火山岩深度域相控速度建模方法、存储介质和计算机设备与流程
1.本发明涉及油气地球物理勘探技术领域,尤其涉及一种火山岩相控建模方法、存储介质和计算机设备。
背景技术:
2.历经120多年的勘探,全球已在美国、墨西哥、阿根廷、中国、日本、阿塞拜疆等100多个国家发现了300多个火山岩油气藏(王京红等,2011)。我国自20世纪50年代以来先后在准噶尔盆地、松辽盆地、渤海湾盆地、二连盆地等火山岩的油气勘探中获得重大突破(侯连华等,2011),火山岩逐渐引起了广大地质学者的重视。截止2014年底,我国火山岩中探明石油地质储量达5.4
×
10e8吨以上,探明天然气地质储量达4800
×
10e8立方米以上(王洛等,2015)。目前,火山岩岩性识别方法主要有以下三种:重-磁-电方法识别、地质-测井资料识别和地震方法识别(冉启全等,2005;陈克勇,2010;宫清顺等,2012)。地震识别方法主要采用地震解释技术和地震资料处理技术识别火山岩(伍菁华等,2007)。不同岩相的火山岩其地震反射结构不同,一般采用井-震联合,在地震剖面上刻画不同岩性特征,分析火山岩平面分布规律.国内探区深层火山岩气藏构造特点复杂,常常是由多期次、多个火山口喷发而形成的,造成火山岩相分布在纵横向上变化大,而且火山岩与围岩之间相互交错接触。在地震剖面表现为:火山岩的分布范围难以确定,与围岩之间的关系特点不明显。火山岩地震资料,具有频带窄、信噪比低、构造复杂的特点,常规处理结果火山岩成像精度不高,叠前时间偏移难以保证深层火山岩成像精度,横向速度变化大导致时间偏移成果地层地震资料成像杂乱,影响解释精度,深度偏移能针对性的提供解决方案。但是,受限于速度场精度,对于火山岩层复杂构造,由于火山岩范围一般难以在地质上得到确切认识,处理人员更无从圈定火山岩速度变化范围,进而影响火山岩偏移成像精度。本技术针对火山岩成像问题提出解决方案。以西北顺北区块为例,展示火山岩精细建模后的火山岩内部成像改进和对火山岩下伏地层假象消除效果。
3.在西北的顺北区块油气勘探中,基本要求就是矫正好浅层二叠系火山岩造成的下伏地层假象。其二叠系火山岩厚度比较厚,横向厚度和速度变化非常剧烈,因此对下边中层志留系和深层奥陶系目的层造成了大至几千米小至几百米的断裂假象以及构造抖动假象。该类区块当前勘探开发主要目标是次级断裂和中弱串珠,表征精度的尺度,在几百乃至几十米,不对火山岩影响进行矫正消除的话,根本无法识别有效的串珠与断裂,打井也就无从下手。以上火山岩问题的解决的办法是进行深度域的速度建模与成像,突破时间域无法解决火山岩横向速度突变问题的原理性瓶颈。地质问题很明确,但多年来,有效的解决方案一直难以突破。
技术实现要素:
4.为了解决上述技术问题,本发明实施例提供一种火山岩深度域相控速度建模方法、存储介质和计算机设备。
5.第一方面,本发明提供一种火山岩深度域相控速度建模方法,包括以下步骤:
6.s100,选取目标区域火山岩的初始深度域速度模型,并界定目标区域火山岩顶底界面的层位;
7.s200,对目标区域火山岩进行偏移成像,获得目标区域火山岩初步的偏移成像结果;
8.s300,根据初步的偏移成像结果,利用目标区域火山岩顶底界面的层位计算目标区域火山岩底界面深度误差以及误差速度,并据此确定深度域填充速度,再在目标区域火山岩顶底界面的层位之间填充速度并进行深度域层析,得到目标区域火山岩初步的深度域成像体;
9.s400,根据选定的高密度层析网格,对目标区域火山岩初步的深度域成像体进行高密度层析计算,得到更新的深度域速度体;
10.s500,利用更新的深度域速度体,对目标区域火山岩进行偏移成像,得到更新的深度域成像体;
11.s600,判断更新的深度域成像体中所述目标区域火山岩内部和顶底界的成像是否满足预设条件:
12.若满足预设条件,则目标区域火山岩层的深度域速度建模完成;
13.否不满足预设条件,则返回步骤s200。
14.在一个实施例中,所述步骤s100包括:
15.拾取所述目标区域火山岩顶底界面的层位,其中,所述目标区域火山岩顶层和底层的地震深度域初始速度值的大小在井点处与井速度值的大小基本一致。
16.在一个实施例中,当目标区域火山岩顶层和底层的地震深度域初始速度值的大小在井点处与井速度值的大小之间的偏差小于给定的偏差阈值时,判断目标区域火山岩顶层和底层的地震深度域初始速度值的大小在井点处与井速度值的大小基本一致。
17.在一个实施例中,所述步骤s300包括:
18.301,利用目标区域火山岩底界层位hordi1抽取初始深度域速度模型中的层位速度vel1,并将目标区域火山岩顶底界面之间的填充速度设置为vel1,然后利用vel1进行深度偏移,得到第一深度域成像体vol1;
19.302,在第一深度域成像体vol1上重新解释目标区域火山岩底界层位hordi1,并对其进行平滑处理,得到与hordi1对应的平滑层位hordi1-1
20.303,将平滑层位hordi1-1与目标区域火山岩顶界层位hording0之间的填充速度设置为vel2,其中,vel2=(hordi1-1-hording0)*vel1/(hordi1-hording0),然后利用vel2进行深度偏移,得到第二深度域成像体vol2;
21.304,根据第二深度域成像体vol2,在目标区域火山岩顶底界的层位之间进行深度域层析优化,得到对应的填充速度vel3,然后利用vel3进行深度偏移,得到第三深度域成像体vol3,作为目标区域火山岩初步的深度域成像体。
22.在一个实施例中,所述步骤s400中,所述高密度层析网格的大小不小于20m x20m x20m且不大于200m x200m x100m。
23.在一个实施例中,所述步骤s400中,所述高密度层析网格的大小为不小于50m x50m x50m且不大于150m x150m x80m。
24.在一个实施例中,所述步骤600中,所述预设条件包括:
25.目标区域火山岩内部和顶底界之间的共成像道集的同相轴得到拉平;且
26.目标区域火山岩底界层位与井上的火山岩底界的井分层基本一致。
27.在一个实施例中,当目标区域火山岩内部和顶底界之间的共成像道集的同相轴上翘或者下翘弯度小于给定的弯度阈值时,判断目标区域火山岩内部和顶底界之间的共成像道集的同相轴得到拉平;当目标区域火山岩底界层位与井上的火山岩底界的井分层的深度误差小于给定的误差阈值时,判断所述目标区域火山岩底界层位与井上的火山岩底界的井分层基本一致。
28.第二方面,本发明提供一种存储介质,存储有计算机程序,所述计算机程序被处理器执行时,实现如上所述的火山岩深度域相控速度建模方法的步骤。
29.第三方面,本发明提供一种计算机设备,包括处理器和存储有程序代码的存储介质,所述程序代码被所述处理器执行时,实现如上所述的火山岩深度域相控速度建模方法的步骤。
30.与现有技术相比,本发明实施例至少具备以下优点:
31.针对现有技术中存在的问题,本发明提供火山岩精细深度域相控速度建模技术方案,创建火山岩深度域相控速度建模技术体系,有效消除火山岩剩余抖动和疑似断裂假象,达到比传统技术对应火山岩成像精度更高和消除下伏目的层抖动假象更好的目的。为有效落实井点目标提供可靠数据依据。
附图说明
32.构成本技术的一部分的说明书附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定,在附图中:
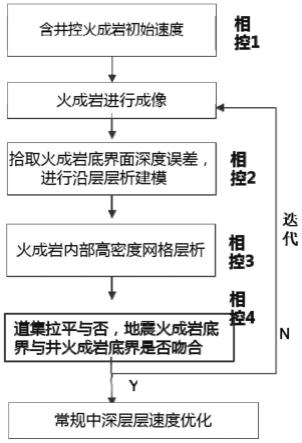
33.图1为本发明实施例一的火山岩相控建模方法的步骤流程图;
34.图2示出了本发明实施例二的与火山岩井速度匹配的初始速度模型的示意图。
35.图3示出了本发明实施例二的hordi0(上边崎岖层位)与hordi1(下边崎岖层位)与hordi1-1(下边平滑层位)的示意图。
36.图4示出了本发明实施例二的火山岩层中间优化速度模型的示意图。
37.图5示出了本发明实施例二的火山岩层相控2剖面,3.25km至3.5km深度内为火山岩,火山岩底界微幅抖动的示意图。
38.图6示出了本发明实施例二的火山岩层中间优化速度模型(高密度层析后速度vel3消除了导致微幅都抖动的速度假象)的示意图。
39.图7示出了本发明实施例二的火山岩层相控3剖面,火山岩底界微幅抖动基本消除的示意图。
具体实施方式
40.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本发明。
41.实施例一
42.本实施例建立一套针对火山岩的深度域相控精细速度建模技术。这里的相控主要
是指井控制、层控制和地震数据驱动,包含相控1、相控2、相控3和相控4等四个主要步骤,详细流程如图1所示,具体包括以下步骤:
43.s100,相控1:定量选取初始深度域速度模型vel-0。
44.通常,常规火山岩建模技术只要求地震速度趋势与井速度趋势吻合即可,而本实施例要求将火山岩顶底界层位解释出来,设火山岩顶层位为hording0,火山岩底界层位为hordi1。本实施例获取地震初始深度域速度方法与常规相同,但要求不同,本实施例要求火山岩顶层和底层的地震深度域初始速度值的大小,在井点处与井速度的量值大小要基本吻合,例如,两者速度相差不大于3%
45.s200,对火山岩部分进行偏移成像,应用常规偏移成像方法(如克希霍夫方法或者逆时偏移方法等)即可。
46.s300,相控2:根据步骤(1)拾取的火山岩顶底界面,计算深度误差,在进行误差速度计算,填充深度域速度,之后再对火山岩顶底界面之间进行常规层析。具体过程如下。
47.301,利用目标区域火山岩底界层位hordi1抽取初始深度域速度模型中的层位速度vel1,并将目标区域火山岩顶底界面之间的填充速度设置为vel1,然后利用vel1进行深度偏移,得到第一深度域成像体vol1;
48.302,在第一深度域成像体vol1上重新解释目标区域火山岩底界层位hordi1,并对其进行平滑处理,得到与hordi1对应的平滑层位hordi1-1
49.303,将平滑层位hordi1-1与目标区域火山岩顶界层位hording0之间的填充速度设置为vel2,其中,vel2=(hordi1-1-hording0)*vel1/(hordi1-hording0),然后利用vel2进行深度偏移,得到第二深度域成像体vol2;
50.304,根据第二深度域成像体vol2,在目标区域火山岩顶底界的层位之间进行深度域层析优化,得到对应的填充速度vel3,然后利用vel3进行深度偏移,得到第三深度域成像体vol3,作为目标区域火山岩初步的深度域成像体。
51.s400,相控3:根据选定的高密度层析网格,对目标区域火山岩初步的深度域成像体进行高密度层析计算,得到更新的深度域速度体。
52.高密度层析技术是2017年以后逐渐开始在产业界应用的技术,主要是其层析所用的网格小于常规层。常规深度域层析及时应用小尺度网格,其网格大小一般在200m x200m x100m以内,高密度层析算法即使是大网格,其尺度也不比这种网格大。在2018以前由于受硬件内存大小和生产时限限制,高密度网格需求内存一般单节点在50g的cup内存以上,且实际生产数据量大,加上与之匹配的算法也少有改进,因此高密度层析一直未在工业界应用。本实施例中应用高密度层析不针对整个数据体,仅针对几百米后的火山岩进行高密度层析,能够大大节省内存和节省计算时间。
53.采用两种方式定量设置火山岩的高密度层析网格。两种方法任选其一:
54.4.1通过地震解释,查找出火山岩层内喷发相、溢流相、沉积相等火山岩相的最小尺度网格,且要求其尺度不小于20m x20m x20m,不大于200m x200m x100m。
55.4.2如果难以提供此类火山岩相的地震解释成果,则高密度层析的网格设置在150m x150m x80m至50m x50m x50m之间即可。
56.之后根据选定的高密度层析网格,针对vol3的火山岩层,进行高密度层析计算,得到更新后的速度体vel4。
57.针对诸如火山岩层的横向速度变化剧烈的地层,常规高密度层析的矩阵求解是难以运行通的,即层析矩阵无法成功求解,进而无法通过高密度层析得到更新的火山岩速度。而本发明虽然网格小,但却基本能够最终求解出对应速度。原因是步骤(1)至步骤(3)进行了严格的火成岩顶底界面的层位拾取和定量的初始速度获取。
58.s500,应用相控3取得的深度域速度vel4对火山岩层段进行偏移成像,得到成像体vol5。该步骤应用常规偏移成像方法(如克希霍夫方法或者逆时偏移方法等)即可。
59.s600,相控4:定量设置继续迭代步骤s200至步骤s500与否的判定标准,看是否需要继续进行速度的迭代循环优化。
60.判定标准是两项,两项需要同时满足,否则均需要循环迭代步骤s200至步骤s500,两项标准具体如下:
61.6.1在s500偏移后,火山岩内部和火山岩顶底界的共成像道集(crp)的同相轴是否得到拉平,如果仍存在明显上翘或者下翘,则需要继续迭代步骤s200至步骤s500,上翘或者下翘弯度满足预设弯度阈值即可,例如在5%以内即可。
62.6.2在s500偏移后,地震体的火山岩底界层位是否与井上的火山岩底界的井分层相吻合。这里吻合是指井震深度误差足预设误差阈值即可,例如在1%以内即可。
63.如果同时满足两项判定保准,则火山岩层的深度域速度建模完成,继续进行火山岩下部层位的速度建模优化。
64.本发明的实施例针对火山岩地层,提供一套精细的深度域速度建模方法,提高火山岩层深度域速度精度,矫正火山岩下层成像假象。火山岩内幕成像精度得到提高。火山岩速度与井速度匹配程度较高,火山岩地震成像的底界层位与井分层吻合度较高。
65.实施例二
66.为便于理解本发明实施例的方案及其效果,以下给出一个具体应用示例。本领域技术人员应理解,该示例仅为了便于理解本发明,其任何具体细节并非意在以任何公式限制本发明。
67.如图2至7所示,在多个探区广泛分布着几千平方公里的火山岩。本实施例采用某西北顺北区块数据,该区勘探开发的基本要求就是矫正好浅层二叠系火山岩造成的下伏地层假象。火山岩厚度比较厚,平均三四百米,且二叠系火山岩横向速度变化非常剧烈,因此对下边中层志留系和深层奥陶系目的层造成了大至几千米小至几百米的断裂假象以及构造抖动假象。该类区块当前勘探开发主要目标是次级断裂和中弱串珠,表征精度的尺度,在几百乃至几十米,不对火山岩影响进行矫正消除的话,根本无法识别有效的串珠与断裂,打井也就无从下手。应用本技术后能取得较常规技术更为可靠的地震数据,在假象去除,目的层断裂和串珠表征上,效果优势明显。按照发明内容的流程,具体应用步骤如下:
68.(1)定量获得初始深度域速度模型,并解释火山岩的顶底界。
69.如图2所示,一条曲线为常规平滑初始深度域速度模型。另一条曲线为本实施例优选的火山岩初始深度域速度模型,其火山岩顶底地震速度与井速度(紫色)吻合度较高。该区火山岩顶位于t46层位下,火山岩底位于t60层位附近。
70.(2)应用常规偏移成像方法对火山岩部分进行偏移成像。
71.相控2:如图3至图5所示,根据上一步骤得到的偏移和常规层析结果,在vol1上重新解释火山岩底界层位hordi1,将hordi1进行大尺度平滑,得到对应的平滑层位hordi1-1。
然后,计算vel2=(hordi1-1-hording0)*vel1/(hordi1-hording0)。然后用vel2进行深度偏移,得到深度域成像体vo l2。其中,图4左边为初始深度域速度模型vel-0,右边为计算得到的vel2;图5左边为初始vel-0对应剖面,中间为步骤(3)相控2效果vol2剖面,右边为常规层析技术剖面。
72.通过图5分析可以发现,相控2与常规效果对比,两者效果大致一致,3.5km的火山岩底界两者都有微幅波浪抖动。之所以要严格的做相控1,是为下边相控3高密度层析服务的。
73.(4)相控3:集成创新应用高密度层析技术,定量设置火山岩层高密度层析网格大小为50mx50mx50m,运用地震数据驱动进行层析。其中,图6的左边为初始深度域速度模型vel-0,右边为计算得到的vel2,中间为高密度层析后速度vel3。
74.应当说明的是,如果相控2初始模型不足够准确,相控3速度的高密度层析反演就不能收敛,所以常规技术要么不用,要么运行不了高密度层析。
75.从图7的相控3效果可以看出,火山岩底界3.5km及其以下层位的微幅抖动基本消除。其中,图7第一部分为初始vel-0对应剖面,第二部分为步骤(3)相控2效果,左边第三部分为步骤(4)相控3效果,第四部分为常规层析技术剖面。
76.(5)应用相控3取得的深度域速度对火山岩部分进行偏移成像得到的步骤相控3效果,运用发明点相控4进行质控,该套实际数据中,火山岩crp道集的同相轴弯度在4%以内,且地震体的火山岩底界层位与井上的火山岩底界井分层相吻合。井震深度误差在1%以内。同时满足相控4两项判定保准,则火山岩层的深度域速度建模完成。不用继续对火山岩层进行速度迭代优化。
77.本实施例针对横向速度变化剧烈的火山岩,提出一套精细的深度域相控速度建模方法。通过分别创建相控1相控2相控3和相控4,并将其组合应用,且在顺北探区进行实际数据应用验证。结果证明,本套技术发明得到的火山岩建模效果在火山岩内部成像和对火山岩下方抖动断裂假象消除等方面,效果较常规技术能得到较大提升。
78.实施例三
79.本实施例提供了一种存储介质,存储有计算机程序,所述计算机程序被处理器执行时,实现如上文所述的火山岩深度域相控速度建模方法,其主要包括以下步骤:
80.s100,选取目标区域火山岩的初始深度域速度模型,并界定目标区域火山岩顶底界面的层位;
81.s200,对目标区域火山岩进行偏移成像,获得目标区域火山岩初步的偏移成像结果;
82.s300,根据初步的偏移成像结果,利用目标区域火山岩顶底界面的层位计算目标区域火山岩底界面深度误差以及误差速度,并据此确定深度域填充速度,再在目标区域火山岩顶底界面的层位之间填充速度并进行深度域层析,得到目标区域火山岩初步的深度域成像体;
83.s400,根据选定的高密度层析网格,对目标区域火山岩初步的深度域成像体进行高密度层析计算,得到更新的深度域速度体;
84.s500,利用更新的深度域速度体,对目标区域火山岩进行偏移成像,得到更新的深度域成像体;
85.s600,判断更新的深度域成像体中所述目标区域火山岩内部和顶底界的成像是否满足预设条件:
86.若满足预设条件,则目标区域火山岩层的深度域速度建模完成;
87.否不满足预设条件,则返回步骤s200。
88.这些程序代码也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程中指定的功能的步骤。
89.存储介质包括永久性和非永久性、可移动和非可移动媒体,可以由任何方法或技术来实现信息存储。信息可以是计算机可读指令、数据结构、程序的模块或其他数据。存储介质的例子可以包括但不限于相变内存(pram)、静态随机存取存储器(sram)、动态随机存取存储器(dram)、其他类型的随机存取存储器(ram)、只读存储器(rom)、电可擦除可编程只读存储器(eeprom)、快闪记忆体或其他内存技术、只读光盘只读存储器(cd-rom)、数字多功能光盘(dvd)或其他光学存储、磁盒式磁带,磁盘存储或其他磁性存储设备或任何其他非传输介质,可用于存储可以被计算设备访问的信息。
90.实施例四
91.本实施例还提供一种计算机设备,包括处理器和存储有程序代码的存储介质,所述程序代码被所述处理器执行时,实现如上文所述的火山岩深度域相控速度建模方法的步骤。
92.在一个实施例中,计算机设备包括一个或多个处理器(cpu)、输入/输出接口、网络接口和内存。
93.内存可能包括计算机可读介质中的非永久性存储器、随机存取存储器(ram)和/或非易失性内存等形式,如只读存储器(rom)或闪存(flash flash ram)。内存是计算机可读介质的示例。
94.需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本技术的示例性实施方式,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
95.应该理解这样使用的术语在适当情况下可以互换,以便这里描述的本技术的实施方式例如能够除了在这里图示或描述的那些以外的顺序实施。
96.应当理解的是,本说明书中的示例性实施方式可以由多种不同的形式来实施,并且不应当被解释为只限于这里所阐述的实施方式。提供这些实施方式是为了使得本技术的公开彻底且完整,并且将这些示例性实施方式的构思充分传达给本领域普通技术人员,而不应当理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1