一种地基雷达组网的系统误差配准方法
1.本发明属于雷达技术领域,涉及一种地基雷达组网存在系统误差条件下的误差配准方法,可用于雷达组网协同目标探测。
背景技术:
2.地基雷达组网是将多部地基雷达统筹组织、优化布局后形成组网结构,收集各雷达的量测信息,并将收集到的信息通过通信链路传输到融合中心进行统一管理、控制和处理,以达到扩大探测范围,提高探测精度,增强系统稳定性等目的。然而各雷达系统误差的存在使得融合中心出现航迹鬼影,即同一个目标在全局坐标系下中产生了多条差异明显的航迹,严重降低了雷达组网的可靠性。地基雷达组网的系统误差包括雷达的姿态角误差和站址误差,姿态角误差包括方位角误差、纵倾角误差以及旋转角误差,其中方位角误差是由于雷达坐标北与真北之间存在对准误差造成的,纵倾角误差是由于雷达天线后倾偏差造成的,旋转角误差是由于雷达天线底座固定倾斜造成的,站址误差是由于gps等位置测量设备不精确造成的。对于地基雷达,系统误差可以认为是固定的。雷达组网系统误差配准的主要任务是,估计并修正雷达的系统误差,使得各雷达上报的目标航迹在融合中心达到空间上的一致。目前已存在多种误差配准方法应用于雷达组网的系统误差配准。但是,由于待估计的系统误差参数较多的因素,使得低时间复杂度的误差配准仍是一个挑战。
3.例如授权公告号为cn105353359b,名称为“异步组网雷达系统误差校正方法”的中国专利,公开了一种异步组网雷达系统误差校正的方法,该方法首先将各雷达的航迹转换到公共坐标系下,然后建立系统误差估计模型,再利用序贯最小二乘估计方法,对包括待配准雷达的姿态角误差和站址误差六个维度的系统误差进行联合估计和校正。该方法解决了异步观测条件下组网雷达系统误差校正问题,但其存在的不足之处是,对系统误差联合估计带来矩阵求逆维度较高的问题,使得时间复杂度较高,不利于工程应用。
技术实现要素:
4.本发明的目的是针对上述现有技术的不足,提出一种地基雷达组网的系统误差配准方法,旨在在保证配准精度的前提下,降低系统误差估计过程中因矩阵求逆维度高导致的时间复杂度。
5.为实现上述目的,本发明采取的技术方案包括如下步骤:
6.(1)获取雷达的姿态角以及目标航迹:
7.(1a)初始化包括一个参考雷达s0以及n个待配准雷达s={s
n
|1≤n≤n}的雷达组网场景,每个雷达通过惯性测量单元获取东北天坐标系下自身的姿态角,得到参考雷达s0的姿态角p0=(ψ0,η0,φ0)
t
、每个待配准雷达s
n
的姿态角p
n
=(ψ
n
,η
n
,φ
n
)
t
,则待配准雷达s对应的姿态角集合为p={p
n
|1≤n≤n},其中n≥1,ψ0、η0、φ0分别表示参考雷达s0的姿态角中雷达天线相对于正北方向的方位角、相对于水平面的纵倾角、相对于法向的旋转角,ψ
n
、η
n
、φ
n
分别表示第n个待配准雷达s
n
中雷达天线相对于正北方向的方位角、相对于水平面的纵倾
角、相对于法向的旋转角;
8.(1b)参考雷达s0在极坐标系o0下、每个待配准雷达s
n
在极坐标系o
n
下对同一运动目标a进行量测,并分别对量测得到的目标点迹依次进行滤波和时间插值,得到参考雷达s0在极坐标系o0下的目标航迹以及待配准雷达s在极坐标系o
n
下的目标航迹集合k表示目标航迹的帧数,k≥2,表示中的第k帧坐标数据,r
0,k
、θ
0,k
、分别表示目标a相对于s0在极坐标系o0下的斜距、方位角以及俯仰角,表示待配准雷达s
n
的目标航迹,表示中的第k帧坐标数据r
n,k
、θ
n,k
、分别表示目标a相对于s
n
在极坐标系o
n
下的斜距、方位角以及俯仰角;
9.(2)将目标航迹转换到东北天坐标系下:
10.(2a)将参考雷达s0的目标航迹转换到直角坐标系l0下,得到s0在直角坐标系l0下的目标航迹x
0,k
、y
0,k
、z
0,k
分别表示目标a相对于s0在直角坐标系l0三个坐标轴上的投影,同时将每个待配准雷达s
n
的目标航迹转换到直角坐标系l
n
下,得到s
n
在直角坐标系l
n
下的目标航迹下的目标航迹x
n,k
、y
n,k
、z
n,k
分别表示目标a相对于s
n
在直角坐标系l
n
三个坐标轴上的投影;
11.(2b)根据参考雷达s0的姿态角p0,计算由直角坐标系l0到东北天坐标系e0的旋转矩阵r0,同时根据第n个待配准雷达s
n
的姿态角p
n
,计算由直角坐标系l
n
到东北天坐标系e
n
的旋转矩阵r
n
;
12.(2c)利用r0将转换到东北天坐标系e0下,得到s0在东北天坐标系e0下的目标航迹利用r
n
将转化到东北天坐标系e
n
下,得到待配准雷达s东北天坐标系e
n
下的目标航迹集合下的目标航迹集合其中表示中的第k帧坐标数据,表示s
n
在东北天坐标系e
n
下的目标航迹,表示中的第k帧坐标数据;
13.(3)对东北天坐标系下的目标航迹进行差分运算:
14.对参考雷达s0在东北天坐标系下e0下的目标航迹进行差分运算,得到s0对应的差分数据同时对每个待配准雷达s
n
在东北天坐标系e
n
下的目标航迹进行差分运算,得到s对应的差分数据集合进行差分运算,得到s对应的差分数据集合其中表示中的第j个差分数据,
表示中的第j个差分数据,x
n,j
、y
n,j
、z
n,j
分别表示在e
n
下东、北、天坐标轴上的投影,(
·
)
t
表示转置操作;
15.(4)对待配准雷达的姿态角误差进行估计:
16.(4a)利用每个待配准雷达s
n
对应的差分数据构造s
n
的姿态角误差系数矩阵b
n
:
[0017][0018][0019]
(4b)利用参考雷达s0对应的差分数据和每个待配准雷达s
n
对应的差分数据构造s
n
的伪观测量y
n
:
[0020][0021]
(4c)采用最小二乘方法,并通过姿态角误差系数矩阵b
n
和伪观测量y
n
对每个待配准雷达s
n
的姿态角误差dp
n
进行估计,得到待配准雷达s对应的姿态角误差集合dp={dp
n
|1≤n≤n},
[0022]
(5)对待配准雷达的站址误差进行估计:
[0023]
(5a)通过每个待配准雷达s
n
的姿态角误差dp
n
对姿态角p
n
进行修正,并通过p
n
的修正值计算旋转矩阵然后通过和东北天坐标系e
n
下第k帧坐标数据计算s
n
东北天坐标系e
n
下目标航迹修正值得到姿态角误差修正后待配准雷达s
n
对应的目标航迹其中表示中第k帧坐标数据;
[0024]
(5b)通过东北天坐标系e0下参考雷达s0的目标航迹和每个待配准雷达s
n
姿态角误差修正后的目标航迹计算s
n
的站址误差dz
n
,得到待配准雷达s对应的站址误差集合dz={dz
n
|1≤n≤n},其中dz
n
的计算公式为:
[0025][0026]
(6)获取雷达组网的系统误差配准结果:
[0027]
通过每个待配准雷达s
n
的站址误差dz
n
,以及s
n
姿态角修正后对应的目标航迹中的每帧坐标数
据计算系统误差修正后s
n
对应的目标航迹中的每帧坐标数据得到s
n
系统误差配准结果则待配准雷达s对应的系统误差配准结果
[0028]
本发明与现有技术相比,具有如下优点:
[0029]
本发明在获取雷达组网的系统误差配准结果的过程中,首先对参考雷达以及每个待配准雷达在各自的东北天坐标系目标航迹进行差分运算,然后利用参考雷达对应的差分数据和每个待配准雷达对应的差分数据构造伪观测量,再通过姿态角误差系数矩阵和伪观测量对每个待配准雷达的姿态角误差进行估计,最后对待配准雷达的站址误差进行估计,使得系统误差中的姿态角误差和站址误差分离,实现了将一个六维参数估计问题分解为两个三维参数估计问题,避免了现有技术中系统误差联合估计带来矩阵求逆维度高的问题,时间复杂度由o(63)降低到了o(33),更适合于工程应用。
附图说明
[0030]
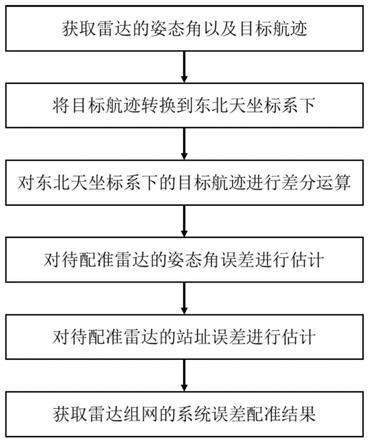
图1为本发明的实现流程图;
[0031]
图2为本发明与现有技术配准精度的仿真对比图。
具体实施方式
[0032]
以下结合附图和具体实施例,对本发明作进一步详细描述。
[0033]
参照图1,本发明包括如下步骤:
[0034]
步骤1)获取雷达的姿态角以及目标航迹:
[0035]
步骤1a)初始化包括一个参考雷达s0以及n个待配准雷达s={s
n
|1≤n≤n}的雷达组网场景,每个雷达通过惯性测量单元获取东北天坐标系下自身的姿态角,得到参考雷达s0的姿态角p0=(ψ0,η0,φ0)
t
、每个待配准雷达s
n
的姿态角p
n
=(ψ
n
,η
n
,φ
n
)
t
,则待配准雷达s对应的姿态角集合为p={p
n
|1≤n≤n},其中n≥1,ψ0、η0、φ0分别表示参考雷达s0的姿态角中雷达天线相对于正北方向的方位角、相对于水平面的纵倾角、相对于法向的旋转角,ψ
n
、η
n
、φ
n
分别表示第n个待配准雷达s
n
中雷达天线相对于正北方向的方位角、相对于水平面的纵倾角、相对于法向的旋转角,在本实施例中n=2。
[0036]
在配准过程中,假设参考雷达的系统误差为零,估计并校正所有待配准雷达相对于参考雷达的系统误差,使得待配准雷达的目标航迹相对于参考雷达的目标航迹达到空间一致,以实现雷达组网的系统误差配准。
[0037]
步骤1b)参考雷达s0在极坐标系o0下、每个待配准雷达s
n
在极坐标系o
n
下对同一运动目标a进行量测,并分别对量测得到的目标点迹依次进行滤波和时间插值,得到参考雷达s0在极坐标系o0下的目标航迹以及待配准雷达s在极坐标系o
n
下的目标航迹集合k表示目标航迹的帧数,k≥2,表示中的第k帧坐标数据,r
0,k
、θ
0,k
、分别表示目标a相对于
s0在极坐标系o0下的斜距、方位角以及俯仰角,表示待配准雷达s
n
的目标航迹,表示中的第k帧坐标数据r
n,k
、θ
n,k
、分别表示目标a相对于s
n
在极坐标系o
n
下的斜距、方位角以及俯仰角,在本实施例中,目标航迹帧数k=100,运动目标a做匀加速运动。
[0038]
雷达组网系统中,由于每个雷达直接对运动目标量测获得的点迹信息中包含许多由噪声产生的虚假点迹,融合中心首先需要对其进行滤波操作,过滤掉虚假点迹。同时由于各雷达的数据率不一致,融合中心需要对滤波后的各站点迹进行时间插值操作,获得同步的目标航迹信息。
[0039]
步骤2)将目标航迹转换到东北天坐标系下:
[0040]
步骤2a)将参考雷达s0的目标航迹转换到直角坐标系l0下,得到s0在直角坐标系l0下的目标航迹x
0,k
、y
0,k
、z
0,k
分别表示目标a相对于s0在直角坐标系l0三个坐标轴上的投影,同时将每个待配准雷达s
n
的目标航迹转换到直角坐标系l
n
下,得到s
n
在直角坐标系l
n
下的目标航迹x
n,k
、y
n,k
、z
n,k
分别表示目标a相对于s
n
在直角坐标系l
n
三个坐标轴上的投影。通过参考雷达s0在极坐标系o0下目标航迹中的第k帧坐标数据计算参考雷达s0在直角坐标系l0下的目标航迹中的第k帧坐标数据其中x
0,k
、y
0,k
、z
0,k
的计算公式为:
[0041][0042]
计算待配准雷达s
n
在直角坐标系l
n
下的目标航迹中第k帧坐标数据的方法与计算计算参考雷达s0在直角坐标系l0下的目标航迹中的第k帧坐标数据的方法相同。
[0043]
雷达极坐标系是以雷达天线为原点,x轴与雷达天线阵面横向平行,y轴与雷达天线阵面的法线方向平行,z轴与雷达天线阵面的纵向平行的局部坐标系,目标的斜距、方位角以及俯仰角均是在各雷达对应的极坐标系中测量得到。在雷达组网系统中,为了实现对所有雷达数据进行融合,必须将各雷达在其局部坐标系中的量测数据转换到某统一的全局坐标系当中。以参考雷达为原点,x轴指向东方向,y轴指向北方向,z轴指向正上方建立的东北天坐标系e0作为全局坐标系。
[0044]
步骤2b)根据参考雷达s0的姿态角p0,计算由直角坐标系l0到东北天坐标系e0的旋转矩阵r0,同时根据第n个待配准雷达s
n
的姿态角p
n
,计算由直角坐标系l
n
到东北天坐标系e
n
的旋转矩阵r
n
,r0的计算公式为:
[0045][0046]
计算r
n
的方法与计算r0的方法相同。
[0047]
步骤2c)利用r0将转换到东北天坐标系e0下,得到s0在东北天坐标系e0下的目标航迹利用r
n
将转化到东北天坐标系e
n
下,得到待配准雷达s东北天坐标系e
n
下的目标航迹集合下的目标航迹集合其中表示中的第k帧坐标数据,表示s
n
在东北天坐标系e
n
下的目标航迹,表示中的第k帧坐标数据。
[0048]
步骤3)对东北天坐标系下的目标航迹进行差分运算:
[0049]
对参考雷达s0在东北天坐标系下e0下的目标航迹进行差分运算,得到s0对应的差分数据同时对每个待配准雷达s
n
在东北天坐标系e
n
下的目标航迹进行差分运算,得到s对应的差分数据集合进行差分运算,得到s对应的差分数据集合其中表示中的第j个差分数据,中的第j个差分数据,表示中的第j个差分数据,x
n,j
、y
n,j
、z
n,j
分别表示在e
n
下东、北、天坐标轴上的投影,(
·
)
t
表示转置操作。
[0050]
全局坐标系e0下,根据待配准雷达s
n
旋转角误差dp
n
以及站址误差dz
n
,建立待配准雷达和参考站雷达各自目标航迹中的第j帧坐标数据对应的误差配准方程第j+1帧坐标数据对应的误差配准方程对相邻两帧坐标数据进行差分运算,配准方程变为即可以看到,对东北天坐标系下的目标航迹进行差分运算后,各雷达对应的差分数据与站址误差dz
n
无关,便于在步骤4)和步骤5)中对姿态角误差和站址误差进行单独估计。其中,dr
n
表示由待配准雷达s
n
的旋转角误差dp
n
=(dψ
n
,dη
n
,dφ
n
)
t
计算的旋转矩阵,dψ
n
、dη
n
、dφ
n
分别表示s
n
相对于正北方向的方位角误差、相对于水平面的纵倾角误差、相对于法向的旋转角误差,dr
n
的计算公式如下:
[0051][0052]
步骤4)对待配准雷达的姿态角误差进行估计:
[0053]
步骤4a)利用每个待配准雷达s
n
对应的差分数据构造s
n
的姿态角误差系数矩阵b
n
:
[0054][0055][0056]
将dr
n
以及的表达式代入到待配准雷达s
n
第j个差分数据对应的误差配准方程中,展开得到第j个伪观测方程:
[0057]
步骤4b)利用参考雷达s0对应的差分数据和每个待配准雷达s
n
对应的差分数据构造s
n
的伪观测量y
n
,其中dp
n
表示待配准雷达s
n
的姿态角误差,y
n
的计算公式:
[0058][0059]
将待配准雷达s
n
的n
‑
1个差分数据对应的伪观测方程联立得到伪观测方程组y
n
=b
n
dp
n
。
[0060]
步骤4c)采用最小二乘方法,并通过姿态角误差系数矩阵b
n
和伪观测量y
n
对每个待配准雷达s
n
的姿态角误差dp
n
进行估计,得到待配准雷达s对应的姿态角误差集合dp={dp
n
|1≤n≤n},
[0061]
其中姿态角误差dp
n
的维度为三维,通过伪观测方程组求解姿态角误差是一个三维参数估计问题,其时间复杂度为o(33)。
[0062]
步骤5)对待配准雷达的站址误差进行估计:
[0063]
步骤5a)通过每个待配准雷达s
n
的姿态角误差dp
n
对姿态角p
n
进行修正,并通过p
n
的修正值计算旋转矩阵然后通过和东北天坐标系e
n
下第k帧坐标数据计算s
n
东北天坐标系e
n
下目标航迹修正值得到姿态角误差修正后待配准雷达s
n
对应的目标航迹其中表示中第k帧坐标数据。
[0064]
计算的方法与计算r0的方法相同。姿态角误差修正后,待配准雷达s
n
对应的目标航迹与参考雷达s0对应的目标航迹之间的差异值仅由站址误差造成,即通过步骤5b)对差异值求平均来估计站址误差。
[0065]
步骤5b)通过东北天坐标系e0下参考雷达s0的目标航迹和每个待配准雷达s
n
姿态角误差修正后的目标航迹计算s
n
的站址误差dz
n
,得到待配准雷达s对应的站址误差集合dz={dz
n
|1≤n≤n},其中dz
n
的计算公式为:
[0066]
[0067]
步骤6)获取雷达组网的系统误差配准结果:
[0068]
通过每个待配准雷达s
n
的站址误差dz
n
,以及s
n
姿态角修正后对应的目标航迹中的每帧坐标数据计算系统误差修正后s
n
对应的目标航迹中的每帧坐标数据得到s
n
系统误差配准结果则待配准雷达s对应的系统误差配准结果
[0069]
下面结合仿真实验对本发明的技术效果作进一步说明。
[0070]
1.仿真条件和内容:
[0071]
仿真实验的硬件测试平台是:处理器为cpu intel core i5
‑
8250u,主频为1.6ghz,内存8gb。
[0072]
仿真实验的软件平台为:matlab r2020a。
[0073]
仿真实验条件:三个地基雷达组网,包括一个参考雷达s0和两个待配准雷达,待配准雷达s1的站址误差为(300,300,100)m,姿态角误差(0.5
°
,
‑
0.5
°
,0.3
°
);待配准雷达s2的站址误差为(
‑
300,200,100)m,姿态角误差(
‑
0.3
°
,0.5
°
,0.2
°
);观测目标在三维空间中做匀加速运动,三个雷达站将对此目标量测得到的点迹数据传输至融合中心,依次经过滤波和插值得到时间同步的目标航迹,航迹数据帧数k=100。
[0074]
对本发明与现有的异步组网雷达系统误差校正方法的配准精度进行对比仿真,其结果如图2所示。
[0075]
2.仿真结果分析:
[0076]
参照图2,横坐标表示航迹的帧数,纵坐标表示平均配准误差,单位为米m。平均配准误差用来表示配准的精度,平均配准误差越小,配准的精度越高。图2中以实线标示的曲线表示本发明对应的平均配准误差,以虚线标示的曲线表示现有技术对应的平均配准误差。当航迹帧数k<20时,本发明对应的平均配准误差小于现有技术对应的平均配准误差,当航迹帧数k≥20时,本发明对应的平均配准误差与现有技术对应的平均配准误差接近,表明本发明与现有技术在配准精度上相当。所以本发明相对于现有技术在降低了时间复杂度的同时保证了配准精度,更适合于工程应用。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1