一种面向多线激光雷达的VCSEL线性阵列
一种面向多线激光雷达的vcsel线性阵列
技术领域
1.本发明涉及激光探测和半导体光电子器件技术领域,具体是一种面向多线激光雷达的垂直腔面发射激光器(vcsel)线性阵列。
背景技术:
2.无人驾驶技术是即将改变人类生活的前沿科技,激光雷达在发展无人驾驶技术的过程中起到不可替代的作用。近几年来,多家企业和科研院校在激光雷达的多线工作、光束扫描以及减重方面进行了大量工作,不断满足了无人驾驶对激光雷达的各项要求。尤其是多线工作方面,已有64线甚至更多线的商品化激光雷达问世,无人驾驶激光雷达的线数已经成为衡量其性能的一个重要指标。
3.目前,广泛采用的实现激光雷达多线工作的方法是:采用多个激光器同时工作,分别以不同的垂直角度发射激光信号,结合水平旋转,从而实现多线工作。多激光器工作的方法将大大增加激光雷达的体积和重量,并提高了器件成本,这对于激光雷达的实际应用十分不利。采用集成化激光器线性阵列芯片,能够降低激光器本身造成的体积增大和成本提高。然而,普通的边发射半导体激光器线性阵列的光束调控是一大难题,不仅调控难度大,成本高,而且不够稳定,因此,激光器阵列在激光雷达方面的应用仍处于研究阶段。
4.垂直腔面发射激光器vcsel具有大功率光束质量好的优势,不仅可制作线性阵列,还可以制作二维面阵,因而在激光雷达方面具有重大应用潜力,但是vcsel阵列同样存在光束调控的难题。不同于边发射激光器,vcsel的出光方向垂直外延平面,便于集成光学元件,进而实现对输出激光束的调控。最为常见的光学元件即为透镜,已有工作通过集成微透镜的方式来对vcsel进行光束准直和聚焦(专利公开号:cn 107453201 a),微透镜加工技术也发展较为成熟。但对于多线激光雷达的应用,vcsel的阵列光束仍需外部光束调控,从而增加了多线激光雷达的体积、重量和成本。
技术实现要素:
5.本发明克服了现有技术的不足,针对vcsel阵列光束调控的难题,提出一种面向多线激光雷达的vcsel线性阵列,实现对vcsel输出激光束的准直和光束方向调控。进而面向多线激光雷达的应用,实现无需外部光束调控的vcsel线性阵列。
6.为了达到上述目的,本发明是通过如下技术方案实现的。
7.一种面向多线激光雷达的vcsel线性阵列,包括半导体衬底,m元呈线性阵列的垂直腔面发射激光器vcsel,以及m元光学微透镜;m元呈线性阵列的vcsel制备在半导体衬底正面,m元光学微透镜呈阵列设置在半导体衬底背面;m元vcsel彼此独立且输出m路互不相干的激光信号;vcsel与光学微透镜一一对应,光学微透镜用于将与其相对应的vcsel发散的激光进行准直并调控出光方向,形成多线激光束。
8.进一步的,所述光学微透镜直接制备在半导体衬底的背面。
9.进一步的,所述光学微透镜是折射透镜或是衍射透镜。
10.进一步的,所述半导体衬底的材质为gaas、inp、gasb中的一种。
11.进一步的,所述垂直腔面发射激光器vcsel包括垂直腔谐振结构,所述垂直腔谐振结构由两侧的分布布拉格反射器dbr,和设置在两侧dbr之间的激光器有源区组成,制备在半导体衬底上的dbr的光反射率小于远离半导体衬底一侧的dbr的光反射率。
12.本发明相对于现有技术所产生的有益效果为:1. 所述vcsel线性阵列可通过集成更多数量的vcsel增加输出激光的线数,同时通过衬底微透镜的设计调整,可以调控输出多线激光束的角度覆盖范围和分布,进而实现激光雷达的线数增加、垂直扫描范围改变和垂直分辨率控制;对光束方向的调控作用不仅适用于线性阵列,也适用于二维面阵,进一步提高芯片集成度;本发明能够输出多路相互独立的、准直的、具有不同出射方向的多线激光束,满足多线激光雷达的应用需求。
13.2. 所述vcsel线性阵列应用于激光雷达,仅通过更换vcsel线性阵列芯片便可以实现激光雷达线数调整,无需对激光雷达进行整机的重新设计和调整。
14.3. 所述vcsel线性阵列所需的制备工艺均为现有较为成熟的工艺技术,且不涉及复杂的工艺过程,因此本发明实际应用的实现将降低多线激光雷达的器件成本。
附图说明
15.图1是本发明所述一种面向多线激光雷达的vcsel线性阵列的整体结构示意图;图中:1是半导体衬底,2是vcsel,3是光学微透镜,4是多线激光束。
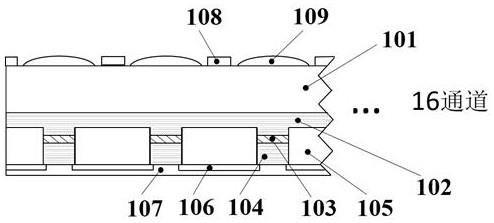
16.图2是本发明具体实施例:16线激光输出vcsel线性阵列的具体器件结构截面示意图;图中:101是gaas半导体衬底,102是变组份algaas构成的分布布拉格反射器(dbr),反射率84%,103是激光器有源区,104是变组份algaas超晶格构成的分布布拉格反射器,反射率大于99.5%,105是gaas二次外延层,106是sio2绝缘层,107和108分别是外延面和衬底面电极层,109是微透镜阵列。
17.图3是本发明具体实施例中vcsel线性阵列的16线激光输出效果图;图中:201是vcsel线性阵列,202是输出16线激光束。
具体实施方式
18.为了使本发明所要解决的技术问题、技术方案及有益效果更加清楚明白,结合实施例和附图,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。下面结合实施例和附图详细说明本发明的技术方案,但保护范围不被此限制。
19.面向无人驾驶激光雷达的应用,旨在进一步提高激光雷达的集成度,降低激光雷达成本,本发明的技术方案是提供一种面向多线激光雷达的vcsel线性阵列。
20.图1是一种面向多线激光雷达的vcsel线性阵列的整体结构示意图。如图1所示,面向多线激光雷达的vcsel线性阵列包括:半导体衬底1,m元线性阵列的vcsel 2,m元光学微透镜3。半导体衬底1材质可以是gaas、inp、gasb,视vcsel的材料体系而不同。m即为相应能够实现激光雷达的线数,阵列中的每个激光器都是相互独立的,没有模式耦合、相位同步及功率叠加等相互作用,从而阵列能够输出m路完全互不相干的激光信号。
21.半导体衬底1是制备vcsel的基底;m元vcsel 2中的每个激光器都是相互独立的,没有模式耦合、相位同步及功率叠加等相互作用,从而阵列能够输出m路完全互不相干的激光信号;光学微透镜3直接制备在半导体衬底1的背面,每一个独立的vcsel 2都有一个光学微透镜3与之相对应,vcsel发射的激光在衬底中发散、传播至背面微透镜处,透镜的作用在于将发散的激光进行准直并调控出光方向。m路完全互不相干的激光,经微透镜阵列准直、调控后,每一路激光束都具有不同的光束方向,且分布在一定的角度范围内,从而形成满足激光雷达应用的多线激光束4。
22.以下采用具体实施例进行说明,本实施例为一个面向16线无人汽车激光雷达的16元vcsel线性阵列,vcsel采用gaas衬底基的掩埋型结构,工作波长808 nm,单个vcsel的脉冲输出功率大于2w,具体器件结构见图2。图2中只画出vcsel线性阵列中的3个vcsel元,实际线性阵列中包括16个vcsel元。
23.如图2所示,具体实施例中的16线vcsel线性阵列具体包括101
‑
109九个部分,各部分说明见附图说明。其中,gaas半导体衬底101与图1中的1相对应。
24.两个dbr部分102和104夹着激光器有源区103构成vcsel的垂直腔谐振结构,102的光反射率约为84%,104的光反射率大于99.5%,因而vcsel产生激光从衬底方向出射。刻蚀出vcsel圆形台面结构阵列后,二次外延半绝缘gaas材料105,用作各vcsel元的光电隔离,同时行成vcsel器件的横向光限制波导结构,102
‑
105共同构成vcsel线性阵列,与图1中的2相对应。sio2绝缘层106起到巩固电隔离和横向波导的作用,两个电极层107和108的材质、平面结构视工艺平台和具体使用而不同,本实施例中不做详细阐述,106
‑
108属于进一步具体实施细节,可以归于vcsel阵列部分。
25.微透镜阵列109对应于图1中的3,本实施例中采用激光直写加工的浮雕型微透镜,微透镜阵列直接制备在衬底101的背面,每一个vcsel元有一个相对应的微透镜,16个vcsel发出16路相互独立的激光束,每个微透镜对一路激光进行准直和方向调控。
26.本实施例中,输出的16线激光束效果图如图3所示,两端vcsel元所输出的激光束与阵列面法线成12.4
°
夹角,向中间vcsel元所输出的激光束夹角依次减小,从而构成垂直扫描范围24.8
°
的16线激光雷达的扫描光束。考虑到激光雷达体积尽可能小的原则,为减小出光口大小,本实施中16线激光束先向中间汇聚后,再沿着各自的方向发散,光束聚集的位置即为激光雷达的出光口位置。
27.以上内容是结合具体的优选实施方式对本发明所做的进一步详细说明,不能认定本发明的具体实施方式仅限于此,对于本发明所属技术领域的普通技术人员来说,在不脱离本发明的前提下,还可以做出若干简单的推演或替换,都应当视为属于本发明由所提交的权利要求书确定专利保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1