一种基于道路交通点云数据的背景滤除方法
1.本发明涉及一种基于道路交通点云数据的背景滤除方法,属于交通安全技术领域。
背景技术:
2.道路交通安全一直是困扰交通领域的难点问题,计算机技术的发展为交通安全带来了新的解决方案,基于三维点云数据的高精度数字地图应运而生,为突破传统道路交通安全管控方式带来新的思路。
3.激光雷达作为一种新型智能感知设备,具有体积小、3d成像、信息实时感知、不受光照影响、精度高等特点,目前被应用于道路交通领域的研究。将激光雷达安装在路侧,可以获取在途用户(行人、机动车、非机动车)的速度、位置等信息,也可以对静态目标(建筑、交通设施、树木等)进行识别扫描。为解决道路交通安全问题,亟需一套完整的高精度数字地图构建技术,背景滤除算法作为构建高精度数字地图的基础,背景点提取的完整度直接影响到数字地图的精度。以激光雷达点云数据为数字地图基本框架,由于点云数据中存在静态目标与动态目标,动态目标易对高精地图的构建产生干扰,因此建图过程中需要将静态目标(即背景点)保留,剔除动态目标,以提高数字地图的精确度。
4.传统的背景滤除算法仅考虑目标未受遮挡时的情况,为此提出本发明,当某目标受到遮挡时,判断其属于动态目标还是静态目标,从而使整个背景滤除过程更加完善准确。
技术实现要素:
5.针对现有技术的不足,本发明提供一种基于道路交通点云数据的背景滤除方法,以路侧激光雷达点云数据为基础,通过背景滤除算法,将点云中的静态目标(背景点)与动态目标进行区分,以减少高精度数字地图建图过程中动态目标带来的影响。
6.术语解释:
7.ransac(random sample consensus):它是根据一组包含异常数据的样本数据集,计算出数据的数学模型参数,得到有效样本数据的算法。
8.dbscan(density
‑
based spatial clustering of applications with noise):是一个比较有代表性的基于密度的聚类算法。与划分和层次聚类方法不同,它将簇定义为密度相连的点的最大集合,能够把具有足够高密度的区域划分为簇,并可在噪声的空间数据库中发现任意形状的聚类。
9.遍历算法:即点云遍历,选定一点a,计算空间中其余各点与点a的距离,计算完毕后,再选取除a外任意一点b,计算空间中其余各点(除点a外)与点b的距离,重复上述步骤可将空间中任意两点的距离计算出来。
10.本发明的技术方案如下:
11.一种基于道路交通点云数据的背景滤除方法,操作步骤如下:
12.(1)通过路侧激光雷达获取道路上的所有目标(行人、机动车、非机动车、静态目
标),得到待处理的三维点云数据;
13.(2)将待处理的三维点云数据按照每帧进行提取,选取第1帧为初始帧1,并对其余所有帧顺次进行编号,编号按时间顺序分别为帧2、帧3、帧4、
…
、帧j、
…
、帧n,在初始帧1中选取一点作为初始点a;
14.(3)根据编号顺序将其余所有帧与初始帧1进行比对,探寻初始点a在其它帧中是否均出现;
15.(4)其余所有帧中,若初始点a均出现在搜索范围内,则认为初始点a属于背景点,若初始点a均未出现在搜索范围内,则认为初始点a为非背景点,这种情况认为初始点a无遮挡。
16.优选的,步骤(2)中,三维点云数据按照每帧进行提取时,每隔10帧选取一帧,避免一辆车在数据采集过程中一直或者长时间停留在一个位置时计算量过大,同时10帧内运动物体变化较小。
17.优选的,步骤(3)中,由于初始点a可能因环境影响存在波动情况,因此在其它帧中找寻初始点a点时限定一个搜索范围,在其它帧中初始点a点的搜索范围设置为椭球形,由激光雷达垂直角分辨率与水平角分辨率确定搜索范围的长半轴与短半轴,并以初始点a的原始位置为椭球形球心。
18.进一步优选的,椭球形搜索范围长半轴与短半轴大小确定方式如下:
19.从水平角度出发(俯视激光雷达),激光雷达在360
°
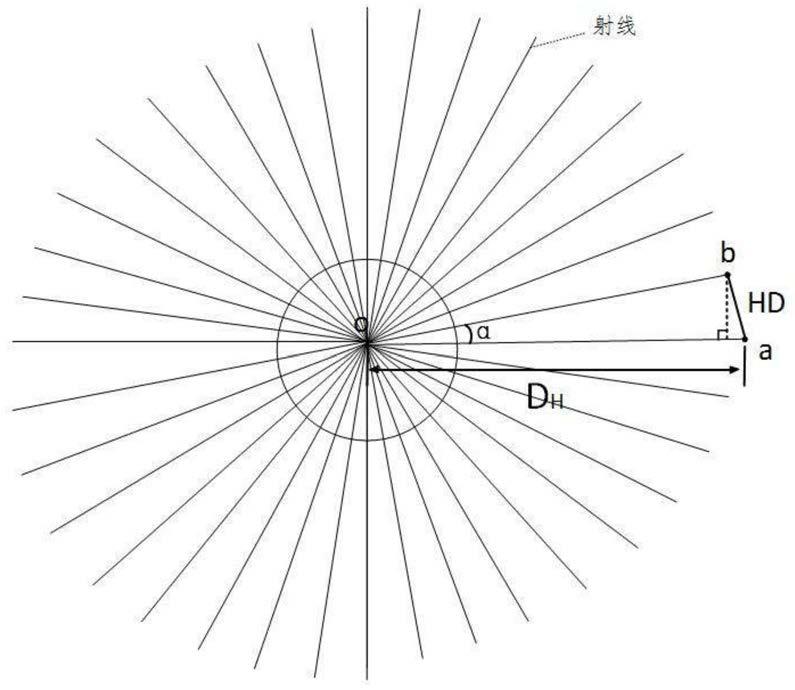
内存在射线,激光雷达的水平角分辨率α由激光雷达的机械性能确定,同一水平面内存在一圈距离激光雷达原点相等的点,如图2中a、b两点,该点与激光雷达原点距离为d
h
,同一水平面内相邻两点间的距离为hd,hd的计算公式如下:
[0020][0021]
在竖直平面内(正视激光雷达),激光雷达由于型号不同存在不同数量的激光线束,激光雷达的垂直角分辨率β,同一竖直平面内存在距离激光雷达坐标系原点相等的点,如图3中c、d所示,该点与激光雷达原点距离为d
v
,同一竖平面内两点之间的距离记为vd,vd计算公式如下:
[0022][0023]
初始点a的搜索范围为椭球形,激光雷达的水平角分辨率远小于垂直角分辨率,故规定搜索范围的长半轴为vd,短半轴为hd,椭球形球心为初始帧1中初始点a的位置,初始点a在其它帧中出现时,统称其它帧中的初始点a为临近点,其它帧中的临近点若出现在该椭球形搜索范围内,则认为点a在该帧中拥有临近点。
[0024]
优选的,步骤(4)中,临近点数量规定为nn,其它帧(不包含初始帧1)数量规定为nf,每个临近点在每帧中最多只出现一次,nn与nf的关系为0≤nn≤nf,表示为:
[0025]
nn∈[0,nf]
ꢀꢀꢀꢀ
(ⅲ)
[0026]
当nn=0时,临近点属于运动点,当nn=nf时,临近点属于背景点,当0<nn<nf时,说明部分帧中的访问点被遮挡,原因有二:第一种情况是访问点属于背景点,但被运动物体遮住;第二种情况是访问点属于运动物体,被另一运动物体遮住。
[0027]
优选的,步骤(4)中,若初始点a只在部分帧中出现,则认为初始点a在某些帧中被遮挡不可见,不可见点有两种情况:1)不可见点属于背景点;2)不可见点属于运动点;确认方法如下:
[0028]
a、在初始帧中找寻初始点a搜索范围内的所有点,规定其为访问点,在初始点a消失的帧j中找寻这些访问点,将访问点中的可见点进行排除,其余不可见点作为一个组合,在初始帧中找寻这些不可见点搜索范围内的所有点,继续在帧j中进行可见点剔除,重复步骤a的操作找出所有不可见点。
[0029]
b、提取帧j中不可见点的目标点云,确定不可见点的形状,基于模拟仿真平台,模拟不同机动车、非机动车及行人受遮挡下的点云形状,与模拟实验结果进行对比,判断其是否属于非背景点;
[0030]
c、若与模拟实验结果匹配成功,则认为不可见点属于运动点;若匹配失败,找出这些点中距离最大的两点,并计算两点间的最大距离,当该距离大于20m时,则认为不可见点属于背景点,当这些点小于20m时,则认为不可见点属于运动点。
[0031]
进一步优选的,模拟仿真平台采用机器学习算法ransac或3d
‑
dbscan。
[0032]
优选的,步骤c中,若不可见点与模拟实验结果数据匹配程度达90%以上,则匹配成功,认为这些点属于运动点;若数据匹配程度处于80%
‑
90%之间,由于模拟仿真结果实验数据的限制,真实场景下的点云数据存在多样性,通过md算法进行进一步确定,具体如下:
[0033]
通过遍历算法,从所有被不可见点中提取出距离最远的两个点,并计算两点间的最大距离md,md的计算过程如下:
[0034][0035]
由于道路上的行驶车辆长度有限,常见货车一般不超过20m,计算出md的实际距离,当md>20m时,则认为不可见点过长而属于背景点,当md<20m时,则认为不可见点属于运动点;
[0036]
当匹配程度低于80%时,则认为这些点属于背景点。
[0037]
本发明的有益效果在于:
[0038]
1、本发明以路侧激光雷达点云数据为基础,通过背景滤除算法,将点云中的静态目标(背景点)与动态目标进行区分,以减少高精度数字地图建图过程中动态目标带来的影响。
[0039]
2、本发明的背景滤除精度高,为后续各项数据处理工作提供了数据基础。
[0040]
3、本发明通过被遮挡点的形状判断这些点是否属于背景点,极大提高背景滤除的效果与准确性。
[0041]
4、本发明可用于高精度数字地图的构建,通过区分静态目标与动态目标,降低建图过程中动态目标带来的影响,极大提高基于静态背景的数字地图的精确度及完整度。
附图说明
[0042]
图1为本发明的激光雷达坐标系示意图;
[0043]
图2为本发明的水平方向示意图;
[0044]
图3为本发明的竖直方向示意图;
[0045]
图4为本发明的背景滤除示意图;
[0046]
图5为本发明的被遮挡点的形状提取示意图。
具体实施方式
[0047]
下面通过实施例并结合附图对本发明做进一步说明,但不限于此。
[0048]
实施例1
[0049]
如图1
‑
4所示,本实施例提供一种基于道路交通点云数据的背景滤除方法,目标未受遮挡时,操作步骤如下,
[0050]
(1)通过路侧激光雷达获取道路上的所有目标(行人、机动车、非机动车、静态目标),得到待处理的三维点云数据,激光雷达自身的笛卡尔坐标系以激光雷达中心为原点,xy轴位于水平面内,z轴垂直于xy平面向上,基于激光雷达可以获取目标点的xyz坐标信息;
[0051]
(2)由于激光雷达点云数据以帧的形式存在,选取某一帧作为初始帧i,i=1,选取帧1中某一点作为初始点a,将其它所有帧与帧1进行对比,查看初始点a在不同帧中是否保持在同一位置。为了避免一辆车在数据采集过程中一直或者长时间停留在一个位置,同时考虑到10帧内运动物体变化较小,在一段完整的数据中,每隔10帧选取一帧进行对比,考虑到外界环境影响,同一背景点在小范围内存在波动,比如树叶,当初始点a在所有不同帧中均保持在规定范围内,认为初始点a属于背景点;
[0052]
在其它帧中初始点a点的搜索范围设置为椭球形,由激光雷达垂直角分辨率与水平角分辨率确定搜索范围的长半轴与短半轴,并以初始点a的原始位置为椭球形球心。
[0053]
椭球形搜索范围长半轴与短半轴大小确定方式如下:
[0054]
从水平角度出发(俯视激光雷达),激光雷达在360
°
内存在射线,激光雷达的水平角分辨率α由激光雷达的机械性能确定,同一水平面内存在一圈距离激光雷达原点相等的点,如图2中a、b两点,该点与激光雷达原点距离为d
h
,同一水平面内相邻两点间的距离为hd,hd的计算公式如下:
[0055][0056]
在竖直平面内(正视激光雷达),激光雷达由于型号不同存在不同数量的激光线束,激光雷达的垂直角分辨率β,同一竖直平面内存在距离激光雷达坐标系原点相等的点,如图3中c、d所示,该点与激光雷达原点距离为d
v
,同一竖平面内两点之间的距离记为vd,vd计算公式如下:
[0057][0058]
初始点a的搜索范围为椭球形,激光雷达的水平角分辨率远小于垂直角分辨率,故规定搜索范围的长半轴为vd,短半轴为hd,椭球形球心为初始帧1中初始点a的位置,初始点a在其它帧中出现时,统称其它帧中的初始点a为临近点,其它帧中的临近点若出现在该椭球形搜索范围内,则认为点a在该帧中拥有临近点。
[0059]
规定初始点a在其它帧中为临近点,临近点数量规定为nn,其它帧(不包含初始帧1)数量规定为nf,每个临近点在每帧中最多只出现一次,nn与nf的关系为0≤nn≤nf,表示
为:
[0060]
nn∈[0,nf]
ꢀꢀꢀꢀꢀ
(ⅲ)
[0061]
当nn=0时,临近点属于运动点,当nn=nf时,临近点属于背景点,当0<nn<nf时,说明部分帧中的访问点被遮挡,原因有二:第一种情况是访问点属于背景点,但被运动物体遮住;第二种情况是访问点属于运动物体,被另一运动物体遮住。
[0062]
实施例2
[0063]
一种基于道路交通点云数据的背景滤除方法,步骤如实施例1所述,不同之处在于,目标未受遮挡时,需要判断被遮挡的点是否属于背景点,当这些点出现在其它帧中时可以将其作为背景点进行滤除,方便后续数据处理工作,
[0064]
当初始点a在某一帧j中消失时,在初始帧1中找寻距离a点最近的一点b,查看点b是否在第j帧中消失,若点b也消失,则将点a点b看作组合ab,在初始帧1中分别找寻点a和点b搜索范围内的所有点,在帧j中查看这些点是否可见,如果部分点可见,则剔除这些点,在初始帧1中找寻以剩下的点分别作为椭球球心的搜索范围内的所有点,同样剔除可见点,重复此步骤可将所有被遮挡点提取出来。
[0065]
基于模拟仿真平台,通过机器学习算法ransac或3d
‑
dbscan,进行被遮挡条件下的不同目标点云形状的模拟实验,由于激光雷达安装在路侧时其数据采集视角不受静态障碍物遮挡,在进行模拟实验仿真时仅考虑受动态目标遮挡的形状。
[0066]
首先,考虑到不同机动车与非机动车存在体积大小及外形相近等情况,将遮挡物与被遮挡目标分为0行人、1摩托车/电动车/自行车、2小轿车、3suv、4微、小型客车/微型面包车/mpv、5小型货车、6单元卡车、7皮卡、8中、大型客车/公交车、9大型货车(三轴及以上)。将这10种分类下的机动车、非机动车及行人进行遮挡仿真实验,遮挡效果分为全遮挡及部分遮挡,遮挡角度分为前、后、左、右、左前侧、左后侧、右前侧及右后侧。提取模拟实验被遮挡目标的点云数据,进行点云数据3d形状建模,将建模结果按照车型、遮挡效果、及遮挡角度进行分类存储,构建模拟仿真库。
[0067]
将提取出的形状与模拟仿真库进行比对,如图5所示,部分点云被一辆货车遮住,通过上述被遮挡点搜索方法,将所有被货车遮住的点全部提取出来,并根据点的分布提取出其形状(疑似轿车),再将该形状与数据库进行比对,对比结果说明被遮挡点属于轿车,即运动目标。若提取出的形状与库中的数据匹配程度达90%以上,则认为这些点属于其中一种运动物体;若数据匹配程度处于80%
‑
90%之间,由于模拟仿真结果实验数据的限制,真实场景下的点云数据存在多样性,通过md算法进行进一步确定,md定义如下:
[0068]
通过遍历算法,从所有被不可见点中提取出距离最远的两个点,并计算两点间的最大距离md,md的计算过程如下:
[0069][0070]
由于道路上的行驶车辆长度有限,常见货车一般不超过20m,计算出md的实际距离,当md>20m时,则认为不可见点过长而属于背景点,当md<20m时,则认为不可见点属于运动点;
[0071]
当匹配程度低于80%时,则认为这些点属于背景点。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1