数据采集装置和无人系统的制作方法
1.本实用新型涉及数据采集技术领域,尤其涉及一种数据采集装置和无人系统。
背景技术:
2.在数据采集中经常需要利用多种传感器采集不同种类相关信息,以获取设备本身运行状态并感知周围环境状况,进而生成指示信息以指示操作员准确操作或者在无人控制的系统中准确地作出决策。
3.目前使用的传感器主要有惯性测量单元(inertial measurement unit,imu)、全球导航卫星系统(global navigation satellite system,gnss)和相机(camera)。
4.现有技术中,通常采用imu和gnss二合一的传感器,很难应用到高帧率输出的图像采集场合。同时,为了使得多个传感器采集到的数据同步,通常需要额外的高精度时钟源提供时钟信号,成本较大。
技术实现要素:
5.有鉴于此,本实用新型实施例的目的在于提供一种数据采集装置和无人系统,可以使得多个传感器采集到的数据同步,同时,将惯性检测单元和定位单元设置为独立的传感器,使得数据采集装置可以应用在高帧率输出的场合,而且不需要设置外部时钟源,降低成本。
6.第一方面,本实用新型实施例提供了一种数据采集装置,所述装置包括:
7.惯性检测单元,用于生成时钟信号,并采集第一数据;
8.分频单元,与所述惯性检测单元连接,用于根据所述时钟信号生成第一触发信号、第二触发信号和至少一个第三触发信号;
9.定位单元,与所述分频单元连接,用于根据所述第一触发信号采集第二数据;
10.至少一个第一图像采集单元,与所述分频单元连接,用于根据所述第二触发信号采集第三数据;以及
11.处理单元,分别与所述惯性检测单元、定位单元和第一图像采集单元连接,用于响应于接收到第三触发信号,获取所述第一数据、第二数据和第三数据。
12.优选地,所述第一触发信号和第三触发信号同步,且相对于所述第二触发信号具有第一延时。
13.优选地,所述第一延时为第一曝光时长;
14.其中,所述第一曝光时长为所述第一图像采集单元在接收到所述第二触发信号到开始采集有效像素前的总时长。
15.优选地,所述装置还包括:
16.至少一个第二图像采集单元,与所述第一图像采集单元连接;
17.其中,所述第一图像采集单元用于在接收到所述第二触发信号后,生成第四触发信号;
18.所述第二图像采集单元用于根据所述第四触发信号采集第四数据。
19.优选地所述第四触发信号与所述第二触发信号同步。
20.优选地,所述第一图像采集单元用于在接收到所述第二触发信号后,经过第二延时后采集所述第三数据。
21.优选地,所述第二延时为第二曝光时长;
22.其中,所述第二曝光时长为所述第二图像采集单元在接收到所述第四触发信号到开始采集有效像素前的总时长。
23.优选地,所述第一延时为所述第一曝光时长与所述第二曝光时长之和。
24.优选地,所述第四触发信号相对于所述第二触发信号具有第三延时。
25.优选地,所述第一图像采集单元用于在接收到所述第二触发信号后,经过所述第四延时后采集所述第三数据。
26.优选地,所述第四延时为第二曝光时长与所述第三延时之和;
27.其中,所述第二曝光时长为所述第二图像采集单元在接收到所述第四触发信号到开始采集有效像素前的总时长。
28.优选地,所述第一延时为所述第一曝光时长、所述第二曝光时长和所述第三延时之和。
29.优选地,所述定位单元还用于生成校准信号;
30.其中,所述分频单元还用于根据所述校准信号对所述第一触发信号、第二触发信号和第三触发信号进行校准。
31.优选地,所述数据采集装置还包括存储单元;
32.所述处理单元还用于对所述第一数据、第二数据、第三数据和第四数据中至少一个添加时间戳并存储在所述存储单元。
33.优选地,所述处理单元还用于对所述第一数据、第二数据、第三数据和第四数据中至少两个进行融合以获取融合数据。
34.第二方面,本实用新型实施例提供了一种无人系统,所述无人系统包括:
35.如第一方面所述的数据采集装置;以及
36.控制装置,用于根据所述数据采集装置采集的数据进行无人控制。
37.本实用新型实施例的技术方案通过惯性检测单元提供时钟信号,分频单元根据时钟信号生成第一触发信号、第二触发信号和第三触发信号,分别输出到定位单元、图像采集单元和处理单元,处理单元接收到第三触发信号后,获取惯性检测单元、定位单元和图像采集单元采集到的数据。由此,可以使得多个传感器采集到的数据同步,同时,将惯性检测单元和定位单元设置为独立的传感器,使得数据采集装置可以应用在高帧率输出的场合,而且不需要设置外部时钟源,降低成本。
附图说明
38.通过以下参照附图对本实用新型实施例的描述,本实用新型的上述以及其它目的、特征和优点将更为清楚,在附图中:
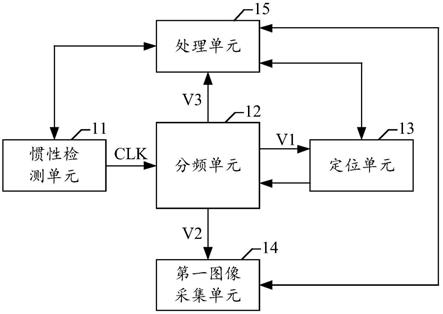
39.图1是本实用新型第一实施例的数据采集装置的示意图;
40.图2是本实用新型实施例的惯性检测单元的示意图;
41.图3是本实用新型实施例的第一图像采集单元的图像输出时序的示意图;
42.图4是本实用新型第一实施例的触发信号的示意图;
43.图5是本实用新型实施例的校准信号的示意图;
44.图6是本实用新型第二实施例的数据采集装置的示意图;
45.图7是本实用新型第二实施例的触发信号的示意图;
46.图8是本实用新型实施例的无人系统的示意图。
具体实施方式
47.以下基于实施例对本实用新型进行描述,但是本实用新型并不仅仅限于这些实施例。在下文对本实用新型的细节描述中,详尽描述了一些特定的细节部分。对本领域技术人员来说没有这些细节部分的描述也可以完全理解本实用新型。为了避免混淆本实用新型的实质,公知的方法、过程、流程、元件和电路并没有详细叙述。
48.此外,本领域普通技术人员应当理解,在此提供的附图都是为了说明的目的,并且附图不一定是按比例绘制的。
49.同时,应当理解,在以下的描述中,“电路”是指由至少一个元件或子电路通过电气连接或电磁连接构成的导电回路。当称元件或电路“连接到”另一元件或称元件/电路“连接在”两个节点之间时,它可以是直接耦接或连接到另一元件或者可以存在中间元件,元件之间的连接可以是物理上的、逻辑上的、或者其结合。相反,当称元件“直接耦接到”或“直接连接到”另一元件时,意味着两者不存在中间元件。
50.除非上下文明确要求,否则在说明书的“包括”、“包含”等类似词语应当解释为包含的含义而不是排他或穷举的含义;也就是说,是“包括但不限于”的含义。
51.在本实用新型的描述中,需要理解的是,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性。此外,在本实用新型的描述中,除非另有说明,“多个”的含义是两个或两个以上。
52.图1是本实用新型实施例的数据采集装置的示意图。如图1所示,本实用新型实施例的数据采集装置包括惯性检测单元11、分频单元12、定位单元13、至少一个第一图像采集单元14和处理单元15。其中,惯性检测单元11用于生成时钟信号,并采集第一数据。分频单元12与所述惯性检测单元连接,用于根据所述时钟信号生成第一触发信号、第二触发信号和至少一个第三触发信号。定位单元13与所述分频单元连接,用于根据所述第一触发信号采集第二数据。至少一个第一图像采集单元14与所述分频单元连接,用于根据所述第二触发信号采集第三数据。处理单元15分别与所述惯性检测单元、定位单元和第一图像采集单元连接,用于响应于接收到第三触发信号,获取所述第一数据、第二数据和第三数据。
53.在本实施例中,惯性检测单元11用于生成时钟信号clk,并采集第一数据。
54.进一步地,图2是本实用新型实施例的惯性检测单元的示意图。如图2所示,本实用新型实施例的惯性检测单元包括时钟源111、角速度传感器112、加速度传感器113和模数转换器114。
55.在本实施例中,时钟源111用于产生预定频率的时钟信号clk。由此,可以将惯性检测单元作为时钟源,不需要设置外部时钟源,可以减小数据采集装置的成本和体积,同时可以减小电路设计的复杂程度。
56.可选地,时钟源111生成的时钟信号clk的频率为200hz。
57.在本实施例中,角速度传感器112用于采集角速度信号。
58.进一步地,所述角速度传感器112为陀螺仪。
59.进一步地,本实施例对陀螺仪的数量和轴数不作限制。可以是一个或多个单轴陀螺仪、3轴陀螺仪、6轴陀螺仪或9轴陀螺仪等,具体可以根据实际应用场景确定。
60.进一步地,所述角速度传感器112能够测量角速度并输出角速度信号,所述角速度信号为模拟信号。
61.在本实施例中,所述加速度传感器113是能够测量加速度的传感器。通常由质量块、阻尼器、弹性元件、敏感元件和适调电路等部分组成。传感器在加速过程中,通过对质量块所受惯性力的测量,利用牛顿第二定律获得加速度信号。所述加速度信号为模拟信号。
62.进一步地,加速度传感器113可以通过现有的各种传感器实现,本实用新型实施例对此不作限制。
63.在本实施例中,模数转换器114用于将所述角速度信号和加速度信号转换为数字信号。
64.在一个可选的实现方式中,所述惯性检测单元11包括一个模数转换器,将所述角速度信号和加速度信号转换为数字信号。具体地,角速度传感器112和加速度传感器113的输出信号经过调理电路转换成差分信号输出给所述模数转换器,角速度传感器112的输出是差分信号电压信号,经运放转换成单端电压信号,加速度传感器113的输出是电流信号,可以通过电阻变换成电压信号,这样角速度传感器112和加速度传感器113的信号统一成单端电压信号,再经过运放转换成模数转换器114所需的输入信号,模数转换器114将输入信号转换为对应的数字信号。由此,即可生成第一数据,所述第一数据包括角速度信号和加速度信号。
65.在另一个可选的实现方式中,所述惯性检测单元11包括两个模数转换器114。一个模数转换器将加速度信号转换为对应的数字信号,一个模数转换器将角速度信号转换为对应的数字信号。由此,即可生成第一数据,所述第一数据包括角速度信号和加速度信号。
66.进一步地,所述模数转换器可以通过现有各种模数转换器实现,本实用新型实施例对此不作限制。例如,模数转换器为逐次逼近型模数转换器等。
67.应理解,图2以所述惯性检测单元11包括角速度传感器112和加速度传感器113为例进行说明,但本实施例对此不作限制。例如,惯性检测单元11可以只包括角速度传感器112,此时,第一数据为角速度信号。又例如,惯性检测单元11还可以只包括加速度传感器113,此时,第一数据为加速度信号。
68.在本实施例中,分频单元12与所述惯性检测单元11连接,接收所述惯性检测单元11输出的时钟信号clk,根据所述时钟信号clk生成第一触发信号v1、第二触发信号v2和至少一个第三触发信号v3。其中,第一触发信号v1输出至定位单元13,第二触发信号v2输出至第一图像采集单元14,第三触发信号v3输出至处理单元15。
69.进一步地,所述第一触发信号、第二触发信号和第三触发信号为脉冲信号。
70.进一步地,第一触发信号v1可以是一个或多个,具体根据定位单元13的数量确定。第二触发信号v2也可以是一个或多个,具体根据第一图像采集单元13的数量确定。本实用新型实施例以所述数据采集装置只包括一个定位单元13和一个第一图像采集单元为例进
行说明。
71.进一步地,所述分频单元12对所述时钟信号进行分频以生成所述第一触发信号v1、第二触发信号v2和第三触发信号v3。
72.优选地,所述第一触发信号v1、第二触发信号v2和第三触发信号v3均为25hz。
73.应理解,本实用新型实施例对上述时钟信号clk、第一触发信号v1、第二触发信号v2和第三触发信号v3的频率不作限制,可以根据实际使用场景设置。其中,时钟信号clk为第一触发信号v1、第二触发信号v2和第三触发信号v3的整数倍。
74.在本实施例中,定位单元13为gnss(global navigation satellite system,全球导航卫星系统)模块。gnss是能在地球表面或近地空间的任何地点为用户提供全天候的三维坐标和速度以及时间信息的空基无线电导航定位系统。
75.进一步地,所述gnss可以是全球系统、区域系统和增强系统等,其中,全球系统包括gps(global positioning system,全球定位系统)、glonass(global navigation satellite system,全球卫星导航系统)、galileo(伽利略卫星导航系统)和北斗卫星导航系统等。区域系统包括qzss(quasi
‑
zenith satellite system,准天顶卫星系统)和irnss(indian regional navigation satellite system,印度区域导航卫星系统)等。增强系统包括waas(wide area augmentation system,广域增强系统)、egnos(european geostationary navigation overlay service,欧洲静地导航重叠系统)和msas(multi
‑
functional satellite augmentation system,多功能运输卫星增强系统)等。
76.具体地,定位单元13接收到第一触发信号后,获取卫星信号并解析以获取第二数据,并将所述第二数据以数字信号的形式输出。所述第二数据包括时间信息、位置信息和经纬度信息中一种或多种。
77.由此,可以将gnss模块和imu模块设置为独立的传感器,在采集数据时可以互不影响,实现高帧率输出。
78.在本实施例中,第一图像采集单元14在接收到第二触发信号后,开始采集第三数据,并将所述第三数据以数字信号的形式输出。所述第三数据为图像数据。
79.进一步地,图3是本实用新型实施例的第一图像采集单元的图像输出时序的示意图。如图3所示,t1为一帧的时间(如果是第一触发信号的频率为25hz,那么t1为40ms)。t2为blank time,即v1不活动的时间。t3为v1到href的时间,即v1下降沿到开始采集有效像素前的时间(start time)。这个时间用来对电势井进行复位,也包括了对无效行(dummy line)的采集的时间。t4为采集一整行的时间。其中,t6是一行中活动像素的采集时间,t7是一行采集完之后的空白时间(horizontal blanking)。最后一行采集完成后会有一个t5,即href到v1的时间。t5+t7通常称为结束时间(end time),其中d[11:0]表示数据信号。
[0080]
进一步地,所述第一触发信号和第三触发信号同步,且相对于所述第二触发信号具有第一延时。
[0081]
进一步地,所述第一触发信号、第二触发信号和第三触发信号为脉冲信号。
[0082]
进一步地,所述第一触发信号和第三触发信号同步,且相对于所述第二触发信号具有第一延时具体为:
[0083]
在一个采集周期内,所述第一触发信号和第三触发信号的上升沿同步,且相对于所述第二触发信号的上升沿具有第一延时。或者,在一个采集周期内,所述第一触发信号和
第三触发信号的下降沿同步,且相对于所述第二触发信号的下降沿具有第一延时。
[0084]
进一步地,所述第一延时为第一曝光时长,所述第一曝光时长为所述第一图像采集单元在接收到所述第二触发信号到开始采集有效像素前的总时长。
[0085]
具体地,由于第一图像采集单元14在采集图像数据时,从接收到第二触发信号到开始采集图像数据需要一定的时间间隔,为了让图像采集的时间与惯性测量单元和定位单元采集数据的时间严格对齐,需要使用曝光开始的时间,而不是帧开始的时间,因此需要考虑这段固定的时延,即t2+t3。这段时长需要根据实际使用的第一图像采集单元的寄存器设置来确定,或者进行精确测量来确定。t2+t3这段时长即为所述第一图像采集单元在接收到所述第二触发信号到开始采集有效像素前的总时长。也即,第一触发信号和第三触发信号的上升沿相对于第二触发信号的上升沿延迟t2+t3。
[0086]
具体地,图4是本实用新型实施例的触发信号的示意图。如图4所示,t1
‑
t3(或t5
‑
t7)时间段即为图3中的t2+t3。
[0087]
由此,可以消除第一图像采集单元的曝光时间的影响,使得惯性检测单元、定位单元和第一图像采集单元能够同一时刻开始采集数据,从而实现第一数据、第二数据和第三数据的数据同步。
[0088]
可选地,所述分频单元12包括分频模块和至少一个延时模块,所述分频模块用于根据所述脉冲信号clk生成第一脉冲信号、第二脉冲信号和第三脉冲信号,所述第一脉冲信号、第二脉冲信号和第三脉冲信号为同步信号。所述第一脉冲信号和第二脉冲信号通过所述延时模块进行延时后,生成第一触发信号和第三触发信号。所述第二脉冲信号为所述第二触发信号。
[0089]
进一步地,所述至少一个延时模块可以是两个,包括第一延时模块和第二延时模块,所述第一延时模块用于对所述第一脉冲信号进行延时以生成所述第一触发信号,所述第二延时模块用于对所述第三脉冲信号进行延时以生成所述第三触发信号。
[0090]
进一步地,上述延时模块可以采用现有的各种延时电路或延时装置实现,本实用新型实施例对此不作限制。
[0091]
进一步地,所述第一图像采集单元14可以通过现有的各种具有摄像功能的设备实现,例如摄像头和行车记录仪等。
[0092]
在本实施例中,处理单元15分别与所述惯性检测单元11、定位单元13和第一图像采集单元14连接,在接收到第三触发信号时,分别从惯性检测单元11、定位单元13和第一图像采集单元14中获取第一数据、第二数据和第三数据。
[0093]
进一步地,所述第三触发信号为中断信号。处理单元15在接收到第三触发信号时,中断正在执行的任务,并开始上述数据获取任务。
[0094]
可选地,处理单元15与惯性检测单元11通过i2c总线、spi总线或其它接口连接。
[0095]
可选地,处理单元15与定位单元13通过uart(universal asynchronous receiver/transmitter,异步收发传输器)连接。
[0096]
可选地,处理单元15与第一图像采集单元14通过mipi(mobile industry processor interface,移动产业处理器接口)连接。
[0097]
进一步地,第一图像采集单元14在采集图像数据时涉及到三个时刻,第二触发信号的上升沿(或下降沿)时刻,第一图像采集单元14触发数据采集的时刻,以及,第一图像采
集单元14开始到有效像素的时刻。本实施例中,第二触发信号的上升沿(或下降沿)时刻即为第一图像采集单元14触发数据采集的时刻。
[0098]
由于第一图像采集单元14在采集图像数据时需要进行曝光,从接收到第二触发信号到开始采集到有效像素时需要一定的时间间隔。由此,为了使得第一数据、第二数据和第三数据同步,分频单元12在生成所述第一触发信号、第二触发信号和第三触发信号时,将所述第一触发信号和第三触发信号同步,且,将所述第一触发信号和第三触发信号的上升沿相对于所述第二触发信号的上升沿具有第一延时,以使得惯性检测单元11、定位单元13和第一图像采集单元14能够同时开始采集第一数据、第二数据和第三数据,以实现数据同步。
[0099]
应理解,上述第一触发信号触发定位单元采集第二数据,或,第二触发信号触发第一图像采集单元采集第三数据,或第三触发信号触发处理单元获取数据的过程中,可以是在脉冲信号的上升沿触发,也可以是在下降沿触发,本实用新型实施例对此不作限制。
[0100]
本实用新型实施例通过惯性检测单元提供时钟信号,分频单元根据时钟信号生成第一触发信号、第二触发信号和第三触发信号,分别输出到定位单元、图像采集单元和处理单元,处理单元接收到第三触发信号后,获取惯性检测单元、定位单元和图像采集单元采集到的数据。由此,可以使得多个传感器采集到的数据同步,同时,将惯性检测单元和定位单元设置为独立的传感器,使得数据采集装置可以应用在高帧率输出的场合,而且不需要设置外部时钟源,降低成本。
[0101]
同时,为了进一步减小由于惯性检测单元内部的时钟源由于时间飘移而带来的累积误差,本实用新型实施例的定位单元还用于生成校准信号。
[0102]
进一步地,所述校准信号为1pps(脉冲数/秒)信号。即,所述校准信号的频率为1hz。
[0103]
具体地,图5是本实用新型实施例的校准信号的示意图。如图5所示,t9
‑
t11的时间间隔为1秒,t9
‑
t10(或t11
‑
t12)为脉宽时间。
[0104]
应理解,图5仅为本本实用新型的一个示例,本实用新型实施例对校准信号的频率不作限制,也可以是其它频率,例如5hz或10hz等。
[0105]
进一步地,所述分频单元还用于根据所述校准信号对所述第一触发信号、第二触发信号和第三触发信号进行校准。
[0106]
由此,可以使得每秒对第一触发信号、第二触发信号和第三触发信号校准一次,使得第一触发信号、第二触发信号和第三触发信号与校准信号具有相同的起点,减小由于时钟源的时间飘移而带来的累积误差,提高第一数据、第二数据和第三数据的同步精度。
[0107]
在一个可选的实现方式中,所述处理单元还可以对采集到的第一数据、第二数据和第三数据进行融合。
[0108]
在另一个可选的实现方式中,所述数据采集装置还包括存储单元,所述存储单元。所述处理单元还用于对所述第一数据、第二数据和第三数据分别添加时间戳并存储在所述存储单元。具体地,所述处理单元可以利用所述惯性检测单元的时钟源的时间信息为所述第一数据、第二数据和第三数据添加时间戳。
[0109]
进一步地,上述处理单元可以通过mcu(microcontroller unit,微控制单元)、plc(programmable logic controller,可编程逻辑控制器)、fpga(field-programmable gate array,现场可编程门阵列)、dsp(digital signal processor,数字信号处理器)或
asic(application specific integrated circuit,专用集成电路)来实现。
[0110]
本实用新型实施例通过惯性检测单元提供时钟信号,分频单元根据时钟信号生成第一触发信号、第二触发信号和第三触发信号,分别输出到定位单元、图像采集单元和处理单元,处理单元接收到第三触发信号后,获取惯性检测单元、定位单元和图像采集单元采集到的数据。由此,可以使得多个传感器采集到的数据同步,同时,将惯性检测单元和定位单元设置为独立的传感器,使得数据采集装置可以应用在高帧率输出的场合,而且不需要设置外部时钟源,降低成本。
[0111]
图6是本实用新型第二实施例的数据采集装置的示意图。如图6所示,本实用新型实施例的数据采集装置包括惯性检测单元21、分频单元22、定位单元23、至少一个第一图像采集单元24、处理单元25和至少一个第二图像采集单元26。其中,惯性检测单元21用于生成时钟信号,并采集第一数据。分频单元22与所述惯性检测单元21连接,用于根据所述时钟信号生成第一触发信号、第二触发信号和至少一个第三触发信号。定位单元23与所述分频单元22连接,用于根据所述第一触发信号采集第二数据。第一图像采集单元24与所述分频单元22连接,用于根据所述第二触发信号采集第三数据,并生成第四触发信号。第二图像采集单元26与所述第一图像采集单元24连接,用于根据所述第四触发信号采集第四数据。处理单元25分别与所述惯性检测单元21、定位单元23、第一图像采集单元24和第二图像采集单元26连接,用于响应于接收到第三触发信号,获取所述第一数据、第二数据、第三数据和第四数据。
[0112]
在本实施例中,惯性检测单元21用于采集第一数据并生成时钟信号,具体可参照上述第一实施例中所述,本实施例对此不再赘述。
[0113]
在本实施例中,分频单元22与所述惯性检测单元21连接,接收所述惯性检测单元21输出的时钟信号clk,根据所述时钟信号clk生成第一触发信号v1、第二触发信号v2和至少一个第三触发信号v3。其中,第一触发信号v1输出至定位单元23,第二触发信号v2输出至第一图像采集单元24,第三触发信号v3输出至处理单元25。
[0114]
进一步地,所述第一触发信号、第二触发信号和第三触发信号为脉冲信号。
[0115]
进一步地,第一触发信号v1可以是一个或多个,具体根据定位单元23的数量确定。第二触发信号v2也可以是一个或多个,具体根据第一图像采集单元24的数量确定。本实用新型实施例以所述数据采集装置只包括一个定位单元23和一个第一图像采集单元24为例进行说明。
[0116]
进一步地,所述分频单元12对所述时钟信号进行分频以生成所述第一触发信号v1、第二触发信号v2和第三触发信号v3。
[0117]
优选地,所述第一触发信号v1、第二触发信号v2和第三触发信号v3均为25hz。
[0118]
应理解,本实用新型实施例对上述时钟信号clk、第一触发信号v1、第二触发信号v2和第三触发信号v3的频率不作限制,可以根据实际使用场景设置。其中,时钟信号clk为第一触发信号v1、第二触发信号v2和第三触发信号v3的整数倍。
[0119]
在本实施例中,定位单元23用于根据所述第一触发信号v1采集第二数据,同时,生成校准信号提供给分频单元22,分频单元22根据所述校准信号对所述第一触发信号、第二触发信号和第三触发信号进行校准。具体可参照上述第一实施例中所述,本实施例对此不再赘述。
[0120]
在本实施例中,第二图像采集单元26与所述第一图像采集单元24连接,所述第一图像采集单元24用于在接收到所述第二触发信号后,生成第四触发信号v4,所述第二图像采集单元24用于根据所述第四触发信号v4采集第四数据。
[0121]
在本实施例中,所述第四触发信号v4相对于所述第二触发信号v2具有第二延时。具体如图7所示,在图7中,第一触发信号v1和第三触发信号v3同步,所述第四触发信号v4相对于所述第二触发信号v2具有第二延时。
[0122]
进一步地,第一触发信号v1或第三触发信号v3相对于第二触发信号v2具有第一延时,所述第一延时为图中t13
‑
t17时间段或t14
‑
t18时间段。
[0123]
进一步地,如上所述,由于第一图像采集单元24在触发采集图像后,需经过第一曝光时长之后才能采集到有效图像,同理,第二图像采集单元26在触发采集图像后,需经过第二曝光时长之后才能采集到有效图像。其中,所述第一曝光时长为所述第一图像采集单元24在触发采集图像到开始采集有效像素前的总时长,所述第二曝光时长为所述第二图像采集单元26在触发采集图像到开始采集有效像素前的总时长。
[0124]
本实施例以脉冲信号上升沿触发图像采集且第一曝光时长与第二曝光时长相等为例进行说明。
[0125]
对于第一图像采集单元24来说,在接收到第二触发信号v2后,经过第二延时后触发采集有效像素,由于第一图像采集单元24在触发采集图像到开始采集有效像素之间有第一曝光时长,使得第一图像采集单元24的采集有效像素的时刻与第二触发信号v2的上升沿之间的时间段为第一曝光时长与第二延时的和。
[0126]
对于第二图像采集单元26来说,在接收到第四触发信号v4后,经过第二曝光时长开始采集有效像素。由于第二图像采集单元26在触发采集图像到开始采集有效像素之间有第二曝光时长,且所述第四触发信号v4相对于所述第二触发信号v2具有第二延时,使得第二图像采集单元26的采集有效像素的时刻与第二触发信号v2的上升沿之间的时间段为第二曝光时长与第二延时的和。
[0127]
由于第一曝光时长与第二曝光时长相等,使得第一图像采集单元24和第二图像采集单元26可以同时开始采集有效像素,以实现第三数据和第四数据的同步。
[0128]
进一步地,所述第一触发信号相对于所述第二触发信号具有第一延时,所述第一延时为所述第二曝光时长与第二延时之和。由此,可以使得第二数据和第三数据同步。
[0129]
由此,通过上述方式即可实现第二数据、第三数据和第四数据同步。
[0130]
进一步地,所述第一触发信号和第三触发信号同步,可以使得第一数据与第二数据、第三数据和第四数据同步。
[0131]
由此,即可实现数据同步采集。
[0132]
应理解,上述实施例以所述第一图像采集单元24和第二图像采集单元26的曝光时长相等为例进行说明,但本实用新型实施例对此不作限制,所述第一图像采集单元24和第二图像采集单元26的曝光时长也可以是不相同。
[0133]
例如,第一图像采集单元24的第一曝光时长不等于第二图像采集单元26的第二曝光时长。此时,可将第一触发信号v1和第三触发信号v3设置为同步,且相对于所述第二触发信号v2具有第一延时,所述第一延时为第一曝光时长、第二曝光时长与第二延时的和。第一图像采集单元24在接收到第二触发信号v2后,经过第二曝光时长与第二延时之后,触发采
集图像。第二图像采集单元26在接收到第四触发信号v4后,经过第一曝光时长之后,触发采集图像。由于第一图像采集单元24在触发采集图像到开始采集有效像素之间有第一曝光时长,使得第一图像采集单元24的采集有效像素的时刻与第二触发信号v2的上升沿之间的时间段为第一曝光时长、第二曝光时长与第二延时的和。同时,由于第二图像采集单元26在触发采集图像到开始采集有效像素之间有第二曝光时长,且第四触发信号v4相对于所述第二触发信号v2具有第二延时,使得第二图像采集单元26的采集有效像素的时刻与第二触发信号v2的上升沿之间的时间段为第一曝光时长、第二曝光时长与第二延时的和。由此,可以使得第三数据和第四数据同步。
[0134]
同时,设置所述第一延时为第一曝光时长、第二曝光时长与第二延时的和,使得第二数据与第三数据和第四数据同步。
[0135]
同时,设置第一触发信号和第三触发信号同步可以使得第一数据和第二数据同步。
[0136]
由此,即可实现第一数据、第二数据、第三数据和第四数据同步。
[0137]
可选地,所述分频单元22包括分频模块和至少一个延时模块,所述分频模块用于根据所述脉冲信号clk生成第一脉冲信号、第二脉冲信号和第三脉冲信号,所述第一脉冲信号、第二脉冲信号和第三脉冲信号为同步信号。所述第一脉冲信号和第二脉冲信号通过所述延时模块进行延时后,生成第一触发信号和第三触发信号。所述第二脉冲信号为所述第二触发信号。
[0138]
进一步地,所述至少一个延时模块可以是两个,包括第一延时模块和第二延时模块,所述第一延时模块用于对所述第一脉冲信号进行延时以生成所述第一触发信号,所述第二延时模块用于对所述第三脉冲信号进行延时以生成所述第三触发信号。
[0139]
进一步地,上述延时模块可以采用现有的各种延时电路或延时装置实现,本实用新型实施例对此不作限制。
[0140]
在一个可选的实现方式中,所述处理单元还可以对采集到的第一数据、第二数据和第三数据进行融合。
[0141]
在另一个可选的实现方式中,所述数据采集装置还包括存储单元,所述存储单元。所述处理单元还用于对所述第一数据、第二数据和第三数据分别添加时间戳并存储在所述存储单元。具体地,所述处理单元可以利用所述惯性检测单元的时钟源的时间信息为所述第一数据、第二数据和第三数据添加时间戳。
[0142]
进一步地,上述处理单元可以通过mcu(microcontroller unit,微控制单元)、plc(programmable logic controller,可编程逻辑控制器)、fpga(field-programmable gate array,现场可编程门阵列)、dsp(digital signal processor,数字信号处理器)或asic(application specific integrated circuit,专用集成电路)来实现。
[0143]
本实用新型实施例通过惯性检测单元提供时钟信号,分频单元根据时钟信号生成第一触发信号、第二触发信号和第三触发信号,分别输出到定位单元、图像采集单元和处理单元,处理单元接收到第三触发信号后,获取惯性检测单元、定位单元和图像采集单元采集到的数据。由此,可以使得多个传感器采集到的数据同步,同时,将惯性检测单元和定位单元设置为独立的传感器,使得数据采集装置可以应用在高帧率输出的场合,而且不需要设置外部时钟源,降低成本。
[0144]
进一步地,本实用新型实施例还提供了一种无人系统。如图6所示,本实用新型实施例的无人系统可以是无人机、自动驾驶汽车等设备,以自动驾驶汽车为例进行说明,无人系统包括控制装置2和上述的数据采集装置1。
[0145]
进一步地,所述数据采集装置的惯性检测单元、分频单元、定位单元、第一图像采集单元、第二图像采集单元和处理单元设置在所述车辆的车体上。
[0146]
进一步地,数据采集装置用于通过多个传感器采集数据。
[0147]
在一个可选的实现方式中,所述数据采集装置1可以对采集到的第一数据、第二数据、第三数据和第四数据中的进行融合,以获取融合数据,所述控制装置2根据所述融合数据实现自动驾驶。
[0148]
在另一个可选的实现方式中,所述数据采集装置1可以对采集到的第一数据、第二数据、第三数据和第四数据中的一种或多种分别添加时间戳并存储。其中,所述控制装置2用于从所述数据采集装置1中获取存储的数据,并根据所述时间戳获取同步的第一数据、第二数据、第三数据和第四数据,进而实现自动驾驶。
[0149]
本实用新型实施例通过惯性检测单元提供时钟信号,分频单元根据时钟信号生成第一触发信号、第二触发信号和第三触发信号,分别输出到定位单元、图像采集单元和处理单元,处理单元接收到第三触发信号后,获取惯性检测单元、定位单元和图像采集单元采集到的数据。由此,可以使得多个传感器采集到的数据同步,同时,将惯性检测单元和定位单元设置为独立的传感器,使得数据采集装置可以应用在高帧率输出的场合,而且不需要设置外部时钟源,降低成本。
[0150]
以上所述仅为本实用新型的优选实施例,并不用于限制本实用新型,对于本领域技术人员而言,本实用新型可以有各种改动和变化。凡在本实用新型的精神和原理之内所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1