基于智能驾驶的预测感知盲区中存在物体的方法及系统与流程
1.本发明涉及智能驾驶行业的环境感知领域,尤其是涉及基于智能驾驶的预测感知盲区中存在物体的方法及系统。
背景技术:
2.随着智能驾驶行业的飞速发展,以及社会对驾驶智能化需求的增长,智能驾驶应用的环境也变得越来越复杂。汽车行驶中,传感器受地形、建筑物、交通设施以及树木等的影响使感知范围受到限制,形成感知盲区。感知盲区是引发交通事故的重要原因,给驾驶员、乘客和行为的人身安全造成极大威胁。
3.公开号为cn103514758a的中国发明专利申请《一种基于车车通信的高效道路交通防碰撞预警方法》公开了一种通过专用短程通信技术(dsrc)获取附近盲区中车辆的运动状态信息,提高十字路口车辆通行安全性。该专利的实施的前提是道路中所有车辆均安装无线通信设备,在此种设备普及率不高情况下,即如果盲区中的车辆、行人、故障物体以及交通设施未安装此种设备,则无法使用该方法。
4.公开号为cn104376735b的中国发明专利申请《一种盲区路口车辆行驶安全预警系统及其预警方法》公开了一种在路侧立柱的横杆上安装相机、计算与处理模块和无线通信模块,对盲区路口车辆进行检测,并将盲区路口车辆的位置、航向角、速度以及加速度等信息广播出去。该专利的实施的前提是车辆安装车载单元,路边安装路侧单元,增加了智能驾驶的成本。并且,该专利只针对路口盲区,无法覆盖整个路段。相比路口通行,车辆在路段行驶时速度较快,此时由于其它车辆、路障的遮挡造成的盲区的危害性更大。
技术实现要素:
5.为解决现有技术的不足,本发明在智能驾驶过程中对比周围感知范围内的物体的预测行为与实际行为之间的差异,通过自身车载传感器主动实时获取感知盲区中的信息,推断盲区中是否存在物体,无需额外增加车
‑
车、车
‑
路通信单元,实现提高智能驾驶的安全性的目的,本发明采用如下的技术方案:基于智能驾驶的预测感知盲区中存在物体的方法,包括如下步骤:s1,汽车v上的感知系统,在t
k
时刻,感知到汽车v坐标系xoy下,一组被感知物体的状态集合{s(o
i
,t
k
) | i=1,2,3,...,n},生成感知结果env(v,t
k
),s(o
i
,t
k
)表示第i个被感知物体o
i
的状态,包括被感知物体o
i
的位置(x
i
,y
i
)、航向角φ、速度以及加速度等信息,k为自然数,n为被感知到的物体数量;所述感知系统包括激光雷达、超声波雷达、超声波雷达以及相机;s2,选择出n个被感知物体v1,v2,...,v
n
,其中任意一个被感知物体v
i
作为一个遮挡子,其满足以下要求:(a)v
i
为具有主动运动能力的物体;(b)v
i
位于汽车v即将要行驶的线路附近;
(c)v
i
遮挡了汽车v的感知系统对周围环境发出的电磁波信号,和/或遮挡了汽车v的感知系统从周围环境接收电磁波信号;s3,对每个v
i
进行处理,设v
i
的前进方向上,存在未被汽车v感知到的物体o
i’,汽车v根据感知结果是否包括o
i’,规划出两条等时长t的轨迹,不考虑o
i’的轨迹与考虑o
i’的轨迹,轨迹由等时长间隔d
t
的轨迹点序列组成,标记为{p
t
=(x
t
,y
t
),t=0,d
t
,2d
t
,...,t},两条轨迹在时间点t的差异e
t
,通过计算不考虑o
i’的轨迹上第t个时间点的位置p
不考虑,t
,与考虑o
i’的轨迹上第t个时间点的位置p
考虑,t
的欧式距离e
t
=((x
不考虑,t
‑
x
考虑,t
)2+(y
不考虑,t
‑
y
考虑,t
)2)
(1/2)
,得到两条轨迹所有对应时间点的欧氏距离并求和e=e0+e
dt
+e
2dt
+...+e
t
,利用e评估物体o
i’对汽车v的行驶造成的影响度;所述等时长t为2秒,等时长间隔d
t
为0.1秒;s4,选出遮挡子的影响度大于影响阈值的一组遮挡子vv,并对每个所述遮挡子vv进行如下处理:s41,选取与遮挡子vv类型相匹配的感知计算模型;所述感知计算模型,是二维坐标系转换,将汽车v坐标系xoy下的感知结果env(v, t
k
)和汽车v当前状态,转换到遮挡子vv坐标系x’o’y’下,转换后的env_tfm(vv,t
k
),表示遮挡子vv在t
k
时刻的推算感知结果,当k<0时,定义env_tfm(vv,t
k
)为空集;s42,选取与遮挡子vv类型相匹配的行为预测计算模型,所述行为预测计算模型,是考虑遮挡子vv类型的历史轨迹、动运学约束、动力学约束、道路地图、交通规则以及道路中其它交通参与者的深度学习模型,利用行为预测计算模型,根据env_tfm(vv,t
k1
),env_tfm(vv,t
k1
‑1),...,env_tfm(vv,t
k1
‑
h1
),预测出遮挡子vv从t
k1
时刻到t
k
时刻间会做出的预测行动action_p,其中k1=k
ꢀ‑ꢀ
δ,δ为预设正整数,h1为预设阈值,h1>=1;s43,根据汽车v对遮挡子vv在t
k
,t
k
‑1,t
k
‑2,...,t
k1
时刻的感知结果s(vv,t
k
), s(vv,t
k
‑1),s(vv,t
k
‑2),...,s(vv,t
k1
),计算遮挡子vv从t
k1
时刻到t
k
时刻间的实际行动action_a,其中当j<0时,定义s(vv,t
j
)为空集;s44,度量action_p和action_a的差异,当其大于等于差异阈值时,根据遮挡子vv的类型,设定遮挡子vv在时间t
k
时刻的速度为v
tk
,设定遮挡子vv前进方向距离为mv
tk
上,存在物体o
v
,m为距离系数,物体o
v
加上env_tfm(vv,t
k
)后,利用遮挡子vv对应的行为预测计算模型,预测出vv从t
k1
时刻到t
k
时刻间会做出的行动action_c;度量action_p和action_c的差异,并与度量action_p和action_a的差异计算存在物体o
v
的概率,若存在物体概率大于存在阈值,则将存在物体的状态转换为由汽车v的感知结果,并添加入env(v, t
k
)中;s5,输出添加后的感知结果env(v, t
k
),其为汽车v在t
k
时刻,对遮挡进行补偿后感知结果。
6.进一步地,所述s44中,存在物体o
v
的概率为min(dist(action_p, action_a)/dist(action_p, action_c), 1.0)。
7.进一步地,所述s4中,预测行动action_p为遮挡子vv从t
k1
时刻到t
k
时刻预测的位置姿态变化(x
p
, y
p
, θ
p
);实际行动action_a为遮挡子vv从t
k1
时刻到t
k
时刻的实际位置姿态变化(x
a
, y
a
, θ
a
);度量action_p和action_a的差异:dist(action_p, action_a)=w1|x
a
‑
x
p
|+w2|y
a
‑
y
p
|+w3|θ
a
‑
θ
p
|;行动action_c=(x
c
, y
c
, θ
c
),度量action_p和action_c的差异:dist(action_p, action_c)=w1|x
c
‑
x
p
|+w2|y
c
‑
y
p
|+w3|θ
c
‑
θ
p
|。
8.进一步地,所述s2的(a)中,通过记录v
i
的历史速度,确定v
i
为具有主动运动能力的
物体。
9.进一步地,所述s2的(b)中,通过计算v
i
的位置(x
i
,y
i
),与汽车v即将行驶的线路的车道中心线r,最短距离d(v
i
,r)小于第一距离阈值,确定v
i
位于汽车v即将要行驶的线路附近。
10.进一步地,所述第一距离阈值,是3倍的当前所在车道的车道宽度。
11.进一步地,所述v
i
相对于汽车v的距离小于第二距离阈值,确定v
i
位于汽车v即将要行驶的线路附近。
12.进一步地,所述第二距离阈值,为2倍的汽车v的速度值。
13.进一步地,所述s2的(c)中,通过计算v
i
占据汽车v的感知水平视场角度θ小于角度阈值,判断v
i
遮挡了汽车v的感知系统对周围环境发出的电磁波信号,和/或遮挡了汽车v的感知系统从周围环境接收电磁波信号。
14.基于智能驾驶的预测感知盲区中存在物体的系统,包括汽车本体v、感知系统、处理单元,所述处理单元分别与感知计算模型和行为预测计算模型连接;所述感知系统,在t
k
时刻,感知到汽车v坐标系xoy下,一组被感知物体的状态集合{s(o
i
,t
k
) | i=1,2,3,...,n},生成感知结果env(v,t
k
),s(o
i
,t
k
)表示第i个被感知物体o
i
的状态,包括被感知物体o
i
的位置(x
i
,y
i
)、航向角φ、速度以及加速度等信息,k为自然数,n为被感知到的物体数量;所述感知系统包括激光雷达、超声波雷达、超声波雷达以及相机;所述处理单元,选择出n个被感知物体v1,v2,...,v
n
,其中任意一个被感知物体v
i
作为一个遮挡子,其满足以下要求:(a)v
i
为具有主动运动能力的物体;(b)v
i
位于汽车v即将要行驶的线路附近;(c)v
i
遮挡了汽车v的感知系统对周围环境发出的电磁波信号,和/或遮挡了汽车v的感知系统从周围环境接收电磁波信号;对每个v
i
进行处理,设v
i
的前进方向上,存在未被汽车v感知到的物体o
i’,汽车v根据感知结果是否包括o
i’,规划出两条等时长t的轨迹,不考虑o
i’的轨迹与考虑o
i’的轨迹,轨迹由等时长间隔d
t
的轨迹点序列组成,标记为{p
t
=(x
t
,y
t
),t=0,d
t
,2d
t
,...,t},两条轨迹在时间点t的差异e
t
,通过计算不考虑o
i’的轨迹上第t个时间点的位置p
不考虑,t
,与考虑o
i’的轨迹上第t个时间点的位置p
考虑,t
的欧式距离e
t
=((x
不考虑,t
‑
x
考虑,t
)2+(y
不考虑,t
‑
y
考虑,t
)2)
(1/2)
,得到两条轨迹所有对应时间点的欧氏距离并求和e=e0+e
dt
+e
2dt
+...+e
t
,利用e评估物体o
i’对汽车v的行驶造成的影响度;所述等时长t为2秒,等时长间隔d
t
为0.1秒;根据汽车v对遮挡子vv在t
k
,t
k
‑1,t
k
‑2,...,t
k1
时刻的感知结果s(vv,t
k
), s(vv,t
k
‑1),s(vv,t
k
‑2),...,s(vv,t
k1
),计算遮挡子vv从t
k1
时刻到t
k
时刻间的实际行动action_a,其中当j<0时,定义s(vv,t
j
)为空集;度量action_p和action_a的差异,当其大于等于差异阈值时,根据遮挡子vv的类型,设定遮挡子vv在时间t
k
时刻的速度为v
tk
,设定遮挡子vv前进方向距离为mv
tk
上,存在物体o
v
,m为距离系数,物体o
v
加上env_tfm(vv,t
k
)后,利用遮挡子vv对应的行为预测计算模型,预测出vv从t
k1
时刻到t
k
时刻间会做出的行动action_c;度量action_p和action_c的差异,并与度量action_p和action_a的差异计算存在物体o
v
的概率,若存在物体概率大于存在阈值,则将存在物体的状态转换为由汽车v的感知结果,并添加入env(v, t
k
)中,输出添
加后的感知结果env(v, t
k
),其为汽车v在t
k
时刻,对遮挡进行补偿后感知结果;所述感知计算模型,对选取的遮挡子的影响度大于影响阈值的一组遮挡子vv,进行二维坐标系转换,将汽车v坐标系xoy下的感知结果env(v, t
k
)和汽车v当前状态,转换到遮挡子vv坐标系x’o’y’下,转换后的env_tfm(vv,t
k
),表示遮挡子vv在t
k
时刻的推算感知结果,当k<0时,定义env_tfm(vv,t
k
)为空集;所述行为预测计算模型,是考虑遮挡子vv类型的历史轨迹、动运学约束、动力学约束、道路地图、交通规则以及道路中其它交通参与者的深度学习模型,利用行为预测计算模型,对选取与遮挡子vv类型相匹配的行为预测,根据env_tfm(vv,t
k1
),env_tfm(vv,t
k1
‑1),...,env_tfm(vv,t
k1
‑
h1
),预测出遮挡子vv从t
k1
时刻到t
k
时刻间会做出的预测行动action_p,其中k1=k
ꢀ‑ꢀ
δ,δ为预设正整数,h1为预设阈值,h1>=1。
15.本发明的优势和有益效果在于:本发明无需增加额外车
‑
车、车
‑
路通信单元,仅通过自身车载传感器对附近的物体进行感知,进而预测物体的行为,最终通过对比物体的预测行为与真实行为间的差异来推断盲区中是否存在物体,利用推断结果对自身的感知结果进行补偿,使智能驾驶决策规划模块能够预先考虑感知盲区的存在的物体,产生安全的驾驶行为。
附图说明
16.图1为由于物体遮挡造成汽车v感知盲区的示意图。
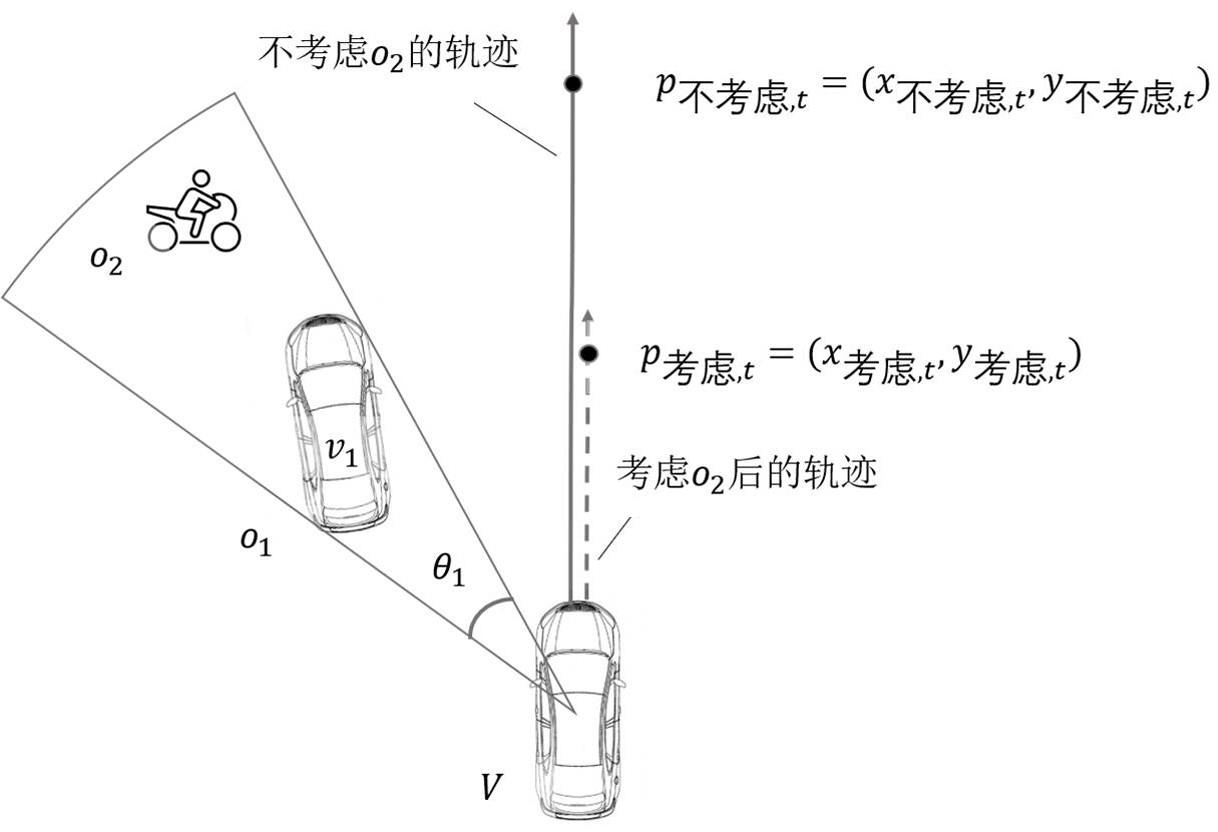
17.图2为本发明中计算遮挡子对汽车v的行驶造成影响的程度的示意图。
18.图3为本发明中二维坐标系转换公式的示意图。
具体实施方式
19.以下结合附图对本发明的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本发明,并不用于限制本发明。
20.一种在智能驾驶中预测感知盲区中存在物体的方法,包括以下步骤:(1)在汽车v上安装由激光雷达、超声波雷达、超声波雷达以及相机等组成的感知系统,设在t
k
时刻,k为自然数下标,该感知系统对当前周围环境进行感知,输出被感知到的若干物体在t
k
时刻的状态,记在t
k
时刻第i个被感知到的物体o
i
的状态为s(o
i
,t
k
),s(o
i
,t
k
)由物体在汽车v本体坐标系下的位置、航向角、速度以及加速度等信息组成。如图1所示,假设在汽车v附近有物体o1与o
2。
其中,物体o1被汽车v感知到;物体o2由于被物体o1遮挡未被汽车v感知到。汽车v本体坐标系为xoy,物体o1被在xoy上的坐标点为(x,y),航向角为phi。集合{s(o
i
,t
k
) | i=1,...,n, n为被感知到的物体数量}为感知系统对周围环境的感知结果,该感知结果由env(v, t
k
)标识。
21.(2)从被感知物体o1,o2,...,o
n
中选择出n个被感知物体v1,v2,...,v
n
,其中任意一个被选择的被感知物体v
i
称为一个遮挡子,其满足以下要求:(a)v
i
为具有主动运动能力的物体;该条可通过记录v
i
的历史速度来确定,一个优选的判定方法为: v
i
过去10秒内存在速度不为零,则 v
i
为具有主动运动能力的物体。(b)v
i
位于汽车v即将要行驶的线路附近,可以通过计算v
i
的位置(x,y)与汽车v即将行驶的线路的车道中心线r的最短距离d(v
i
,r)来确定v
i
位于汽车v即将要行驶的线路附近,一个优选的判定条件为:当d(v
i
,r)小于3倍的当前所
在车道的车道宽度,则v
i
位于汽车v即将要行驶的线路附近;且相对于汽车v的距离小于预设阈值,一个优选的阈值可设定为2倍的汽车v的速度值。(c)v
i
严重遮挡了汽车v的感知系统对周围环境发出的电磁波信号,或者严重遮挡了汽车v的感知系统从周围环境接收电磁波信号;一个优选的判定方法如图2所示,通过计算物体 v
i
占据汽车v感知水平视场角度theta小于某设定阈值来判断v
i
严重遮挡了汽车v的感知系统对周围环境发出的电磁波信号,或者严重遮挡了汽车v的感知系统从周围环境接收电磁波信号。
22.(3)每个遮挡子v
i
进行处理,其中i=1,..., n。如图2所示,o1被判定为遮挡子v1,假设v1的前进方向上存在着一个未被汽车v感知到的物体o2。汽车v根据感知结果是否包括o2规划出两条等时长t(一个优选的时长为2秒)的轨迹,图2中不考虑o2的轨迹(由带箭头实线表示)与考虑o2的轨迹(由带箭头虚线表示)。轨迹由等时长间隔d
t
(一个优选的时长间隔为0.1秒)的轨迹点序列组成,标记为{p
t
=(x
t
,y
t
),t=0,d
t
,2d
t
,...,t}。两条轨迹在时间点t的差异e可以通过计算不考虑o2的轨迹上第t个点p
不考虑,t
与考虑o2的轨迹上第t个点p
考虑,t
的欧式距离e
t
=((x
不考虑,t
‑
x
考虑,t
)2+(y
不考虑,t
‑
y
考虑,t
)2)
(1/2)
。求出两条轨迹所有对应点的欧氏距离并求和e=e0+e
dt
+e
2dt
+...+e
t
。利用e评估该物体对汽车v的行驶造成影响的程度。
23.(4)选择出遮挡子的影响度大于预定阈值的若干遮挡子,再对每个这样选出的遮挡子vv进行如下处理:(4.1)根据vv的类型,选择与vv类型相匹配的感知计算模型,一个优选的感知计算模型是如图3所示的二维坐标系转换公式。二维坐标系转换公式将汽车v坐标系xoy下的感知结果env(v, t
k
)和汽车v的当前状态转换到vv坐标系x’o’y’下,转换后的数据集记为env_tfm(vv,t
k
),称为vv在t
k
时刻的推算感知结果,当k<0时,定义env_tfm(vv,t
k
)为空集;具体地,根据汽车v位姿构建坐标系xoy,遮挡子vv在坐标系xoy下的位姿为(x
vv
, y
vv
, θ
vv
),基于vv的位姿,构建坐标系x’o’y’,在坐标系xoy下的位姿点(x, y, θ),可以利用如下二维坐标系转换公式得到该位姿点再坐标系x’o’y’的坐标与方向角(x’, y’, θ’):x’=(x
‑
x
vv
)cosθ
vv
+(y
‑
y
vv
) sinθ
vv
y’=(y
‑
y
vv
)cosθ
vv
‑
(x
‑
x
vv
) sinθ
vv
θ’=θ
‑
θ
vv
。
24.(4.2)根据vv的类型,选择与vv类型相匹配的行为预测计算模型,一个优选的行为预测计算模型是考虑vv类型的历史轨迹、动运学约束、动力学约束、道路地图、交通规则以及道路中其它交通参与者的深度学习模型。利用该行为预测计算模型,根据env_tfm(vv,t
k1
),env_tfm(vv,t
k1
‑1),...,env_tfm(vv,t
k1
‑
h1
),预测出vv从t
k1
时刻到t
k
时刻间会做出的行动action_p。一个优选的预测行动action_p表示为vv从t
k1
时刻到t
k
时刻的预测位置姿态变化,记为(x
p
, y
p
, theta
p
),其中k1=k
ꢀ‑ꢀ
delta,delta为预设正整数,h1为预设阈值,h1>=1。
25.(4.3)根据由汽车v对vv在t
k
,t
k
‑1,t
k
‑2,...,t
k1
时刻的感知结果s(vv,t
k
), s(vv,t
k
‑1),s(vv,t
k
‑2),...,s(vv,t
k1
),计算vv从t
k1
时刻到t
k
时刻间实际做出的行动action_a, 其中当j<0时,定义s(vv,t
j
)为空集;一个优选的实际行动表示为vv从t
k1
时刻到t
k
时刻的实际位置姿态变化,记为(x
a
, y
a
, theta
a
)。
26.(4.4)度量action_p和action_a的差异,一个优选的度量公式为dist(action_p, action_a)=w1|x
a
‑
x
p
|+w2|y
a
‑
y
p
|+w3|theta
a
‑
theta
p
|, 当差异大于等于预定阈值时,则进行
如下处理:根据vv的类型,使用env_tfm(vv,t
k
)和action_a,估计t
k
时刻在v
i
的前进方向上除了env_tfm(vv,t
k
)中记录的物体还存在其他物体的概率以及该可能存在物体的可能位置,一个优选的方案是,vv在时间t
k
时刻的速度为v
tk
,假定vv正前方距离为2v
tk
的存在物体o
v
, 并加env_tfm(vv,t
k
),利用vv对应的行为预测计算模型,预测出vv从t
k1
时刻到t
k
时刻间会做出的行动action_c=(x
c
, y
c
, theta
c
),度量action_p和action_c的差异dist(action_p, action_c)=w1|x
c
‑
x
p
|+w2|y
c
‑
y
p
|+w3|theta
c
‑
theta
p
|,利用dist(action_p, action_c)与dist(action_p, action_a)计算存在物体o
v
的概率为min(dist(action_p, action_a)/dist(action_p, action_c), 1.0)。若存在物体概率大于预定阈值,则将该物体的状态转换为由汽车v的感知结果,并添加入env(v, t
k
)中。
27.(5)输出env(v, t
k
),其为汽车v在t时刻对遮挡进行补偿后感知结果。
28.以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1