一种三维空间信息采集分析处理的方法及装置与流程
1.本发明涉及三维空间信息采集分析处理领域,更具体地说,涉及一种三维空间信息采集分析处理的方法及装置。
背景技术:
2.经典面结构光三维信息采集方法需要设备在静态条件下使用才能获得与理论同数量级的精度,其动态条件下工作无法达到静态测量条件下高精度的原因主要是动态标定和动态测量所引入的误差较大,因此需要研究动态标定与动态测量误差补偿方法,使动态测量结果的精度与静态测了结果处于同一数量级。在静态标定过程中,与平面的距离信息是其中重要的环节,因此需要解决基于测距技术的动态标定与误差补偿问题;
3.在传感器拼接使用时,其产生的误差等效于传感器光电转换单元间存在较大“沟壑“以及填充率低所引起的误差,根据前期实验结果积累,其误差分布可由玻尔兹曼函数和反积分函数的组合进行补偿,所要解决的问题就是明确补偿方法中各项的组成和比例;
4.光栅是高精密光学器件,本项目使用的是可以改变调制量的可调式光栅,由于面结构光编码的测量原理,要求调制光在短时间内做出定量变化,因此需要解决微小精密机构的高频高精度控制算法问题。
技术实现要素:
5.针对现有技术中存在的问题,本发明的目的在于提供一种三维空间信息采集分析处理的方法及装置,以解决动态测量时的精度差以及测量慢,范围小的问题。
6.为解决上述问题,本发明采用如下的技术方案。
7.一种三维空间信息采集分析处理的方法及装置,包括以下步骤:
8.s1、三维空间测量装置对待测物进行测量,获得静态测量数据;
9.s2、采用精准的机械移动来构成三维空间测量装置的动态测量条件,并实时高精度测距作为动态测量的参数,三维空间测量装置测量动态状态下待测物进行动态测量;
10.s3、其中可调光栅的控制算法、动态标定及测量误差与传感器拼接参数三种因素作为变量,改变一种以上的因素,将实现动态三维测量获得动态测量数据;
11.s4、对比动态测量数据与静态测量数据,当两者测量精准度误差处于预期数值时证明误差补偿确定,若两者测量精准度误差过大不处于预期数值时证明补偿失败,改变因素数值,重新测量;
12.s5、整理确定三种因素的补偿数值,实现高精度宽视场动态三维测量,进行项目总结。
13.作为上述技术方案的进一步描述:
14.所述三维空间测量装置基于正弦光栅的三维面形测量原理进行测量,每行亮度按正弦分布的面结构光投影到理想平面时,反射光的亮度也按出射规律分布。
15.一种三维空间信息采集分析处理装置,包括三维空间测量装置,所述三维空间测
量装置包含有可变光栅模块、成像模块、线阵大视场成像模块、综合处理系统与显示屏,所述可变光栅模块用于调节光栅参数,所述成像模块用于观测待测物的影像数据,所述线阵大视场成像模块用于获取投影了正弦条纹的待测物体图像信息,所述综合处理系统用于处理静态测量数据、动态处理数据与影像数据,所述显示屏用于显示待测物影像与测量数据。
16.作为上述技术方案的进一步描述:
17.所述线阵大视场成像模块的线扫描频率大于14khz,所述线阵大视场成像模块采用多个线阵大视场传感器拼接而成。
18.作为上述技术方案的进一步描述:
19.所述三维空间测量装置上固定安装有激光测距模块,所述激光测距模块用于测量三维空间测量装置和待测物的距离。
20.作为上述技术方案的进一步描述:
21.所述内部综合处理系统包含有图像接收控制模块、数据缓存模块、图像预处理模块、信号整合模块、通信控制模块、srio通信与数据缓存模块、多核dsp与存储模块。
22.作为上述技术方案的进一步描述:
23.所述多核dsp与存储模块及srio通信与数据缓存模块电性连接,所述srio通信与数据缓存模块与图像预处理模块及信号整合模块电性连接,所述信号整合模块还与通信控制模块及数据缓存模块电性连接,所述图像预处理模块还与数据缓存模块电性连接,所述数据缓存模块还与图像接收控制模块及图像预处理模块电性连接,所述数据缓存模块电性连接有ddr2。
24.作为上述技术方案的进一步描述:
25.所述三维空间测量装置上安装有综合接口,所述综合接口用于数据下载和信息交互以及供电,所述综合接口与内部综合处理系统电连接。
26.相比于现有技术,本发明的优点在于:
27.(1)本方案,提出传感器拼接可调光栅投影法及其相应的误差补偿算法,在保持原有精度的同时提高单次测量的采集范围;提出动态标定及误差补偿方法,在保持原有静态测量精度的同时实现动态测量,通过控制可调光栅的控制算法、动态标定及测量误差与传感器拼接参数三种因素的变化,来对比三维空间测量装置在动态测量与静态测量的误差,找到合适的补偿方法,为三维空间测量的动态应用提供理论基础与实验数据。
28.(2)本方案,正弦光栅的三维面形测量的优点准确和快捷以及高数据空间分辨率等,所以,其是结构光投影法以后发展的必然趋势,但是存在两个确定,一是精度与视场之间存在矛盾,即大视场精度低,精度高视场则小,二是目前测量仪器需要固定,不能动态使用,该设备能够针对两个缺点进行针对性设计补偿,以满足动态使用需求。
29.(3)本方案,可变光栅模块根据使用者的实验需求对光栅进行调节转换,可变光栅模块能够在电机的控制下,按相移原理改变相位,当采用四步相移法时,条纹图相位相差π/2,成像模块用来拍摄待测物并通过显示屏进行显示,以方便使用者将三维空间测量装置对准待测物并进行测量,线阵大视场成像模块获取投影参数,从而方便收集对比测量精度,完成实验目的,内部的综合处理系统能够将获取的信息进行处理,求解x,y,z三个方向的尺寸信息,对噪声信号进行滤波处理,同时根据已有研究结果对初始结算数据进行误差补偿,并能够将结果输出或存储,通过显示屏显示待测物与测量参数及数据,方便使用者进行查看。
30.(4)本方案,传感器拼接采用多个线阵大视场成像模块获取投影了正弦条纹的待测物体图像信息,其中线阵大视场成像模块的线扫描频率大于14khz,成像效果等同于采用卷帘门曝光机制的面阵相机,但感光范围明显大于同等价格的面阵相机,多个线阵大视场传感器的拼接,其误差补偿难度小于使用多个面阵传感器。
31.(5)本方案,激光测距模块在配合成像模块的条件下,提醒使用者将设备持在规定的距离范围内,距离和图像信息可以通过显示屏进行观察。
32.(6)本方案,利用图像接收控制模块与通信控制模块分别接收待测物的图像信息与测量数据,利用图像预处理模块整理图像信息并通过srio通信与数据缓存模块传输给多核dsp进行处理,然后传输出去同时对数据保存到存储模块,而数据缓存模块对图像信息进行缓存同时通过信号整合模块对测量数据进行缓存。
33.(7)本方案,多核dsp处理图像接收控制模块与通信控制模块接收到的图像信息与测量信息,并进行处理,ddr2加快缓存处理速度。
34.(8)本方案,综合接口方便使用者进行下载存储数据,以便进行查阅统计,同时能够与三维空间测量装置进行交互使用,并进行供电。
附图说明
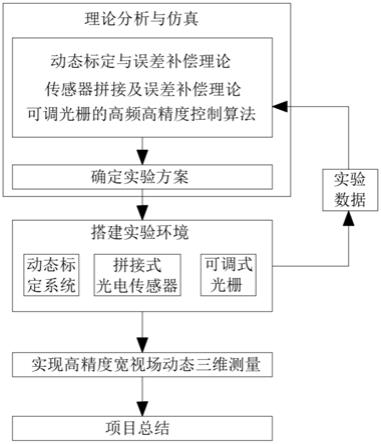
35.图1为本发明的工作流程;
36.图2为本发明基于正弦光栅的三维面形测量原理图;
37.图3为本发明的结构示意图;
38.图4为本发明综合处理系统的原理示意图。
39.图中标号说明:
40.1、可变光栅模块;2、成像模块;3、线阵大视场成像模块;4、综合处理系统;41、图像接收控制模块;42、数据缓存模块;43、图像预处理模块;44、信号整合模块;45、通信控制模块;46、srio通信与数据缓存模块;47、多核dsp;48、存储模块;5、显示屏;6、激光测距模块;7、综合接口。
具体实施方式
41.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述;
42.请参阅图1,本发明中,一种三维空间信息采集分析处理的方法,包括以下步骤:
43.s1、三维空间测量装置对待测物进行测量,获得静态测量数据;
44.s2、采用精准的机械移动来构成三维空间测量装置的动态测量条件,并实时高精度测距作为动态测量的参数,三维空间测量装置测量动态状态下待测物进行动态测量;
45.s3、其中可调光栅的控制算法、动态标定及测量误差与传感器拼接参数三种因素作为变量,改变一种以上的因素,将实现动态三维测量获得动态测量数据;
46.s4、对比动态测量数据与静态测量数据,当两者测量精准度误差处于预期数值时证明误差补偿确定,若两者测量精准度误差过大不处于预期数值时证明补偿失败,改变因素数值,重新测量;
47.s5、整理确定三种因素的补偿数值,实现高精度宽视场动态三维测量,进行项目总
结。
48.本发明中,提出传感器拼接可调光栅投影法及其相应的误差补偿算法,在保持原有精度的同时提高单次测量的采集范围;提出动态标定及误差补偿方法,在保持原有静态测量精度的同时实现动态测量,通过控制可调光栅的控制算法、动态标定及测量误差与传感器拼接参数三种因素的变化,来对比三维空间测量装置在动态测量与静态测量的误差,找到合适的补偿方法,为三维空间测量的动态应用提供理论基础与实验数据。
49.请参阅图2,其中:三维空间测量装置基于正弦光栅的三维面形测量原理进行测量,每行亮度按正弦分布的面结构光投影到理想平面时,反射光的亮度也按出射规律分布。
50.本发明中,正弦光栅的三维面形测量的优点准确和快捷以及高数据空间分辨率等,所以,其是结构光投影法以后发展的必然趋势,但是存在两个确定,一是精度与视场之间存在矛盾,即大视场精度低,精度高视场则小,二是目前测量仪器需要固定,不能动态使用,该设备能够针对两个缺点进行针对性设计补偿,以满足动态使用需求。
51.请参阅图3与图4,本发明中,一种三维空间信息采集分析处理装置,包括三维空间测量装置,三维空间测量装置包含有可变光栅模块1、成像模块2、线阵大视场成像模块3、综合处理系统4与显示屏5,可变光栅模块1用于调节光栅参数,成像模块2用于观测待测物的影像数据,线阵大视场成像模块3用于获取投影了正弦条纹的待测物体图像信息,综合处理系统4用于处理静态测量数据、动态处理数据与影像数据,显示屏5用于显示待测物影像与测量数据。
52.本发明中,可变光栅模块1根据使用者的实验需求对光栅进行调节转换,可变光栅模块能够在电机的控制下,按相移原理改变相位,当采用四步相移法时,条纹图相位相差π/2,成像模块2用来拍摄待测物并通过显示屏5进行显示,以方便使用者将三维空间测量装置对准待测物并进行测量,线阵大视场成像模块3获取投影参数,从而方便收集对比测量精度,完成实验目的,内部的综合处理系统4能够将获取的信息进行处理,求解x,y,z三个方向的尺寸信息,对噪声信号进行滤波处理,同时根据已有研究结果对初始结算数据进行误差补偿,并能够将结果输出或存储,通过显示屏5显示待测物与测量参数及数据,方便使用者进行查看。
53.请参阅图3,其中:线阵大视场成像模块3的线扫描频率大于14khz,线阵大视场成像模块3采用多个线阵大视场传感器拼接而成。
54.本发明中,传感器拼接采用多个线阵大视场成像模块3获取投影了正弦条纹的待测物体图像信息,其中线阵大视场成像模块的线扫描频率大于14khz,成像效果等同于采用卷帘门曝光机制的面阵相机,但感光范围明显大于同等价格的面阵相机,多个线阵大视场传感器的拼接,其误差补偿难度小于使用多个面阵传感器。
55.请参阅图3,其中:三维空间测量装置上固定安装有激光测距模块6,激光测距模块6用于测量三维空间测量装置和待测物的距离。
56.本发明中,激光测距模块6在配合成像模块2的条件下,提醒使用者将设备持在规定的距离范围内,距离和图像信息可以通过显示屏5进行观察。
57.请参阅图4,其中:内部综合处理系统4包含有图像接收控制模块41、数据缓存模块42、图像预处理模块43、信号整合模块44、通信控制模块45、srio通信与数据缓存模块46、多核dsp47与存储模块48。
58.本发明中,利用图像接收控制模块41与通信控制模块45分别接收待测物的图像信息与测量数据,利用图像预处理模块43整理图像信息并通过srio通信与数据缓存模块46传输给多核dsp47进行处理,然后传输出去同时对数据保存到存储模块48,而数据缓存模块42对图像信息进行缓存同时通过信号整合模块44对测量数据进行缓存。
59.请参阅图4,其中:多核dsp47与存储模块48及srio通信与数据缓存模块46电性连接,srio通信与数据缓存模块46与图像预处理模块43及信号整合模块44电性连接,信号整合模块44还与通信控制模块45及数据缓存模块42电性连接,图像预处理模块43还与数据缓存模块42电性连接,数据缓存模块42还与图像接收控制模块41及图像预处理模块43电性连接,数据缓存模块42电性连接有ddr2。
60.本发明中,多核dsp47处理图像接收控制模块41与通信控制模块45接收到的图像信息与测量信息,并进行处理,ddr2加快缓存处理速度。
61.请参阅图3,其中:三维空间测量装置上安装有综合接口7,综合接口7用于数据下载和信息交互以及供电,综合接口7与内部综合处理系统4电连接。
62.本发明中,综合接口7方便使用者进行下载存储数据,以便进行查阅统计,同时能够与三维空间测量装置进行交互使用,并进行供电。
63.工作原理:可变光栅模块1根据使用者的实验需求对光栅进行调节转换,可变光栅模块能够在电机的控制下,按相移原理改变相位,当采用四步相移法时,条纹图相位相差π/2,成像模块2用来拍摄待测物并通过显示屏5进行显示,以方便使用者将三维空间测量装置对准待测物并进行测量,线阵大视场成像模块3获取投影参数,从而方便收集对比测量精度,完成实验目的,内部的综合处理系统4能够将获取的信息进行处理,求解x,y,z三个方向的尺寸信息,对噪声信号进行滤波处理,同时根据已有研究结果对初始结算数据进行误差补偿,并能够将结果输出或存储,通过显示屏5显示待测物与测量参数及数据,方便使用者进行查看,提出传感器拼接可调光栅投影法及其相应的误差补偿算法,在保持原有精度的同时提高单次测量的采集范围;提出动态标定及误差补偿方法,在保持原有静态测量精度的同时实现动态测量,通过控制可调光栅的控制算法、动态标定及测量误差与传感器拼接参数三种因素的变化,来对比三维空间测量装置在动态测量与静态测量的误差,找到合适的补偿方法,为三维空间测量的动态应用提供理论基础与实验数据,确立面结构光三维测量的动态标定及其误差补偿方法,为测量方法的动态应用奠定理论基础;找到传感器拼接的误差补偿方法,扩大系统单次感光范围,为保证精度前提下的快速大范围测量提供条件;实现对可调式光栅投影的精确控制,与高精度大视场光电信号采集方法相结合,从而实现大视场高精度的三维测量。
64.以上所述,仅为本发明较佳的具体实施方式;但本发明的保护范围并不局限于此。任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其改进构思加以等同替换或改变,都应涵盖在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1