一种周界区域入侵检测管理系统及检测方法与流程
1.本发明涉及报警装置领域,尤其涉及一种周界区域入侵检测管理系统及检测方法。
背景技术:
2.在科技还没有足够发达之前,大多数场所为了防止非法的入侵和各种破坏活动,都只是在外墙周围设置屏障(如铁栅栏、篱笆网、围墙等)或阻挡物,安排人员加强巡逻。随着犯罪分子利用更先进的科学技术,犯罪手段更加复杂化、智能化,传统的防范手段已难以适应要害部门、重点单位安全保卫工作的需要;人力防范往往受人员、地域、人员素质和精力的影响,亦难免出现漏洞和失误。因此,随着市场需求进一步扩大,科学技术的发展推动,各种周界安防技术不断出现,各种入侵探测报警系统融入到安防领域,成为安防领域的重要组成部分——“周界防范”。
3.周界区域入侵检测系统主要应用于对某一区域及其边界进行防范,当被外来事物入侵后识别入侵类型,根据预设规则发出告警信号,启动预置设备,记录入侵信号和\或远传入侵信息的防范体系。周界区域入侵检测系统从最初的纯物理检测手段(例如,电子围栏、红外对射器)逐渐发展到现在的多种技术融合的综合性周界区域入侵检测系统。
4.现有的周界区域入侵检测系统大体分为:红外对射、微波对射、泄漏电缆、振动电缆/光纤、电子围栏/电网、静电感应等入侵检测系统。其中,红外对射、微波对射易受地形条件或恶劣气候等环境因素影响;振动电缆/光纤受外界影响较大,行人或路过车辆在周界区域外通过时产生的振动极易引起误报;泄漏电缆造价高、施工复杂、雷雨天容易产生误报且无法精确定位入侵位置;电子围栏/电网等对人身有一定的危害性;静电感应造价过高且易受环境因素影响。由此可见,现有的周界区域入侵检测系统容易受到外界环境(地形、恶劣天气等)的影响而产生误报、漏报,缺乏精确定位入侵位置的手段,施工维护复杂,系统信息化程度低。导致现有的周界区域入侵检测系统存在准确率低、灵敏度低、智能性差等问题。
5.现有的周界区域入侵检测系统的系统输出量通常为开关量信号,通常只能检测到周界区域出现了入侵物体,无法准确地提供入侵物体的性质(如:生物还是非生物)、当前准确位置、运动趋势等信息,缺乏多源数据的综合管理处置能力。
技术实现要素:
6.为了克服现有系统只能检测到周界区域是否出现入侵物体,易产生误报、漏报,无法准确地提供入侵物体的性质、当前准确位置、运动趋势等信息,无法实现层次化的分类告警的问题,本发明提供一种周界区域入侵检测管理系统及检测方法,能够准确地提供入侵物体的性质、当前准确位置、运动趋势等信息。
7.本发明采用的技术方案是:一种周界区域入侵检测系统,包括若干个主动式毫米波雷达、若干个被动式红外信号接收器、大气温度测量模块、数据处理模块、无线传输模块、视频采集模块、就地声光告警模块;
8.所述若干个主动式毫米波雷达、所述若干个被动式红外信号接收器、所述大气温度测量模块设于周界区域边界处,且所述若干个主动式毫米波雷达和所述若干个被动式红外信号接收器布置于同一个水平截面上;
9.所述若干个主动式毫米波雷达、所述若干个被动式红外信号接收器、所述大气温度测量模块、视频采集模块、就地声光告警模块均与数据处理模块电性相连;
10.所述主动式毫米波雷达用于将若干个同时位于其检测区域的入侵物体与该主动式毫米波雷达之间的距离值、各入侵物体与主动式毫米波雷达天线法线方向的方位角度、各入侵物体的速度值,发送到数据处理模块;所述被动式红外信号接收器用于将其检测到周界区域内的红外辐射值发送到数据处理模块;所述大气温度测量模块用于将周界区域的实时大气温度值发送到数据处理模块;所述视频采集模块用于将采集到的视频数据发送到数据处理模块;所述无线传输模块用于将数据处理模块与互联网或局域网通信相连;所述就地声光告警模块用于在收到数据处理模块的启动信号后进行声光报警。
11.作为优选地,所述主动式毫米波雷达数量不小于三个时,采用非共线方式设置,且相邻所述主动式毫米波雷达之间的连线所构成的网格均匀分割周界区域。
12.优选地,所述主动式毫米波雷达为fmcw型毫米波雷达。
13.一种周界区域入侵管理系统,包含至少一个上述周界区域入侵检测系统,还包括数据中心,所述数据处理模块与数据中心通信相连;所述数据中心用于汇总至少一个所述数据处理模块的信息,计算并记录各入侵物体的运动轨迹。
14.作为优选地,所述数据中心还用于保存并执行分层次的入侵应对方案。
15.一种周界区域入侵检测方法,其特征是:实现步骤如下:
16.s1:在数据处理模块中记录在周界区域边界处布置的若干个主动式毫米波雷达、若干个被动式红外信号接收器的几何关系信息;数据处理模块实时接收大气温度测量模块检测到的环境温度数据,数据处理模块根据环境温度数据按照内置规则动态调整红外检测的判定阈值;
17.s2:主动式毫米波雷达检测到周界区域出现若干入侵物体后,将各个入侵物体的距离、方位角度、速度发送到数据处理模块;
18.s3:数据处理模块根据接收到的数据,使用几何算法计算出各个入侵物体在周界区域内的精确位置;
19.s4:数据处理模块根据步骤s3中得到的位置信息启动距离各入侵物体最近的被动式红外信号接收器并接收红外信号量值,并根据判定阈值进行生物检测,判断各入侵物体是否为生物;
20.s5:数据中心根据步骤s3、步骤s4获取的信息,根据梯度预测算法计算各入侵物体的运动趋势。
21.作为优选地,所述步骤s2中,主动式毫米波雷达检测到周界区域出现若干入侵物体后,还将各个入侵物体的雷达波反射截面积发送到数据处理模块。
22.优选地,所述步骤s4中,实现根据判定阈值进行生物检测的方法如下:
23.在周界区域入侵检测系统安装完毕并进行调试时,记录下当时的温度t0和红外信号接收器的输出值h0,设定环境温度为t
i
时判定侵物体是否为生物的判定阈值公式为:
其中h
t
为环境温度为t
i
的判定阈值,d为超越度百分数,α为环境系数;对混合型周界区域,按照动式红外信号接收器视场区域内各类型地物的面积占总面积的百分比作为权重,以加权平均的方式求出环境系数;当出现红外信号量值大于h
t
时,认为出现生物入侵。
24.优选地,所述步骤s5中,梯度预测算法具体是:
25.假设入侵对象在t
i
时刻点的轨迹点特征向量为[x
i
,v
xi
,a
xi
,y
i
,v
yi
,a
yi
]t
i
,其中:x
i
和y
i
为t
i
时刻入侵物体在周界区域的水平方向和垂直方向的坐标值,v
xi
和v
yi
为t
i
时刻的水平方向速度和垂直方向的速度,a
xi
和a
yi
为t
i
时刻的水平方向速度和垂直方向的加速度;在采样间隔时间t固定的情况下:v
xi
=(x
i
‑
x
i
‑1)/t,a
xi
=(x
i
+x
i
‑2‑
2x
i
‑2)/t2,v
yi
=(y
i
‑
y
i
‑1)/t,a
yi
=(y
i
+y
i
‑2‑
2y
i
‑2)/t2;根据t
i
时刻的v
xi
,a
xi
,v
yi
,a
yi
对水平方向和垂直方向分别用δs=vt+at2/2计算出t
i+1
时刻点的水平方向和垂直方向增量;将该增量与t
i+1
时刻点的实测值进行比较,如果误差小于等于设定值则使用该加速度进行后续轨迹点的计算,如果如果误差大于设定值,则用当前的数据按照上述公式进行计算;按照牛顿运动方程计算并预测入侵物的运动轨迹。
[0026]
优选地,还包括步骤如下:
[0027]
s6:根据步骤s2、步骤s3、步骤s4获取的信息,使用内置的决策矩阵法确定入侵的危险等级;
[0028]
s7:根据步骤s5的危险等级按照内置规则确定需要执行的应急操作;
[0029]
s8:数据中心收到就地信息后依据内置程序进行处理。
[0030]
本发明的有益效果是:
[0031]
(1)具有包含生物感在内的多源数据的综合管理处置能力。
[0032]
(2)通过预测算法进行入侵物体的运动趋势分析,本技术方案可以根据相关信息实现层次化的分类告警。
附图说明
[0033]
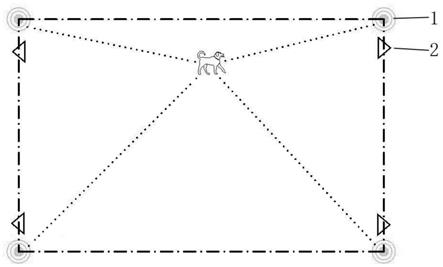
图1为本发明的周界区域入侵检测示意图。
[0034]
其中:1、主动式毫米波雷达;2、被动式红外信号接收器。
具体实施方式
[0035]
下面,结合附图以及具体实施方式,对本发明做进一步描述,需要说明的是,在不相冲突的前提下,以下描述的各实施例之间或各技术特征之间可以任意组合形成新的实施例。
[0036]
参见图1,本发明是一种周界区域入侵检测系统,包括若干个主动式毫米波雷达1、若干个被动式红外信号接收器2、大气温度测量模块、数据处理模块、无线传输模块、视频采集模块、就地声光告警模块;
[0037]
若干个主动式毫米波雷达1、若干个被动式红外信号接收器2、大气温度测量模块设于周界区域边界处,且若干个主动式毫米波雷达1和若干个被动式红外信号接收器2布置于同一个水平截面上;
[0038]
若干个主动式毫米波雷达1、若干个被动式红外信号接收器2、大气温度测量模块、视频采集模块、就地声光告警模块均与数据处理模块电性相连;
[0039]
主动式毫米波雷达1用于将若干个同时位于其检测区域的入侵物体与该主动式毫米波雷达1之间的距离值、各入侵物体与主动式毫米波雷达1天线法线方向的方位角度、各入侵物体的速度值,发送到数据处理模块;被动式红外信号接收器2用于将其检测到周界区域内的红外辐射值发送到数据处理模块;大气温度测量模块用于将周界区域的实时大气温度值发送到数据处理模块;视频采集模块用于将采集到的视频数据发送到数据处理模块;无线传输模块用于将数据处理模块与互联网或局域网通信相连;就地声光告警模块用于在收到数据处理模块的启动信号后进行声光报警。
[0040]
优选地,主动式毫米波雷达1数量不小于三个时,采用非共线方式设置,且相邻主动式毫米波雷达1之间的连线所构成的网格均匀分割周界区域。
[0041]
优选地,主动式毫米波雷达1为fmcw(调频连续波)型毫米波雷达,其对多目标的测距精度优于0.2m,对多目标的角度测量精度优于2
°
,对多目标的测速精度优于0.05m/s。优先选用能提供多目标各自反射截面积的fmcw型毫米波雷达。
[0042]
优选地,被动式红外信号接收器2的敏感波段为动物辐射红外波段,优选地关注人体辐射红外波段。
[0043]
优选地,大气温度测量模块为数字式测温装置,具备室外长期工作所需的防护等级,其测温精度优于0.1℃。
[0044]
优选地,数据处理模块为基于linux内核的嵌入式系统,其采用arm处理器和fpga芯片构建;该嵌入式系统中内置了多种通用接口以实现与主动式毫米波雷达1、大气温度测量模块、数据处理模块、无线传输模块、视频采集模块、就地声光告警模块等的通信。
[0045]
优选地,无线传输模块是基于4g/5g技术的透明传输模块。
[0046]
一种周界区域入侵管理系统,包含至少一个上述周界区域入侵检测系统,还包括数据中心,数据处理模块与数据中心通信相连;数据中心用于汇总至少一个数据处理模块的信息,计算并记录各入侵物体的运动轨迹。
[0047]
作为优选地,数据中心还用于保存并执行分层次的入侵应对方案。
[0048]
优选地,数据中心是高性能服务器。
[0049]
一种周界区域入侵检测方法,其实现步骤如下:
[0050]
s1:在数据处理模块中记录在周界区域边界处布置的若干个主动式毫米波雷达1、若干个被动式红外信号接收器2的几何关系信息;数据处理模块实时接收大气温度测量模块检测到的环境温度数据,数据处理模块根据环境温度数据按照内置规则动态调整红外检测的判定阈值;
[0051]
s2:主动式毫米波雷达1检测到周界区域出现若干入侵物体后,将各个入侵物体的距离、方位角度、速度发送到数据处理模块;
[0052]
s3:数据处理模块根据接收到的数据,使用几何算法计算出各个入侵物体在周界区域内的精确位置;
[0053]
s4:数据处理模块根据步骤s3中得到的位置信息启动距离各入侵物体最近的被动式红外信号接收器2并接收红外信号量值,并根据判定阈值进行生物检测,判断各入侵物体是否为生物;
[0054]
s5:数据中心根据步骤s3、步骤s4获取的信息,根据梯度预测算法计算各入侵物体的运动趋势。
[0055]
优选地,还包括步骤如下:
[0056]
s6:根据步骤s2、步骤s3、步骤s4获取的信息,使用内置的决策矩阵法确定入侵的危险等级;
[0057]
s7:根据步骤s5的危险等级按照内置规则确定需要执行的应急操作;
[0058]
s8:数据中心收到就地信息后依据内置程序进行处理。
[0059]
优选地,步骤s2中,主动式毫米波雷达1检测到周界区域出现若干入侵物体后,还将各个入侵物体的雷达波反射截面积发送到数据处理模块。
[0060]
优选地,步骤s4中,实现根据判定阈值进行生物检测的方法如下:
[0061]
被动式红外信号接收器2的中心工作波长为9.65
±
0.1μm,在周界区域入侵检测系统安装完毕并进行调试时,记录下当时的温度t0和红外信号接收器的输出值h0,设定环境温度为t
i
时判定侵物体是否为生物的判定阈值公式为:其中h
t
为环境温度为t
i
的判定阈值,d为超越度百分数,优选地选5%~10%;α为环境系数,常见的如:纯水泥地0.05、裸泥地0.03、植被密覆盖地域0.01、纯水域0.005,对混合型周界区域,按照动式红外信号接收器视场区域内各类型地物的面积占总面积的百分比作为权重,以加权平均的方式求出环境系数。出现红外信号量值大于h
t
时,认为出现生物入侵。
[0062]
优选地,步骤s5中,梯度预测算法实现方法如下:
[0063]
假设入侵对象在t
i
时刻点的轨迹点特征向量为[x
i
,v
xi
,a
xi
,y
i
,v
yi
,a
yi
]t
i
,其中:x
i
和y
i
为t
i
时刻入侵物体在周界区域的水平方向和垂直方向的坐标值,v
xi
和v
yi
为t
i
时刻的水平方向速度和垂直方向的速度,a
xi
和a
yi
为t
i
时刻的水平方向速度和垂直方向的加速度;在采样间隔时间t固定的情况下:v
xi
=(x
i
‑
x
i
‑1)/t,a
xi
=(x
i
+x
i
‑2‑
2x
i
‑2)/t2,v
yi
=(y
i
‑
y
i
‑1)/t,a
yi
=(y
i
+y
i
‑2‑
2y
i
‑2)/t2;根据t
i
时刻的v
xi
,a
xi
,v
yi
,a
yi
对水平方向和垂直方向分别用δs=vt+at2/2计算出t
i+1
时刻点的水平方向和垂直方向增量;将该增量与t
i+1
时刻点的实测值进行比较,如果误差小于等于设定值(预设为小于1%)则使用该加速度进行后续轨迹点的计算,如果如果误差大于设定值,则用当前的数据按照上述公式进行计算,直至精度满足需要;根据满足精度的加速度等条件按照牛顿运动方程计算并预测入侵物的运动轨迹。
[0064]
作为本发明的其中一个实施例,具体如下:
[0065]
本实施的周界区域入侵检测系统,包括设置周界区域边界处的若干个主动式毫米波雷达1、若干个被动式红外信号接收器2;还包括大气温度测量模块、数据处理模块、无线传输模块、视频采集模块、就地声光告警模块和数据中心。
[0066]
将6个主动式毫米波雷达1和被动式红外信号接收器2布置于同一个水平截面上(垂直方向的高差小于0.5米),主动式毫米波雷达1之间的连线所构成的网格均匀地分割周界区域。
[0067]
主动式毫米波雷达1均连接到数据处理模块,主动式毫米波雷达1能将若干个同时位于周界区域内的以下参数:入侵物体的与该主动式毫米波雷达1之间的距离值、入侵物体与主动式毫米波雷达1天线法线方向的方位角度、入侵物体的速度值,并发送到数据处理模块。被动式红外信号接收器2均连接到数据处理模块,被动式红外信号接收器2将其检测到周界区域内的红外辐射值发送到数据处理模块。大气温度测量模块连接到数据处理模块,
它能将周界区域的实时大气温度值发送到数据处理模块。视频采集模块连接到数据处理模块,它能采集到的视频数据发送到数据处理模块。无线传输模块连接到数据处理模块,它能将数据处理模块发送给它的数据通过无线传输的方式传送至约定的设备中。就地声光告警模块连接到数据处理模块,它在收到数据处理模块的启动信号后能按照预置的方式进行声光报警。数据中心与数据处理模块通过无线传输模块进行连接,它们间能进行双向数据传输。
[0068]
主动式毫米波雷达1为fmcw(调频连续波)型毫米波雷达,其对多目标的测距精度优于0.1m,对多目标的角度测量精度优于1
°
,对多目标的测速精度优于0.01m/s。优先选用能提供多目标各自反射截面积的fmcw型毫米波雷达。被动式红外信号接收器2的敏感波段为动物辐射红外波段,尤为关注人体辐射红外波段。大气温度测量模块为数字式测温装置,具备室外长期工作所需的防护等级,其测温精度优于0.1℃。数据处理模块为基于linux内核的嵌入式系统,其采用arm处理器和fpga飓风4代芯片构建;该嵌入式系统中内置了多种通用接口以实现与主动式毫米波雷达1、大气温度测量模块、数据处理模块、无线传输模块、视频采集模块、就地声光告警模块等的通信。无线传输模块为基于4g/5g技术的透明传输模块。
[0069]
本实施例的电子围栏式入侵检测方法,实现步骤如下:
[0070]
s1:在周界区域边界处的选定位置处布置若干个主动式毫米波雷达1、若干个被动式红外信号接收器2,并记录它们的几何关系信息;将主动式毫米波雷达1、被动式红外信号接收器2、大气温度测量模块、无线传输模块、视频采集模块、就地声光告警模块连接到数据处理模块;实现数据处理模块和数据中心的远程通信;通过系统调试使得系统硬件处于正常工作状态;其中大气温度测量模块实时检测大气温度,并将温度值传送到数据处理模块,数据处理模块根据环境温度值按照内置规则动态调整红外检测的判定阈值;
[0071]
s2:主动式毫米波雷达1检测到周界区域出现若干入侵物体后,将各个入侵物体的距离、方位角度、速度数据发送到数据处理模块;
[0072]
s3:数据处理模块根据预置的周界区域边界信息并结合多个主动式毫米波雷达1提供的信息,使用几何算法计算出各个入侵物体在周界区域内的精确位置;
[0073]
s4:数据处理模块根据s3中得到的位置信息启动距离各入侵物体最近的被动式红外信号接收器2并接收红外信号量值,数据处理模块根据内置规则及动态阈值进行生物检测,判断各入侵物体是否为生物;
[0074]
s5:根据s2、s3获取的信息,根据梯度预测算法确定各入侵物体的运动趋势分析;
[0075]
s5:根据s2、s3、s4获取的信息,使用内置的决策矩阵法确定入侵的危险等级;
[0076]
s6:根据s5的危险等级按照内置规则确定需要执行的应急操作,如对生物入侵启动声光设备进行驱离,对人员入侵进行语音告警并视频取证并远传,对非生物入侵不启动声光设备;
[0077]
s7:数据中心收到就地信息后依据使用专用软件处理相关数据。
[0078]
本实施例中,通过分类的告警信息,智能化地选择相应的应急操作,使得应急过程有针对性且高效。
[0079]
上述实施方式仅为本发明的优选实施方式,不能以此来限定本发明保护的范围,本领域的技术人员在本发明的基础上所做的任何非实质性的变化及替换均属于本发明所
要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1