基于人脸识别的室内导航机器人系统及导航方法
1.本发明涉及智能导航技术领域,尤其涉及一种基于人脸识别的室内导航机器人系统及导航方法。
背景技术:
2.随着社会的快速发展,城市的规模也越来越大,为了方便人们快速高效的找到目的地,各式各样的导航软件也随之诞生,目前国际上使用最广泛的是全球导航卫星系统(global navigation satellite system,gnss),能够提供厘米级别的高精度定位,但由于无线电信号在遇到障碍物(如墙壁)会发生大幅衰减和散射,无法提供准确信息,不适用于室内定位,因此要实现准确的室内定位,必须采用适用于室内环境的定位技术,如wifi、蓝牙、蜂窝网络、超宽带等技术。但是wifi、蓝牙以及蜂窝网络等技术又存在信号强度不稳定、定位精度差、部署成本高等缺点。
技术实现要素:
3.针对以上缺点,本发明提出了一种基于人脸识别的室内导航机器人系统,通过人脸识别将来访者与数据库的路线规划进行关联,因为该过程是在机器内部执行,可以解决信号干扰的问题,同时不需要实时定位,直接导出预存的路线,解决了定位精度低的问题,使用的人脸识别芯片成本较低,大量部署成本较低,相较于传统的室内导航机器人,本发明不需要引导客户,避免了机器人碰撞障碍物的问题;传统的导航机器人一次只能为一位客户提供导航,而本发明可以同时为多用户服务,用户无需等待。
4.为了实现上述目的,本发明所提供的一种基于人脸识别的室内导航机器人系统,包括多个导航机器人;
5.多个所述导航机器人分别设置于室内的固定位置进行分阶段导航,每个所述导航机器人之间通过多机通信模块连接;
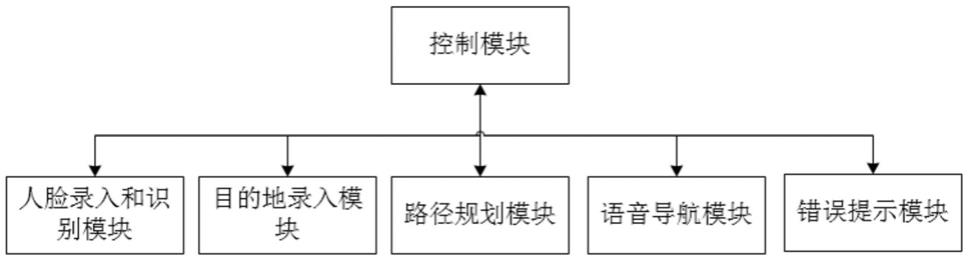
6.每个所述导航机器人包括:控制模块、人脸录入与识别模块、目的地录入模块、语音导航模块、路径规划模块和错误提示模块;
7.所述控制模块分别与所述人脸录入和识别模块、目的地录入模块、语音导航模块、错误提示模块和路径规划模块连接。
8.进一步地,所述人脸录入和识别模块包括m1w k210人脸识别芯片,所述人脸录入和识别模块通过type
‑
c数据线与所述控制模块连接。
9.进一步地,所述目的地录入模块通过触摸显示器输入,所述触摸显示器通过hdmi和c
‑
touch口与所述控制模块有线连接。
10.进一步地,所述语音导航模块是和所述错误提示模块同为外接喇叭输出,所述外接喇叭与所述控制模块的usb有线连接。
11.进一步地,所述路径规划模块包含有地点与地点之间的固定路线的语音文件,所述语音文件输出至所述语音导航模块进行播报。
12.进一步地,所述多机通信模块为m1w k210人脸识别芯片上自带的wifi发射芯片,通过wifi进行不同位置导航机器人的人脸信息的收发。
13.进一步地,所述控制模块基于树莓派实现。
14.此外,为了实现上述目的,本发明还提供了一种基于人脸识别的室内导航机器人系统的导航方法,包括以下步骤:
15.s1、从初始位置处依次对固定位置的导航机器人进行编号,分别为k1,k2,...,kn,n为导航机器人数量;
16.s2、初始位置处,编号为k1的导航机器人录入客户的人脸信息,并接收客户输入的目的地信息,并将所述人脸信息与所述目的地信息进行绑定后传送至其他导航机器人;并根据所述目的地信息播放内置语音文件进行第一阶段导航,客户行进至编号为k
i
(i=1,...,n)的导航机器人;
17.s3、编号为k
i
的导航机器人识别客户的人脸信息,根据所述人脸信息对客户进行下一阶段的语音导航,客户行进至下一阶段的导航机器人;
18.s4、重复步骤s3,直至客户到达目的地。
19.进一步地,当客户在行进的过程中走错了路时,通过寻找最近的导航机器人,导航机器人的人脸录入和识别模块识别到人脸信息后,错误提示模块进行错误提示,并且重新规划到达目的地的最短路线,进行导航。
20.本发明提供的技术方案所带来的有益效果是:
21.1、相对于需要移动的导航机器人,此系统只需在固定的点放置机器人,减少了机器人在引导客户的过程的避障功能部分(需要保证自身不被撞击)以及对于自身位置定位功能部分,大大节省了开发时间与成本。同时,一个移动机器人一般只能引导一个客户,使用效率较低,而本系统不需要移动,能够连续引导客户达到指定位置,只需要较少数量的机器人,并且不会出现让客户等待服务的情况。
22.2、使用人脸识别技术实现对每个来访者进行室内导航,对采集设备的要求不高,采集方式也较为简单。
23.3、采用语音播报的形式,与某些通过app或者小程序发送消息提醒用户的形式更加有效,且用户不需要安装任何app或者添加小程序,为客户提升了使用体验。
24.4、不需要使用wifi、或者摄像头图像分析等技术来实现室内地图构建,而是使用环境确定后由管理员根据使用场景来录制有限确定路线的提示音。
附图说明
25.下面将结合附图及实施例对本发明作进一步说明,附图中:
26.图1是本发明基于人脸识别的室内导航机器人系统的结构图;
27.图2是本发明多个导航机器人进行多机通信的示意图;
28.图3是本发明基于人脸识别的室内导航机器人系统的导航方法的流程图。
具体实施方式
29.为了对本发明的技术特征、目的和效果有更加清楚的理解,现对照附图详细说明本发明的具体实施方式。
30.参考图1,本实施例提供的一种基于人脸识别的室内导航机器人系统,包括多个导航机器人;
31.多个所述导航机器人分别设置于室内的固定位置进行分阶段导航,每个所述导航机器人之间通过多机通信模块通信连接;
32.每个所述导航机器人包括:控制模块、人脸录入与识别模块、目的地录入模块、语音导航模块、路径规划模块和错误提示模块;
33.所述控制模块分别与所述人脸录入和识别模块、目的地录入模块、语音导航模块、错误提示模块和路径规划模块连接。
34.具体地,所述控制模块基于树莓派实现。
35.具体地,所述人脸录入和识别模块包括m1w k210人脸识别芯片,所述人脸录入和识别模块通过type
‑
c数据线与所述控制模块连接。
36.在本实施例中,人脸的录入和识别主要由m1w k210人脸识别芯片、2.8寸lcd显示屏及高清摄像头组成。工作流程:高清摄像头捕捉人脸,将捕捉到的人脸图像传输到m1wk210人脸识别芯片上,芯片通过人脸识别算法将捕捉到的人脸信息发送给控制模块树莓派4b,树莓派生成人脸id与目的地绑定,并执行播放相应的语音文件。
37.具体地,所述目的地录入模块通过触摸显示器输入,所述触摸显示器通过hdmi和c
‑
touch口与所述控制模块有线连接。
38.在本实施例中,目的地录入模块使用树莓派4b连接触摸显示器作为目的地的输入端,输入端提供店名精确查找,模糊查找,按类别查找,按楼层查找等目的地查找方式。
39.具体地,所述语音导航模块是和所述错误提示模块同为外接喇叭输出,所述外接喇叭与所述控制模块的usb有线连接。语音导航模块外接语音控制芯片和功放使其可以对行进路线进行播报。识别出人脸后,通过树莓派4b芯片输出控制信号给语音控制芯片,调取导航语音包进行导航。
40.具体地,所述路径规划模块包含有地点与地点之间的固定路线的语音文件,所述语音文件输出至所述语音导航模块进行播报。
41.具体地,所述多机通信模块为m1w k210人脸识别芯片上自带的wifi发射芯片,通过wifi进行不同位置导航机器人的人脸信息的收发。
42.参考图2,在本实施例中,以三个导航机器人为例,每两个导航机器人之间通过多机通信模块通信,多机通信模块使用maix dock m1w开发板实现,开发板以m1w k210为计算核心,带有wifi无线射频芯片esp8285,可以通过软件编程实现多个开发板的数据传输。
43.此外,基于上述一种基于人脸识别的室内导航机器人系统,本实施例还提供了一种导航方法。
44.参考图3,该方法包括以下步骤:
45.s1、从初始位置处依次对固定位置的导航机器人进行编号,分别为k1,k2,...,kn,n为导航机器人数量;
46.s2、初始位置处,编号为k1的导航机器人录入客户的人脸信息,并接收客户输入的目的地信息,并将所述人脸信息与所述目的地信息进行绑定后传送至其他导航机器人;并根据所述目的地信息播放内置语音文件进行第一阶段导航,客户行进至编号为k
i
(i=1,...,n)的导航机器人;
47.s3、编号为k
i
的导航机器人识别客户的人脸信息,根据所述人脸信息对客户进行下一阶段的语音导航,客户行进至下一阶段的导航机器人;
48.s4、重复步骤s3,直至客户到达目的地。
49.更进一步地,当客户在行进的过程中走错了路时,通过寻找最近的导航机器人,导航机器人的人脸录入和识别模块识别到人脸信息后,错误提示模块进行错误提示,并且重新规划到达目的地的最短路线,进行导航。
50.本发明技术方案的关键点在于:
51.1、将用户输入的目的地信息与人脸识别芯片识别到的人脸信息进行绑定,人脸识别芯片使用深度学习算法,提取人脸信息,生成的人脸信息需要传输到树莓派上的数据库中,并生成相应的人脸id,绑定目的地。
52.2、根据目的地信息,在数据库中搜索导航路径,不同的机器所需要的导航路径不同,需要将机器所在的空间位置做标记,根据其相对于目的地的位置,检索导航信息。
53.3、多个导航机器人之间需要传输人脸和目的地数据,通过m1w k210芯片上的wifi模块可以实现数据互传。
54.需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者系统不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者系统所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括该要素的过程、方法、物品或者系统中还存在另外的相同要素。
55.上述本发明实施例序号仅仅为了描述,不代表实施例的优劣。在列举了若干装置的单元权利要求中,这些装置中的若干个可以是通过同一个硬件项来具体体现。词语第一、第二、以及第三等的使用不表示任何顺序,可将这些词语解释为标识。
56.以上仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1