:从下往上方向)也穿过镂空孔4形成的磁场作用于霍尔传感器1,霍尔传感器1输出脉冲数值“+1右”;
62.因此两个脉冲值都为:“+1”,但是两个“+1”脉冲值的先后循序为“左先右后”,所以
运动方向为隔磁钢片3“从左向右”。对于圆周运动而言为“逆时针”运动。
63.同理,若隔磁钢片3沿着说明书附图图2和图6中b箭头所示运动方向运动时,镂空孔4前侧首先对齐右侧霍尔传感器1和磁体2组,使此组的磁体2的磁感线(磁感线方向:从下往上方向)穿过镂空孔4形成的磁场作用于霍尔传感器1,霍尔传感器1输出脉冲数值“+1右”;第二个霍尔传感器1和磁体2组仍被相邻两个镂空孔4之间的隔磁钢片3阻挡,霍尔传感器1不受磁场影响,霍尔传感器1为零值;
64.隔磁钢片3进一步移动,镂空孔4前侧对齐左侧霍尔传感器1和磁体2组,使此组的磁体2的磁感线(磁感线方向:从上往下方向)也穿过镂空孔4形成的磁场作用于霍尔传感器1,霍尔传感器1输出脉冲数值“+1左”;
65.因此两个脉冲值都为:“+1”,但是两个“+1”脉冲值的先后循序为“右先左后”,所以运动方向为隔磁钢片3“从右向左”。对于圆周运动而言为“顺时针”运动。
66.两种运动方向输出的脉冲值相同,a箭头所示运动方向时为:“左先右后”, b箭头所示运动方向为“右先左后”,因此,通过观测两个霍尔传感器1输出脉冲数值的先后顺序来判断隔磁钢片3运动方向。
67.综上所述:
68.如上述使用方法,本装置通过两个霍尔传感器1、两个磁体2以及一个运动的带有镂空孔4的隔磁钢片3进行运动方向检测,相比于多光电开关的检测装置不仅减低成本而且够达到防尘的效果;相比于两侧是霍尔芯片中间是磁铁随物体运动的方式,大大减少了磁铁的加入会带来成本的增加和自重的增大的不足,大大减轻了装置的自重、降低了整个检测系统的成本。本运动方向判断装置不但可以运用在直线运动也可用在圆周应用的场景,比如汽车安全带收放轴的运动方向的测量,汽车轮胎转动的方向的测量。特别是改进了现有汽车安全带收放轴的运动方向测量装置及方法。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1