数据驱动型的高精度锂电池SOC联合估计方法及系统与流程
数据驱动型的高精度锂电池soc联合估计方法及系统
技术领域
1.本发明涉及锂电池的soc估计技术领域,具体地涉及一种数据驱动型的高精度锂电池soc联合估计方法及系统。
背景技术:
2.目前针对动力电池模型的大量研究,电化学模型能够深入描述动力锂电池内部的微观化学反应,但因涉及到的参数个数众多使得模型复杂度过高,等效电路模型模型参数辨识简单,更适合用于在线实时估计,但缺乏对电池内部微观反应的电化学解释,并且锂电池本身的自然衰减和循环衰减特性使得模型参数发生变化,从而导致电化学动力电池建模精度不足、模型适应范围小和参数存在不确定性,而这些对锂电池荷电状态(state of charge,soc)估计精度产生较大影响。近些年,基于数据驱动型的学习算法广泛运用于锂电池soc估计中,而锂离子电池作为典型的非线性复杂系统,其内部复杂的化学反应过程以及不确定的外部环境,采用输入输出数据间的非线性关系来训练电池模型以及刻画电池动态特性方面上具有一定的优势,但其所构建模型的准确性直接决定了锂电池soc估计精度。
技术实现要素:
3.本发明实施方式的目的是提供一种数据驱动型的高精度锂电池soc联合估计方法及系统,该方法和系统能够精确估计锂电池的soc值。
4.为了实现上述目的,本发明实施方式提供一种数据驱动型的高精度锂电池soc联合估计方法,所述方法包括:
5.构建初始的svm模型;
6.采用pso方法确定所述svm模型的惩罚因子;
7.根据所述惩罚因子更新所述svm模型;
8.训练并测试所述svm模型以确定所述svm模型估计soc的精度;
9.判断所述精度是否小于预设的阈值;
10.在判断所述精度大于或等于所述阈值的情况下,再次采用pso方法确定所述svm的惩罚因子,并执行所述方法的相应步骤,直到判断所述精度小于所述阈值;以及
11.在判断所述精度小于所述阈值的情况下,输出所述svm模型,并采用所述svm模型对soc值进行估计。
12.可选地,所述采用pso方法确定所述svm模型的惩罚因子包括:
13.采用pso算法确定所述svm模型的核参数;
14.所述根据所述惩罚因子更新所述svm模型包括:
15.根据所述惩罚因子和所述核参数更新所述svm模型。
16.可选地,所述pso方法包括:
17.初始化各个粒子群的每个粒子;
18.计算每个粒子的适应度;
19.更新每个粒子以及对应的位置和速度;
20.判断当前是否满足算法的退出条件;
21.在判断满足算法的退出条件的情况下,输出最优的粒子;
22.在判断不满足算法的退出条件的情况下,再次计算每个粒子的适应度并执行所述方法的相应步骤,直到判断满足算法的退出条件。
23.可选地,所述初始化各个粒子群的每个粒子具包括:
24.采用预设长度的二进制符号串编码所述粒子,采用数字0或1表示每个所述粒子的基因值。
25.可选地,所述更新每个粒子以及对应的位置和速度包括:
26.根据公式(1)更新所述速度,
27.v
k+1
=ωv
k
+c1r1(p
b
‑
x
k
)+c2r2(g
b
‑
x
k
),
ꢀꢀ
(1)
28.其中,v
k+1
为更新后的速度,ω为惯性权重,v
k
为更新前的速度,c1、c2为加速常数,r1、r2为加速度权重系数,p
b
为个体最优解,g
b
为全局最优解,x
k
为所述粒子当前的位置。
29.可选地,所述更新每个粒子以及对应的位置和速度包括:
30.根据公式(2)更所述位置,
31.x
k+1
=x
k
+v
k
,
ꢀꢀ
(2)
32.其中,x
k+1
为更新后的所述位置,x
k
为更新前的所述位置,v
k
为所述粒子当前的速度。
33.可选地,所述判断当前是否满足算法的退出条件包括:
34.判断当前的迭代次数是否大于或等于预设的次数阈值;
35.在判断所述迭代次数大于或等于所述次数阈值的情况下,确定满足所述退出条件;
36.在判断所述迭代次数小于所述次数阈值的情况下,确定未满足所述退出条件。
37.可选地,所述计算每个粒子的适应度包括:
38.将所述粒子中的参数加入svm模型中;
39.计算加入后的svm模型的精度以作为所述适应度;
40.所述判断当前是否满足算法的退出条件包括:
41.判断当前最优的粒子的适应度是否小于或等于预设的适应度阈值;
42.在判断当前最优的粒子的适应度小于或等于所述适应度阈值的情况下,确定满足所述退出条件;
43.在判断当前的粒子的适应度大于所述适应度阈值的情况下,确定未满足所述退出条件。
44.另一方面,本发明还提供一种数据驱动型的高精度锂电池soc联合估计系统,所述系统包括处理器,所述处理器用于执行如上述任一所述的方法。
45.再一方面,本发明还提供一种存储介质,所述存储介质存储有指令,所述指令用于被机器读取以使得所述机器执行如上述任一所述的方法。
46.通过上述技术方案,本发明提供的数据驱动型的高精度锂电池soc联合估计方法及系统通过采用pso算法优化svm模型的多个参数,克服了svm模型在直接估计soc值时由于未结合锂电池的不确定特性而导致的估计精度过低的技术缺陷,提高了锂电池soc值的估
计精度。
47.本发明实施方式的其它特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
48.附图是用来提供对本发明实施方式的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本发明实施方式,但并不构成对本发明实施方式的限制。在附图中:
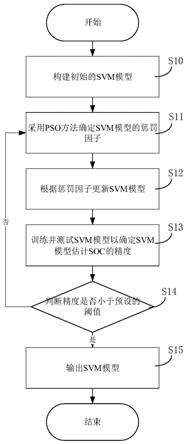
49.图1是根据本发明的一个实施方式的数据驱动型的高精度锂电池soc联合估计方法的流程图;
50.图2是根据本发明的一个实施方式的数据驱动型的高精度锂电池soc联合估计方法的部分流程图;
51.图3是根据本发明的一个实施方式的数据驱动型的高精度锂电池soc联合估计方法的部分流程图;以及
52.图4是根据本发明的一个实施方式的数据驱动型的高精度锂电池soc联合估计方法的部分流程图。
具体实施方式
53.以下结合附图对本发明实施方式的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本发明实施方式,并不用于限制本发明实施方式。
54.在本发明实施方式中,在未作相反说明的情况下,使用的方位词如“上、下、顶、底”通常是针对附图所示的方向而言的或者是针对竖直、垂直或重力方向上而言的各部件相互位置关系描述用词。
55.另外,若本发明实施方式中有涉及“第一”、“第二”等的描述,则该“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施方式之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
56.如图1所示是根据本发明的一个实施方式的数据驱动型的高精度锂电池soc联合估计方法的流程图。在图1中,该方法可以包括:
57.在步骤s10中,构建初始的svm模型;
58.在步骤s11中,采用pso方法确定svm模型的惩罚因子;
59.在步骤s12中,根据惩罚因子更新svm模型;
60.在步骤s13中,训练并测试svm模型以确定svm模型估计soc的精度;
61.在步骤s14中,判断精度是否小于预设的阈值;
62.在判断精度大于或等于阈值的情况下,再次采用pso方法确定svm的惩罚因子(即返回执行步骤s11),并执行该方法的相应步骤,直到判断精度小于阈值;
63.在步骤s15中,在判断精度小于阈值的情况下,输出svm模型,并采用svm模型对soc
值进行估计。
64.在该图1所示出的方法中,采用初始的svm模型直接进行训练和测试显然不能够满足高精度估计soc的要求,同时由于惩罚因子和核参数在初始阶段的数值常常是默认值,这使得在训练svm模型的过程中会导致训练迭代次数大大增加。因此,在步骤s11中,发明人首先采用pso算法对惩罚因子进行确定,降低了svm模型后续训练和测试的难度,从而提高了算法的效率。在步骤s14判断svm模型的精度已经小于预设的阈值的情况下,此时说明该svm模型的精度已经能够满足要求,因此可以直接使用该svm模型对soc值进行估计。
65.进一步地,在如图1所示出的方法中,发明人采用pso算法确定惩罚因子能够实现svm模型训练和测试中迭代次数的降低。那么类似地,也可以采用该pso算法确定svm模型的核参数,即如图2所示出的方法。并且相较于图1中示出的方法而言,由于图2所示出的方法同时确定出了核参数和惩罚因子,这使得svm模型在训练前就能够得到较好的初始值,这样就更进一步地降低了训练和测试的迭代次数。具体地,在图2中,该方法可以包括:
66.在步骤s20中,构建初始的svm模型;
67.在步骤s21中,采用pso方法确定svm模型的惩罚因子和核参数;
68.在步骤s22中,根据惩罚因子更新svm模型和核参数;
69.在步骤s23中,训练并测试svm模型以确定svm模型估计soc的精度;
70.在步骤s24中,判断精度是否小于预设的阈值;
71.在判断精度大于或等于阈值的情况下,再次采用pso方法确定svm的惩罚因子(即返回执行步骤s21),并执行该方法的相应步骤,直到判断精度小于阈值;
72.在步骤s25中,在判断精度小于阈值的情况下,输出svm模型,并采用svm模型对soc值进行估计。
73.此外,在该实施方式中,对于该pso算法,则可以是本领域人员所知的方法。但是,在本发明的一个优选示例中,该pso算法也可以包括如图3所示的步骤。在图3中,该pso算法可以包括:
74.在步骤s30中,初始化各个粒子群的每个粒子。其中,初始化每个粒子的过程可以是本领域人员所知的多种方法,但是在本发明的一个优选示例中,考虑到后续更新的过程,为了降低在更新过程中的计算量,可以是采用预设长度的二进制符号串编码粒子,采用数字0或1表示每个粒子的基因值。
75.在步骤s31中,计算每个粒子的适应度。其中,该适应度的计算方法可以是本领域人员所知的多种方法。但是,考虑到适应度的大小直接决定了所确定的惩罚因子/核参数是否能够给到svm模型一个良好的初始值,因此在本发明的一个优选示例中,计算适应度的方法可以是先将粒子中的参数加入svm模型中,然后再计算加入后的svm模型的精度以作为适应度。
76.在步骤s32中,更新每个粒子以及对应的位置和速度。其中,对位置和速度进行更新的方法可以是本领域人员是所知的多种方式。在本发明的一个优选示例中,可以是采用公式(1)和公式(2)来更新该位置和速度,
77.v
k+1
=ωv
k
+c1r1(p
b
‑
x
k
)+c2r2(g
b
‑
x
k
),
ꢀꢀ
(1)
78.其中,v
k+1
为更新后的速度,ω为惯性权重,v
k
为更新前的速度,c1、c2为加速常数,r1、r2为加速度权重系数,p
b
为个体最优解,g
b
为全局最优解,x
k
为粒子当前的位置;
79.x
k+1
=x
k
+v
k
,
ꢀꢀ
(2)
80.其中,x
k+1
为更新后的位置,x
k
为更新前的位置,v
k
为粒子当前的速度。
81.在步骤s33中,判断当前是否满足算法的退出条件。其中,该退出条件可以是本领域人员所知的多种方式。在本发明的一个示例中,该退出条件可以是直接判断当前的迭代次数是否大于或等于预设的次数阈值;在判断迭代次数大于或等于次数阈值的情况下,确定满足退出条件;在判断迭代次数小于次数阈值的情况下,确定未满足退出条件。这样的方法同时也能够避免算法在无法获得最优解的情况下,长时间地执行。在本发明的另一个示例中,该退出条件也可以是判断当前最优的粒子的适应度是否小于或等于预设的适应度阈值;在判断当前最优的粒子的适应度小于或等于适应度阈值的情况下,确定满足退出条件;在判断当前的粒子的适应度大于适应度阈值的情况下,确定未满足退出条件。相较于前者而言,该方法可以保证得到的粒子精确度更高。在本发明的再一个示例中,发明人考虑到算法既需要避免出现陷入无法得到最优解的死循环缺陷,也需要保证得到的精确度在一个较为准确的范围。因此可以直接将前两者相结合。具体地,该退出条件可以包括如图4所示出的步骤:
82.在步骤s40中,判断当前最优的粒子的适应度是否小于或等于预设的适应度阈值;
83.在步骤s41中,在判断当前最优的粒子的适应度是否大于预设的适应度阈值的情况下,判断当前的迭代次数是否大于或等于预设的次数阈值;
84.在步骤s42中,在判断当前最优的粒子的适应度小于或等于预设的适应度阈值和/或判断当前的迭代次数大于或等于预设的次数阈值的情况下,确定满足退出条件;
85.在步骤s43中,在判断当前的迭代次数小于预设的次数阈值的情况下,确定未满足退出条件。
86.在步骤s34中,在判断满足算法的退出条件的情况下,输出最优的粒子。
87.在判断不满足算法的退出条件的情况下,再次计算每个粒子的适应度并执行该方法的相应步骤(即返回执行步骤s31),直到判断满足算法的退出条件。
88.另一方面,本发明还提供一种数据驱动型的高精度锂电池soc联合估计系统,所述系统包括处理器,所述处理器用于执行如上述任一所述的方法。
89.再一方面,本发明还提供一种存储介质,所述存储介质存储有指令,所述指令用于被机器读取以使得所述机器执行如上述任一所述的方法。
90.通过上述技术方案,本发明提供的数据驱动型的高精度锂电池soc联合估计方法及系统通过采用pso算法优化svm模型的多个参数,克服了svm模型在直接估计soc值时由于未结合锂电池的不确定特性而导致的估计精度过低的技术缺陷,提高了锂电池soc值的估计精度。
91.以上结合附图详细描述了本发明例的可选实施方式,但是,本发明实施方式并不限于上述实施方式中的具体细节,在本发明实施方式的技术构思范围内,可以对本发明实施方式的技术方案进行多种简单变型,这些简单变型均属于本发明实施方式的保护范围。
92.另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合。为了避免不必要的重复,本发明实施方式对各种可能的组合方式不再另行说明。
93.本领域技术人员可以理解实现上述实施方式方法中的全部或部分步骤是可以通
过程序来指令相关的硬件来完成,该程序存储在一个存储介质中,包括若干指令用以使得一个可以是单片机,芯片等或处理器(processor)执行本技术各个实施方式所述方法的全部或部分步骤。而前述的存储介质包括:u盘、移动硬盘、只读存储器(rom,read
‑
only memory)、随机存取存储器(ram,random access memory)、磁碟或者光盘等各种可以存储程序代码的介质。
94.此外,本发明实施方式的各种不同的实施方式之间也可以进行任意组合,只要其不违背本发明实施方式的思想,其同样应当视为本发明实施方式所公开的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1