一种基于超声导波的岸桥前拉杆接头损伤监测与定位方法与流程
1.本发明涉及一种基于超声导波的岸桥前拉杆接头损伤监测与定位方法,属于结构健康监测领域,可用于对岸边集装箱起重机前拉杆接头进行实时监测,实现对监测区域缺陷的监测与定位。
背景技术:
2.世界经济全球化促进了国际贸易的迅速发展,据统计90%以上的国际贸易量是通过水路运输完成的,而集装箱运输已成为海洋运输的主力。随着集装箱吞吐量的不断增长,岸边集装箱起重机(简称岸桥)正朝着高速化和大型化方向发展。岸桥的前拉杆对大梁起支撑作用,直接影响着岸桥能否正常工作。前拉杆的应力释放孔边缘在循环载荷作用下容易产生微裂纹,由于前拉杆处于高空位置,检查比较困难,一旦细小的裂纹没检查到,就可能日积月累造成延展开裂甚至断裂,造成经济损失和人员伤亡。目前常用的检测手段包括目测、超声检测、渗透检测、磁粉检测等,检测效率较低,且需要在停机状态下进行,检测结果不能对岸桥的运行情况做到实时掌握。超声导波具有传播距离远、衰减小、对缺陷识别能力高等优点,摆脱了常规检测需要逐点扫查的限制,适合在岸桥不停机情况下对前拉杆等不可达区域损伤的实时监测。
3.因此,发展一种基于超声导波的岸桥前拉杆接头损伤监测与定位方法是非常有必要的。
技术实现要素:
4.本发明旨在提供一种基于超声导波的岸桥前拉杆接头损伤监测与定位方法,利用超声导波技术来实现对前拉杆接头上缺陷的监测与定位。提出适合前拉杆接头区域缺陷监测的矩形传感器阵列布设方法,利用传感器阵列单元所采集到的基准信号和损伤信号的差异来判断结构是否存在损伤,信号简单明了,便于分析;进一步采用椭圆定位算法和数据融合方法对缺陷进行重构,从而实现了岸桥前拉杆中缺陷的监测与定位。
5.为实现上述目的,本发明采用如下设计方案:
6.一种基于超声导波的岸桥前拉杆接头损伤监测与定位方法,包括以下步骤;
7.(1)在前拉杆接头区域布设缺陷监测的矩形传感器阵列;
8.(2)利用矩形传感器阵列单元所采集到的基准信号和损伤信号的差异来判断结构是否存在损伤;
9.(3)采用椭圆定位算法和数据融合方法对缺陷进行重构,实现了岸桥前拉杆中缺陷的监测与定位。
10.进一步的,步骤(1)具体的方法为:
11.在岸桥前拉杆接头区域,2n个压电传感器以对称的方式布置在以前拉杆接头应力释放孔中心连线为对称轴的矩形两条对称边上,n≥6;
12.其中一条矩形边上的每个压电传感器t
i
,i=1,
……
n,均作为激励传感器,发出激
励超声导波;
13.另外一条矩形边上的压电传感器t
j
,j=n+1,
……
2n,作为接收传感器,接收来采集信号,依次采集无缺陷时的接收信号即基准信号、有缺陷时接收信号即监测信号,共得到2n2组信号。
14.优选的,所述的激励传感器的激励信号为汉宁窗调制的5周期正弦波信号。
15.进一步的,步骤(2)具体的方法为,在监测过程中:
16.当结构中无缺陷时,激励传感器t
i
激励发的超声导波在板中传播,被接收传感器t
j
接收到,监测信号与基准信号无差异,缺陷散射信号即监测信号与基准信号之差,在波形图中理论上幅值为零;
17.当结构中存在缺陷d时,激励传感器t
i
激励发的超声导波在遇到缺陷d后会发生散射,有一部分散射信号会被接收传感器t
j
接收到,此时的监测信号与基准信号因有缺陷d会存在有差异,缺陷散射信号在波形图中幅值不为零,存在一个缺陷反射回波;通过观察缺陷散射信号即可判断监测对象中是否存在缺陷。
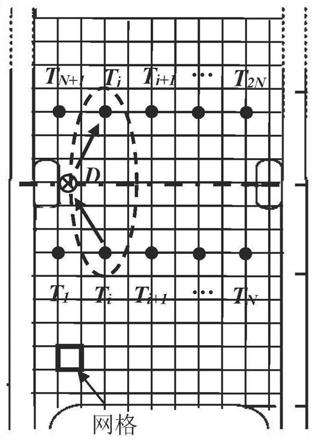
18.步骤(3)中所述的椭圆定位算法,具体的步骤为:
19.从缺陷散射信号中可得到超声导波从第一个激励传感器t1经过缺陷d到第一个接收传感器t2的传播时间t,而超声导波的群速度v
g
根据频散曲线求得,从而求得缺陷d与第一个激励传感器t1、第一个接收传感器t2的距离之和l=v
g
×
t;
20.由椭圆的几何关系知,缺陷d的位置就在以第一个激励传感器t1、第一个接收传感器t2为焦点,以l为长轴的的椭圆上;
21.同理,每组传感器阵列单元均可以确定一条以l为长轴的椭圆轨迹,所有椭圆轨迹的交点即为缺陷d所在位置。
22.步骤(3)中所述的数据融合方法,具体的步骤为:
23.首先,将岸桥前拉杆接头的板结构分割成离散单元,单元数越多,定位精度越高。由几何三角关系知,超声波信号从激励传感器t
i
(x
i
,y
i
)处开始传播至结构中每个离散点(x,y),再次被接收传感器t
j
(x
j
,y
j
)接收的时间t
ij
(x,y)计算如下:
[0024][0025]
其中,i,j是压电传感器的编号,将检测信号t
ij
(x,y)时刻对应的包络幅值s
ij
(t)赋值给板中每个离散点(x,y),得到激励传感器t
i
激励接收传感器t
j
接收时的检测成像结果s
ij
(t
ij
(x,y));
[0026]
传感器阵列个数为2n,将激励传感器t
i
和接收传感器t
j
作为一个阵列单元,则共有2n2个定位单元,通过数据融合的方法将所有定位单元对应的每个离散点处的幅值进行相加,得到板结构缺陷成像结果i(x,y),计算公式如下:
[0027][0028]
本发明采用了以上的技术方案,达到了以下效果:
[0029]
实现了在不停机的情况下对岸桥前拉杆接头区域缺陷的监测与定位,摆脱了常规人工巡检的费时费力,只需一次性安装传感器阵列即可对前拉杆接头进行实时监测,效率高,成本和劳动强度低。
附图说明
[0030]
图1为本发明的椭圆定位原理示意图;
[0031]
图2为实施例的25mm厚腹板的超声导波群速度频散曲线;
[0032]
图3为实施例的传感器阵列传播路径示意图;
[0033]
图4为实施例的传感路径1
‑
9的接收信号;
[0034]
图5为实施例的传感路径1
‑
12的基准信号;
[0035]
图6为实施例的传感路径1
‑
12有缺陷时的监测信号;
[0036]
图7为实施例的传感路径1
‑
12缺陷散射信号;
[0037]
图8为实施例的路径1
‑
12单元椭圆定位结果;
[0038]
图9为实施例的椭圆定位结果;
[0039]
图10为实施例中计算的与真实的贯穿裂纹成像对比图。
具体实施方式
[0040]
下面结合附图和实施例对本发明作进一步说明,且以下实施例只是描述性的不是限定性的,不能以此来限定本发明的保护范围。
[0041]
本发明旨在提供一种基于超声导波的岸桥前拉杆接头损伤监测与定位方法,利用超声导波技术来实现对前拉杆接头上缺陷的监测与定位。提出适合前拉杆接头区域缺陷监测的矩形传感器阵列布设方法,利用传感器阵列单元所采集到的基准信号和损伤信号的差异来判断结构是否存在损伤,信号简单明了,便于分析;进一步采用如图1所示的椭圆定位算法和数据融合方法对缺陷进行重构,从而实现了岸桥前拉杆中缺陷的监测与定位。所述方法通过如下步骤具体实现:
[0042]
图2为前拉杆接头区域缺陷监测系统示意图,包括工业计算机,自主研发的64通道信号激励接收仪,压电传感器阵列(pzt),监测对象前拉杆。监测对象前拉杆呈h型结构,由中间的腹板和两侧的翼缘板组成,材质为q235,腹板厚度为25mm。图3给出了监测对象25mm厚腹板的超声导波群速度频散曲线。传感器选用直径为12mm、厚度为0.48mm的圆形压电陶瓷(pzt),共设置16个压电传感器单元组成稀疏传感器阵列,编号为1
‑
16,传感器布置如图2所示。由于试验对象为一台在役起重机,无法采用刻槽或打孔等破坏性方式进行模拟损伤,因此试验采用ab胶将直径为10mm的不锈钢钢柱粘接在应力释放孔边缘表面,作为模拟缺陷。激励信号为中心频率150khz的经汉宁窗调制的5周期正弦波。
[0043]
首先进行基准信号采集,传感器传播路径如图4所示,传感器t
i
(i=1,
……
8)作为激励,传感器t
j
(j=i+1,i+2,
……
16)作为接收来采集信号,共采集64组基准信号。然后在前拉杆左侧应力释放孔边缘粘贴直径为10mm的不锈钢钢柱作为模拟缺陷,与基准信号采集方式相同,再采集64组监测信号。
[0044]
为了避免复杂的模态分析,本次试验利用速度最快的模态进行进行数据处理,因此只需计算第1个直达波包的波速即可。以1号传感器激励,9号传感器接收,记为1
‑
9,激励
频率150khz时的基准信号为例进行波速计算。图4为1
‑
9的接收信号,从图5中可以分辨第1个波包为与激励信号同步的串扰信号,第2个波包为速度最快模态的直达波信号,后面波包为其他模态直达波与端面反射波的叠加,不做分析。首先,利用时间飞行法来计算直达波的波速,已知激励和接收传感器之间的距离为l=200mm,直达波的传播时间δt=43.51μs(图5中2号波包时间减去初始激励时间),对应的直达波波速v=l/δt=4597m/s。由图3给出的腹板的群速度频散曲线可知,150khz频率下对应的s1模态的理论群速度为4494,与本试验计算的直达波波速基本吻合,相差2.3%。因此可以判定直达波为lamb的s1模态,实际传播群速度为4597m/s。
[0045]
然后对采集到的原始检测信号进行分析,图6和图7分别给出了1号传感器激励,12号传感器接收,无缺陷和有缺陷状况下的接收信号,将两种情况下的接收信号做差,得到包含缺陷信息的散射信号,如图8所示。从图8中可以看出,在信号中存在一个明显的缺陷反射回波,可以说明该方法可以实现前拉杆接头区域缺陷的监测。
[0046]
对传感路径上的散射信号采用椭圆定位算法进行处理,即根据激励、接收传感器位置和缺陷反射回波的传播时间可以将缺陷定位在以传感器1和传感器12为焦点,以缺陷回波传播距离为长轴的椭圆轨迹上,定位结果如图9所示。其中方框代表传感器所在位置,叉号表示缺陷位置。可以看出,模拟缺陷所在位置或附近的椭圆轨迹颜色较深,说明该方法可以实现模拟缺陷的椭圆定位。
[0047]
为了实现结构中缺陷的定位,需要把传感器阵列的单元定位结果进行数据融合,根据式(6
‑
2),将所有单元定位结果进行相加融合,得到基于传感器阵列的缺陷定位结果,如图10所示。从定位结果可以看出,图中颜色最深的位置与模拟缺陷实际位置十分吻合。因此可以说明,本发明所提出的岸桥前拉杆接头缺陷超声导波监测方法,可用实现前拉杆接头区域缺陷的监测与定位。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1