一种水利用冬季采样机器人的制作方法
1.本发明涉及水利技术领域,具体为一种水利用冬季采样机器人。
背景技术:
2.水是一切生命的源泉,是人类生活和生产活动中必不可少的物质,在人类社会的生存和发展中,需要不断地适应、利用、改造和保护水环境,水利事业随着社会生产力的发展而不断发展,并成为人类社会文明和经济发展的重要支柱,原始社会生产力低下,人类没有改变自然环境的能力,人们逐水草而居,择丘陵而处,靠渔猎、采集和游牧为生,对自然界的水只能趋利避害,消极适应,进入奴隶社会和封建社会后,随着铁器工具的发展,人们在江河两岸发展农业,建设村庄和城镇,遂产生了防洪、排涝、灌溉、航运和城镇供水的需要,从而开创和发展了水利事业,地球上的水量是丰富的,但是淡水量仅占2.5%,而参与全球水循环的动态水量又仅为淡水量的1.6%,约为577万亿立方米,其中降落在陆地上以径流为主要形式的水量,多年平均为47万亿立方米,这部分水量逐年循环再生,是人类开发利用的主要对象,然而这部分水量中约有三分之二是以暴雨和洪水形式出现,不仅难以大量利用,且常带来严重的水灾;
3.现有技术领域内,北方冬季寒冷造成湖面冰封,导致工作人员对水体取样困难,需要工作人员手动钻破冰层进行取样,操作较为麻烦,并且工作人员冰面作业较为危险,操作不当容易导致工具沉入冰层下,难以取回。
技术实现要素:
4.本发明的目的在于提供一种水利用冬季采样机器人,以至少解决现有技术的北方冬季寒冷造成湖面冰封,导致工作人员对水体取样困难,需要工作人员手动钻破冰层进行取样,操作较为麻烦,并且工作人员冰面作业较为危险,操作不当容易导致工具沉入冰层下,难以取回的问题。
5.为实现上述目的,本发明提供如下技术方案:一种水利用冬季采样机器人,包括:
6.外壳;
7.移动装置,所述移动装置的数量为两个,两个所述移动装置分别安装在外壳的左右两侧;
8.浮力机构,所述浮力机构的数量为两个,两个所述浮力机构分别沿左右方向安装在外壳的前后两侧;
9.存储机构,设置在所述外壳的呢强左侧;
10.钻孔机构,安装在所述外壳的顶端;
11.网络控制器,设置在所述外壳的顶端左侧,所述网络控制器与移动装置电性连接;
12.摄像头,设置在所述网络控制器的顶端,所述摄像头与网络控制器电性连接。
13.优选的,所述浮力机构包括;浮力机构安装架、电动伸缩杆、第一连杆、第二连杆、限位杆和浮筒;浮力机构安装架设置在所述外壳的侧壁中心位置;电动伸缩杆沿上下方向
通过销轴转动连接在所述浮力机构安装架的右侧顶端后侧,所述电动伸缩杆和网络控制器电性连接;第一连杆沿前后方向通过销轴转动连接在所述浮力机构安装架的右侧底端,所述第一连杆的内端与电动伸缩杆的底端通过销轴转动连接;第二连杆沿前后方向通过销轴转动连接在所述第一连杆的外端;限位杆沿前后方向通过销轴转动连接在所述浮力机构安装架的右侧顶端前侧,所述限位杆的右侧前端与第二连杆的外端通过销轴转动连接;浮筒沿左右方向设置在所述限位杆的外侧。
14.优选的,所述存储机构包括:底座、顶盖、托架、存储罐、第二电机和电磁阀;底座安装在所述外壳的内腔左侧底端;顶盖设置在所述外壳的内腔且位于底座的上方;托架通过销轴转动连接在所述底座的顶端中心位置;所述存储罐的数量为若干个,若干个所述存储罐沿周向可拆卸的安装在托架的外侧卡槽内,所述顶盖的下表面与存储罐的顶端相接触;第二电机设置在所述底座的底端,所述第二电机的输出端延伸出底座的上表面并与托架轴心螺钉连接,所述第二电机与网络控制器电性连接;电磁阀安装在所述顶盖的右侧开口处,所述电磁阀与网络控制器电性连接。
15.优选的,所述钻孔机构包括;钻孔机构安装座、固定板、皮带轮、传动皮带、张紧轮和第三电机;钻孔机构安装座设置在所述外壳的顶端;固定板沿上下方向设置在所述钻孔机构安装座的顶端左侧;所述皮带轮的数量为三个,三个所述皮带轮呈三角形分别通过销轴转动连接在固定板前后两侧;传动皮带套接在三个所述皮带轮的外壁;张紧轮通过销轴转动连接在所述固定板的后侧底端,所述张紧轮的外壁与传动皮带的外壁相接触;第三电机设置在所述固定板的前侧顶端,所述第三电机的输出端与前侧顶端皮带轮螺钉连接,所述第三电机与网络控制器电性连接。
16.优选的,所述钻孔机构还包括;第一导轨、第一限位滑块、第二导轨和第二限位块;第一导轨沿上下方向设置在所述钻孔机构安装座的顶端右侧;第一限位滑块插接在所述第一导轨的内腔;第二导轨沿前后方向设置在所述第一限位滑块的左侧;第二限位块插接在所述第二导轨的内腔,所述第二限位块的左侧与传动皮带的右端螺钉连接。
17.优选的,所述钻孔机构还包括;第四电机、钻杆和筒体;第四电机通过支架设置在所述第一限位滑块的右侧,所述第四电机和网络控制器电性连接;钻杆沿上下方向螺钉连接在所述第四电机的输出端;筒体沿上下方向设置在所述外壳的内腔右侧并套接在钻杆的外侧,所述筒体的上下两侧分别延伸出外壳的外侧,所述筒体的内腔左侧顶端开设有通孔槽。
18.优选的,所述外壳还包括:水泵、电动水管轮和水管水泵通过支架安装在所述外壳的右侧顶端,所述水泵的出水口螺接有导管的一端,且导管的另一端延伸进外壳的内腔并与电磁阀的进水口相螺接,所述水泵和网络控制器电性连接;电动水管轮设置在所述水泵的左侧,所述电动水管轮的出水口与水泵进水管相螺接,所述电动水管轮与网络控制器电性连接;水管缠绕在所述电动水管轮的外侧,所述水管的一端与电动水管轮的进水口相螺接,且水管的另一端延伸出外壳的下表面。
19.与现有技术相比,本发明的有益效果是:该水利用冬季采样机器人:
20.1、通过第三电机驱动对应位置上的皮带轮转动,进而使传动皮带驱动第二限位块周向移动,第二限位块在第二导轨内腔前后往复运动,并驱动第一限位滑块在第四电机配合下驱动钻杆在筒体上下往复运动,第四电机上下运动过程中驱动钻杆转动,进而在钻杆
旋转力的作用下将冰层破开;
21.2、通过电动水管轮内部电机驱动轮盘转动以将水管由冰层钻孔处放入,水泵将水样排入至电磁阀内,第二电机驱动托架带动存储罐依次转动至电磁阀下方,电磁阀通过控制自身阀门开启关闭将水样依次倒入存储罐内,进而完成采样作业;
22.3、通过电动伸缩杆自身伸长,以推动第一连杆内端向下运动,进而使第一连杆以与浮力机构安装架销轴转动连接处为顶点向内侧转动,并使第一连杆在第二连杆的配合下带动限位杆以与浮力机构安装架销轴转动连接处为顶点向内侧转动,进而使第一连杆与第二连杆夹角变小同时向内侧折叠,进而使限位杆驱动浮筒向下转动以与外部水面接触,并在浮筒的浮力作用下,使装置悬浮在水面表面等待救援,避免直接沉入水中;
23.从而可远程对冰封的湖面进行自动钻孔取样,无需工作人员手动钻孔,避免发生危险,减少工作人员手动操作项,操作简单,省时省力,并且冰面坍塌时,可悬浮在水面,避免沉入冰层下方,难以回收。
附图说明
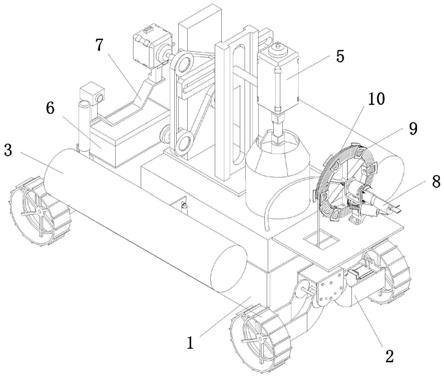
24.图1为本发明的结构示意图;
25.图2为图1的外壳爆炸图;
26.图3为图1的浮力机构图;
27.图4为图1的钻孔机构图。
28.图中:1、外壳,2、移动装置,3、浮力机构,31、浮力机构安装架,32、电动伸缩杆,33、第一连杆,34、第二连杆,35、限位杆,36、浮筒,4、存储机构,41、底座,42、顶盖,43、托架,44、存储罐,45、第二电机,46、电磁阀,5、钻孔机构,51、钻孔机构安装座,52、固定板,53、皮带轮,54、张紧轮,55、传动皮带,56、第三电机,57、第一导轨,58、第一限位滑块,59、第二导轨,510、第四电机,511、钻杆,512、筒体,513、第二限位块,6、网络控制器,7、摄像头,8、水泵,9、电动水管轮,10、水管。
具体实施方式
29.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
30.请参阅图1
‑
4,本发明提供一种技术方案:一种水利用冬季采样机器人,包括:外壳1、移动装置2、浮力机构3、存储机构4、钻孔机构5、网络控制器6和摄像头7,外壳1、移动装置2、浮力机构3、存储机构4、钻孔机构5、网络控制器6和摄像头7采用轻质防水材质制成且内部做密封防水处理;移动装置2的数量为两个,两个移动装置2分别安装在外壳1的左右两侧,移动装置2具体使用型号根据实际使用要求直接从市场上购买安装并使用的,移动装置2可由网络控制器6进行控制以在外壳1的配合下驱动装置正常移动;浮力机构3的数量为两个,两个浮力机构3分别沿左右方向安装在外壳1的前后两侧;存储机构4设置在外壳1的呢强左侧;钻孔机构5安装在外壳1的顶端;网络控制器6设置在外壳1的顶端左侧,网络控制器6与移动装置2电性连接,网络控制器6具体使用型号根据实际使用要求直接从市场上购买
安装并使用的,网络控制器6内部设置有网络模块可由工作人员远程控制提高安全性;摄像头7设置在网络控制器6的顶端,摄像头7与网络控制器6电性连接,摄像头7具体使用型号根据实际使用要求直接从市场上购买安装并使用的,摄像头7可由网络控制器6进行控制以在行进过程中以对外部环境进行观察。
31.作为优选方案,更进一步的,浮力机构3包括;浮力机构安装架31、电动伸缩杆32、第一连杆33、第二连杆34、限位杆35和浮筒36;浮力机构安装架31设置在外壳1的侧壁中心位置;电动伸缩杆32沿上下方向通过销轴转动连接在浮力机构安装架31的右侧顶端后侧,电动伸缩杆32和网络控制器6电性连接,电动伸缩杆32具体使用型号根据实际使用要求直接从市场上购买安装并使用的,电动伸缩杆32可由网络控制器6进行控制自身伸长缩短;第一连杆33沿前后方向通过销轴转动连接在浮力机构安装架31的右侧底端,第一连杆33的内端与电动伸缩杆32的底端通过销轴转动连接,第一连杆33以与浮力机构安装架31销轴转动连接处为顶点向内侧或向外侧转动;第二连杆34沿前后方向通过销轴转动连接在第一连杆33的外端;限位杆35沿前后方向通过销轴转动连接在浮力机构安装架31的右侧顶端前侧,限位杆35的右侧前端与第二连杆34的外端通过销轴转动连接,限位杆35可以与浮力机构安装架31销轴转动连接处为顶点向内侧或向外侧转动;浮筒36沿左右方向设置在限位杆35的外侧。
32.作为优选方案,更进一步的,存储机构4包括:底座41、顶盖42、托架43、存储罐44、第二电机45和电磁阀46;底座41安装在外壳1的内腔左侧底端;顶盖42设置在外壳1的内腔且位于底座41的上方;托架43通过销轴转动连接在底座41的顶端中心位置;存储罐44的数量为若干个,若干个存储罐44沿周向可拆卸的安装在托架43的外侧卡槽内,顶盖42的下表面与存储罐44的顶端相接触,顶盖42起到对存储罐44的密封作用;第二电机45设置在底座41的底端,第二电机45的输出端延伸出底座41的上表面并与托架43轴心螺钉连接,第二电机45与网络控制器6电性连接,第二电机45具体使用型号根据实际使用要求直接从市场上购买安装并使用的,第二电机45可由网络控制器6进行控制驱动托架43顺时针方向转动;电磁阀46安装在顶盖42的右侧开口处,电磁阀46与网络控制器6电性连接,电磁阀46具体使用型号根据实际使用要求直接从市场上购买安装并使用的,电磁阀46可由网络控制器6进行控制通过控制自身阀门开启关闭将水样依次倒入存储罐44内。
33.作为优选方案,更进一步的,钻孔机构5包括;钻孔机构安装座51、固定板52、皮带轮53、传动皮带55、张紧轮54和第三电机56;钻孔机构安装座51设置在外壳1的顶端;固定板52沿上下方向设置在钻孔机构安装座51的顶端左侧;皮带轮53的数量为三个,三个皮带轮53呈三角形分别通过销轴转动连接在固定板52前后两侧;传动皮带55套接在三个皮带轮53的外壁;张紧轮54通过销轴转动连接在固定板52的后侧底端,张紧轮54的外壁与传动皮带55的外壁相接触,张紧轮54起到对传动皮带55的张紧作用;第三电机56设置在固定板52的前侧顶端,第三电机56的输出端与前侧顶端皮带轮53螺钉连接,第三电机56与网络控制器6电性连接,第三电机56具体使用型号根据实际使用要求直接从市场上购买安装并使用的,第三电机56可由网络控制器6进行控制驱动对应位置上的皮带轮53顺时针方向转动。
34.作为优选方案,更进一步的,钻孔机构5还包括;第一导轨57、第一限位滑块58、第二导轨59和第二限位块513;第一导轨57沿上下方向设置在钻孔机构安装座51的顶端右侧,第一限位滑块58可在第一导轨57的内腔上下移动;第一限位滑块58插接在第一导轨57的内
腔;第二导轨59沿前后方向设置在第一限位滑块58的左侧;第二限位块513插接在第二导轨59的内腔,第二限位块513的左侧与传动皮带55的右端螺钉连接,第二限位块513可在第二导轨59的内腔前后移动。
35.作为优选方案,更进一步的,钻孔机构5还包括;第四电机510、钻杆511和筒体512;第四电机510通过支架设置在第一限位滑块58的右侧,第四电机510和网络控制器6电性连接,第四电机510具体使用型号根据实际使用要求直接从市场上购买安装并使用的,第四电机510可由网络控制器6进行控制驱动钻杆511转动;钻杆511沿上下方向螺钉连接在第四电机510的输出端,钻杆511的外壁顶端设置有螺旋叶片可使钻孔过程中冰屑由筒体512的内腔左侧通孔槽排出;筒体512沿上下方向设置在外壳1的内腔右侧并套接在钻杆511的外侧,筒体512的上下两侧分别延伸出外壳1的外侧,筒体512的内腔左侧顶端开设有通孔槽。
36.作为优选方案,更进一步的,外壳1还包括:水泵8、电动水管轮9和水管10水泵8通过支架安装在所述外壳1的右侧顶端,水泵8的出水口螺接有导管的一端,且导管的另一端延伸进外壳1的内腔并与电磁阀46的进水口相螺接,水泵8和网络控制器6电性连接,水泵8具体使用型号根据实际使用要求直接从市场上购买安装并使用的,水泵8可由网络控制器6进行控制在电动水管轮9和水管10的配合下将水样吸入自身泵室内并由导管排入至电磁阀46内;电动水管轮9设置在水泵8的左侧,电动水管轮9的出水口与水泵8进水管相螺接,电动水管轮9与网络控制器6电性连接,电动水管轮9具体使用型号根据实际使用要求直接从市场上购买安装并使用的,电动水管轮9可由网络控制器6进行控制内部电机驱动轮盘转动,以将缠绕在自身外部的水管10向下由冰层钻孔处放入;水管10缠绕在电动水管轮9的外侧,水管10的一端与电动水管轮9的进水口相螺接,且水管10的另一端延伸出外壳1的下表面。
37.通过本领域人员,可将本案中所有电气件与外部适配的电源通过导线进行连接,并且应该根据具体实际使用情况,选择相适配的外部控制器进行连接,以满足对所有电器件的控制需求,其具体连接方式以及控制顺序,应参考下述工作原理中,各电气件之间先后工作顺序完成电性连接,其详细连接手段,为本领域公知技术,不在进行说明,下述主要介绍工作原理以及过程,具体工作如下。
38.步骤1:工作人员远程控制网络控制器6启动摄像头7以对外部环境进行观察,并控制移动装置2以在外壳1的配合下驱动装置正常移动,在到达指定取样位置时,工作人员控制网络控制器6依次启动第三电机56和第四电机510启动,第三电机56驱动对应位置上的皮带轮53顺时针方向转动,进而使传动皮带55在其他位置上的皮带轮53的限位作用下和在张紧轮54的张紧作用下顺时针方向转动,并使传动皮带55驱动第二限位块513顺时针周向移动,由于第二限位块513与第二导轨59内腔插接,促使第二限位块513周向运动过程中,在第二导轨59内腔前后往复运动,并使第二限位块513在第二导轨59的配合下驱动第一限位滑块58移动,进而在第一导轨57的限位作用下,第一限位滑块58在第四电机510配合下驱动钻杆511在筒体512上下往复运动,第四电机510上下运动过程中驱动钻杆511转动,进而在钻杆511旋转力的作用下将冰层破开;
39.步骤2:工作人员控制网络控制器6依次启动电动水管轮9、水泵8、电磁阀46和第二电机45,电动水管轮9内部电机驱动轮盘转动,以将缠绕在自身外部的水管10向下由冰层钻孔处放入,水泵8在电动水管轮9和水管10的配合下将水样吸入自身泵室内,并由导管排入至电磁阀46内,第二电机45驱动托架43顺时针方向转动,进而使托架43驱动存储罐44依次
转动至电磁阀46下方,电磁阀46通过控制自身阀门开启关闭将水样依次倒入存储罐44内,进而完成采样作业;
40.步骤3:当冰层表面突然破裂,工作人员控制网络控制器6启动前后两个浮力机构3内的电动伸缩杆32,电动伸缩杆32通过自身伸长,以推动第一连杆33内端向下运动,进而使第一连杆33以与浮力机构安装架31销轴转动连接处为顶点向内侧转动,并使第一连杆33在第二连杆34的配合下带动限位杆35以与浮力机构安装架31销轴转动连接处为顶点向内侧转动,进而使第一连杆33与第二连杆34夹角变小同时向内侧折叠,进而使限位杆35驱动浮筒36向下转动以与外部水面接触,并在浮筒36的浮力作用下,使装置悬浮在水面表面等待救援,避免直接沉入水中;
41.从而可远程对冰封的湖面进行自动钻孔取样,无需工作人员手动钻孔,避免发生危险,减少工作人员手动操作项,操作简单,省时省力,并且冰面坍塌时,可悬浮在水面,避免沉入冰层下方,难以回收。
42.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1