一种测量室内可视空间体积的装置及方法与流程
1.本发明涉及监测系统技术领域,具体为一种测量室内可视空间体积的装置及方法。
背景技术:
2.在农村建设的保鲜冷链冷库,大多安装了仓库信息采集设备,自动采集温度、湿度、二氧化碳浓度等。大型保鲜冷库配备自动采集进出仓货品重量设备,中小型保鲜冷库靠人工称重,然后输入信息采集系统。仓库信息数据传给政府管理部门。
3.我们调研发现,农户使用的大多是中小型保鲜冷库,没有配备自动称重和自动采集设备。每次进出仓库,都要人工称重,然后输入信息采集系统上传。由于此项操作需要专人细致工作,农户嫌麻烦,不愿做,因此,政府无法得到农户使用保鲜冷库数据。
4.政府投入大量经费建设的乡村保鲜冷库(全国超过几十万间),其职能部门希望得到分散在乡村各地的保鲜冷库使用情况数据,了解冷库是否闲置,在用保鲜冷库的使用率是多少。由于没有相关数据,因而缺乏对现有保鲜冷库进行有效的监控和管理,也缺乏未来新建保鲜冷库的数据依据。
技术实现要素:
5.(一)解决的技术问题
6.针对现有技术的不足,本发明提供了一种可实时监控保鲜冷库使用率的测量室内可视空间体积的装置及方法,解决了上述背景技术中提出的问题。
7.(二)技术方案
8.为实现以上目的,本发明通过以下技术方案予以实现:一种测量室内可视空间体积的装置,包括位于室内顶板上的机座箱体,所述机座箱体内设有驱动电机和控制器,所述驱动电机的转轴伸出机座箱体并连接安装架,所述安装架上设有激光雷达,所述安装架上设有检测片,所述机座箱体上设有与检测片配合的光电传感器,所述激光雷达、光电传感器和驱动电机与控制电性连接。
9.进一步的,所述机座箱体内设有通讯接口,所述通讯接口通过通讯天线或有线网络连接有上位机。
10.进一步的,所述激光雷达包括激光雷达机座,所述激光雷达机座内设有激光雷达旋转扫描机。
11.进一步的,所述激光雷达旋转扫描机位于驱动电机的转轴的轴线方向上。
12.进一步的,所述光电传感器至少设有两个且沿转轴的圆周方向均匀分布。
13.进一步的,所述驱动电机的转轴通过电机轴连接件与安装架连接。
14.一种测量室内可视空间体积的方法,包括如下步骤:
15.(1)在起始位置,安装架的检测片与光电传感器相对位,激光雷达旋转扫描机匀速转动1圈,向其转动轴垂直面发出连续激光光线,并以间隔固定角度a连续采集激光反射波,
测算光波运动距离,得到m个激光发生点到周围物体之间的距离值,这m个数值为s(1,1)、s(1,2)、
…
、s(1,m),把第1圈的测距数值数组,定义为s1,
16.即,s1=(s(1,1),s(1,2),
…
,s(1,m));
17.(2)设定:m*a=360度,激光雷达旋转扫描机旋转1圈,以足够小的间隔固定角度a采集和测量激光距离数据,m值就有足够大,把m个激光反射点连接起来,就形成能够真实反映当前室内可视空间环境的截面图,定义第1圈截面为q1
18.(3)激光雷达旋转扫描机完成q1圈工作后,控制器发信息给驱动电机,驱动电机向设定方向转动一个固定角度b,并通过安装架带动激光雷达向相同方向转动相同角度,之后,激光雷达旋转扫描机匀速转动1圈,重复q1圈的扫描动作,得到第2圈m个激光发生点到周围物体之间的距离值,这m个数值为s(2,1)、s(2,2)、
…
、s(2,m),把第2圈的测距数值数组,定义为s2,
19.即,s2=(s(2,1),s(2,2),
…
,s(2,m)),定义第2圈截面为q2;
20.(4)激光雷达旋转扫描机完成qn
‑
1圈工作后,控制器发信息给驱动电机,驱动电机向原运动方向转动一个固定角度b,并通过安装架带动激光雷达向相同方向转动相同角度,之后,激光雷达旋转扫描机完成第n圈扫描动作,得到第n圈m个激光发生点到周围物体之间的距离值,这m个数值为s(n,1)、s(n,2)、
…
、s(n,m),把第n圈的测距数值数组,定义为sn,
21.即,sn=(s(n,1),s(n,2),
…
,s(n,m)),定义第n圈截面为qn;
22.(5)设定,n*b=180度,激光雷达旋转扫描机完成n圈动作,同时转动了180度后,激光雷达安装架的检测片到达光电传感器位置,激光雷达完成了对整个室内空间的激光测距扫描,得到全部空间测距数据s,s=(s1,s2,
…
,sn);
23.(6)q1圈和q2圈之间的空间可分解为以激光雷达为顶点,已测量出距离值的激光线为边,数量共2*m个三棱锥,三棱锥的三条边为激光射出的三条光线,长度为已知,三条边的夹角为已知,用现成的计算公式可求三棱锥体积,。q1圈和q2圈之间的空间体积v1等于2*m个三棱锥的体积累加之和,同理,q2圈和q3圈之间的空间体积v2等于2*m个三棱锥的体积累加之和,qn
‑
1圈和qn圈之间的空间体积vn
‑
1等于2*m个三棱锥的体积累加之和,qn圈和q1圈之间的空间体积vn等于2*m个三棱锥的体积累加之和,由此可以得出室内可视空间体积v=v1+v2+
…
+vn。
24.(三)有益效果
25.综上所述,本发明利用激光雷达对已放置物品的室内空间进行经度和纬度全方位扫描,得到与周围物体的距离值,然后通过特定的计算方法计算出室内可视空间体积,从而可实时监控保鲜冷库的利用率,提高保鲜冷库的管理。
附图说明
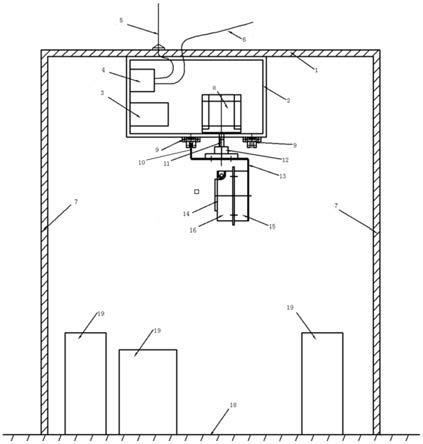
26.图1为本发明一种测量室内可视空间体积的装置的整体概念图;
27.图2为本发明遮挡空间说明图。
28.标注说明:1、室内顶板;2、机座箱体;3、控制器;4、通讯接口;5、通讯天线;6、有线网络;7、室内墙壁;8、驱动电机;9、光电传感器;10、检测片;11、转轴;12、电机轴连接件;13、安装架;14、激光雷达;15、激光雷达机座;16、激光雷达旋转扫描机;18、地面;19、货物。
具体实施方式
29.参照图1和图2对发明一种测量室内可视空间体积的装置及方法的实施例作进一步说明。
30.一种测量室内可视空间体积的装置,包括位于室内顶板1的机座箱体2,所述机座箱体2内设有驱动电机8和控制器3,所述驱动电机8的转轴11伸出机座箱体2并连接安装架13,所述安装架13上设有激光雷达14,所述安装架13上设有检测片10,所述机座箱体2上设有与检测片10配合的光电传感器9,所述激光雷达14、光电传感器9和驱动电机8与控制电性连接。
31.本实施例中的室内原始空间体积,以室内墙壁7、地面18、室内顶板1、门窗为边界,室内未放置任何可移动物品19的空间体积;室内可视空间体积:以激光雷达14为视线原点,目视看到的未被物品19占据的室内空间;物品19占用室内空间体积:以激光雷达14为视线原点,物品19占用室内空间体积=物品19体积+与相邻物体之间受物品19遮挡部分空间的体积,综合上述定义可以得到,室内原始空间体积=室内可视空间体积+物品19占用室内空间体积。
32.测量室内可视空间体积的装置最优安装位置是房顶中央。在实际工作中,由于测量室内可视空间体积的装置安装在室内顶面,激光雷达14高度以上的空间为已知,为了节省计算工作量,我们通常只取激光雷达14高度及以下的扫描数据,计算激光雷达14高度及以下的空间体积。
33.测量室内可视空间体积时,在起始位置,安装架13的检测片10与光电传感器9相对位,激光雷达旋转扫描机16匀速转动1圈,向其转动轴垂直面发出连续激光光线,并以间隔固定角度a连续采集激光反射波,测算光波运动距离,得到m个激光发生点到周围物体之间的距离值,这m个数值为s(1,1)、s(1,2)、
…
、s(1,m),把第1圈的测距数值数组,定义为s1,即,s1=(s(1,1),s(1,2),
…
,s(1,m));设定:m*a=360度,本实施例中我们设定m=720,a=0.5度,激光雷达旋转扫描机16旋转1圈,以足够小的间隔固定角度a采集和测量激光距离数据,m值就有足够大,把m个激光反射点连接起来,就形成能够真实反映当前室内可视空间环境的截面图,定义第1圈截面为q1,激光雷达旋转扫描机16完成q1圈工作后,控制器3发信息给驱动电机8,驱动电机8向设定方向转动一个固定角度b,并通过安装架13带动激光雷达14向相同方向转动相同角度,之后,激光雷达旋转扫描机16匀速转动1圈,重复q1圈的扫描动作,得到第2圈m个激光发生点到周围物体之间的距离值,这m个数值为s(2,1)、s(2,2)、
…
、s(2,m),把第2圈的测距数值数组,定义为s2,即,s2=(s(2,1),s(2,2),
…
,s(2,m)),定义第2圈截面为q2;激光雷达旋转扫描机16完成qn
‑
1圈工作后,控制器3发信息给驱动电机8,驱动电机8向原运动方向转动一个固定角度b,并通过安装架13带动激光雷达14向相同方向转动相同角度,之后,激光雷达旋转扫描机16完成第n圈扫描动作,得到第n圈m个激光发生点到周围物体之间的距离值,这m个数值为s(n,1)、s(n,2)、
…
、s(n,m),把第n圈的测距数值数组,定义为sn,即,sn=(s(n,1),s(n,2),
…
,s(n,m))。定义第n圈截面为qn;
34.n*b=180度,本实施例中我们设定m=720,a=0.5度,激光雷达旋转扫描机16完成n圈动作,同时转动了180度后,激光雷达14安装架13的检测片10到达光电传感器9位置,激光雷达14完成了对整个室内空间的激光测距扫描,得到全部空间测距数据s,s=(s1,s2,
…
,sn);q1圈和q2圈之间的空间可分解为以激光雷达14为顶点,已测量出距离值的激光
线为边,数量共2*m个三棱锥,三棱锥的三条边为激光射出的三条光线,长度为已知,三条边的夹角为已知,用现成的计算公式可求三棱锥体积,。q1圈和q2圈之间的空间体积v1等于2*m个三棱锥的体积累加之和,同理,q2圈和q3圈之间的空间体积v2等于2*m个三棱锥的体积累加之和,qn
‑
1圈和qn圈之间的空间体积vn
‑
1等于2*m个三棱锥的体积累加之和,qn圈和q1圈之间的空间体积vn等于2*m个三棱锥的体积累加之和,由此可以得出室内可视空间体积v=v1+v2+
…
+vn。
35.本实施例优选的所述机座箱体内设有通讯接口4,所述通讯接口4通过通讯天线5或有线网络6连接有上位机,室内空间体积计算工作可由设备控制器3完成,也可以由上位机电脑完成。如果需上位机电脑完成计算工作,则设备控制器3收到激光测距数值s后,即通过通讯接口4上传给上位机电脑。
36.本实施例优选的所述激光雷达14包括激光雷达机座15,所述激光雷达机座15内设有激光雷达旋转扫描机16。,所述激光雷达旋转扫描机16位于驱动电机8的转轴11的轴线方向上,使得激光雷达旋转扫描机16扫描死角为降至最低。
37.本实施例优选的所述光电传感器9至少设有两个且沿转轴11的圆周方向均匀分布。
38.本实施例优选的所述驱动电机8的转轴11通过电机轴连接件12与安装架13连接,可便于安装架的连接。
39.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1