校准方法与流程
1.本发明涉及校准方法。
背景技术:
2.坐标测量设备作为用于测量待测量物体的尺寸和几何形状的测量装置而被人熟知。
3.使用诸如球板(ball plate)等的基准仪器来校准该坐标测量设备,以维持测量的精度(例如,参见日本专利4,584,029)。
技术实现要素:
4.发明要解决的问题
5.球板上的多个基准球是按预定间隔布置的。可设想使用坐标测量设备来校准基准球之间的间隔。然而,由于在坐标测量设备中存在尺度误差,因此存在当使用坐标测量设备测量球板的多个基准球之间的间隔时不能以高精度测量该间隔的问题。
6.本发明集中于这些点,并且本发明的目的是提高对基准仪器进行校准的精度。
7.用于解决问题的方案
8.根据本发明的第一方面的校准方法是如下的校准方法,其用于利用坐标测量设备校准基准仪器中的多个待测量物体之间的间隔,所述校准方法包括以下步骤:将用于测量所述坐标测量设备的尺度误差的待测量结构放置在所述尺度误差的测量方向上的第一位置处,所述待测量结构包括待测量体和连接至所述待测量体的反射体;在所述待测量结构在所述第一位置处的状态下,通过使激光干涉仪在所述测量方向上用激光束照射所述反射体来测量从所述激光干涉仪到所述反射体的第一距离,并且利用所述坐标测量设备测量所述待测量体在所述测量方向上的第一坐标;使所述待测量结构沿所述测量方向移动到不同于所述第一位置的第二位置;在所述待测量结构在所述第二位置处的状态下,通过使所述激光干涉仪在所述测量方向上用激光束照射所述反射体来测量从所述激光干涉仪到所述反射体的第二距离,并且使用所述坐标测量设备测量所述待测量体在所述测量方向上的第二坐标;通过将(i)所述第一距离和所述第二距离之间的差与(ii)所述第一坐标和所述第二坐标之间的差进行比较,来确定所述坐标测量设备的尺度误差;放置所述基准仪器,使得所述多个待测量物体位于所述坐标测量设备的所述测量方向上;在放置所述基准仪器之后,利用所述坐标测量设备测量所述多个待测量物体之间的间隔;以及通过利用所述尺度误差校正所述坐标测量设备的测量所述基准仪器的所述多个待测量物体之间的间隔的结果,来计算所述多个待测量物体之间的间隔的校准值。
9.在所述第一坐标的测量中,所述坐标测量设备可以测量所述待测量体上的多个位置的多个坐标,并且基于所测量的多个坐标来指定指示所述待测量体的预定位置的所述第一坐标。
10.在所述待测量结构的移动中,可以使所述待测量结构移动与所述多个待测量物体
之间的间隔的规格值相对应的距离。
11.在所述待测量结构的移动中,可以使所述待测量结构沿着长边方向与所述测量方向一致的导轨移动。
12.在所述待测量结构的移动中,可以使所述待测量结构沿着长边方向与所述测量方向一致的所述导轨移动与所述多个待测量物体之间的间隔的规格值相对应的距离。
13.在所述基准仪器的放置中,可以将所述基准仪器放置在放置所述待测量结构的位置处。
14.在所述基准仪器的放置中,可以将所述基准仪器放置成使得所述多个待测量物体位于所述第一位置和所述第二位置。
15.在所述基准仪器的放置中,可以将所述基准仪器放置在台座的上表面上,所述台座放置在放置所述待测量结构的位置处。
16.在利用所述坐标测量设备测量所述多个待测量物体之间的间隔时,可以将分别接触所述多个待测量物体的多个开口(aperture)的位置之间的间隔确定为所述待测量物体之间的间隔。
17.根据本发明的第二方面的校准方法是如下校准方法,其用于利用坐标测量设备校准基准仪器中的多个待测量物体之间的间隔,所述校准方法包括以下步骤:将用于测量所述坐标测量设备的尺度误差的待测量结构放置在所述尺度误差的测量方向上的第一位置处,所述待测量结构包括待测量部分和反射所发射的激光束的反射部分;在所述待测量结构在所述第一位置处的状态下,通过使激光干涉仪在所述测量方向上用激光束照射所述反射部分来测量从所述激光干涉仪到所述反射部分的第一距离,并且利用所述坐标测量设备测量所述待测量部分在所述测量方向上的第一坐标;使所述待测量结构沿所述测量方向移动到不同于所述第一位置的第二位置;在所述待测量结构在所述第二位置处的状态下,通过使所述激光干涉仪在所述测量方向上用激光束照射所述反射部分来测量从所述激光干涉仪到所述反射部分的第二距离,并且使用所述坐标测量设备测量所述待测量部分在所述测量方向上的第二坐标;通过将(i)所述第一距离和所述第二距离之间的差与(ii)所述第一坐标和所述第二坐标之间的差进行比较,来确定所述坐标测量设备的尺度误差;放置所述基准仪器,使得所述多个待测量物体位于所述坐标测量设备的所述测量方向上;在放置所述基准仪器之后,利用所述坐标测量设备测量所述多个待测量物体之间的间隔;以及通过利用所述尺度误差校正所述坐标测量设备的测量所述基准仪器的所述多个待测量物体之间的间隔的结果,来计算所述多个待测量物体之间的间隔的校准值。
18.发明的效果
19.根据本发明,可以提高对基准仪器进行校准的精度。
附图说明
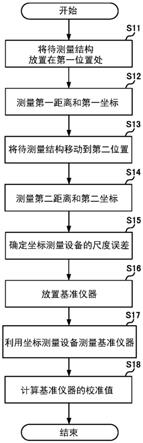
20.图1是示出根据本实施例的用于校准基准仪器的多个基准球之间的间隔的方法的流程图。
21.图2是用于说明用于确定坐标测量设备s的尺度误差的方法的图。
22.图3是用于说明用于测量球板p中所包括的多个基准球之间的间隔的方法的图。
23.图4是用于说明待测量体14的几何形状的另一示例的图。
24.图5是用于说明待测量体14和反射体15的几何形状的另一示例的图。
具体实施方式
25.《校准方法的概述》
26.该校准方法是用于利用坐标测量设备(即,坐标测量机)校准基准仪器中的多个待测量物体之间的间隔的方法。多个待测量物体例如是球板中所包括的多个基准球或球板中所包括的多个开口。本校准方法i)确定用于测量多个待测量物体的坐标测量设备的尺度误差,并且ii)基于所确定的坐标测量设备的尺度误差和由坐标测量设备测量到的多个待测量物体之间的间隔来校准基准仪器中所包括的多个待测量物体之间的间隔。在本实施例中,作为示例,将说明用于校准球板中所包括的多个基准球中的两个基准球之间的间隔的方法。
27.《校准方法的流程图》
28.图1是示出根据本实施例的用于校准基准仪器的多个基准球之间的间隔的方法的流程图。图2是用于说明用于确定坐标测量设备s的尺度误差的方法的图。图3是用于说明用于测量球板p中所包括的多个基准球之间的间隔的方法的图。
29.图2示出用于测量坐标测量设备s的尺度误差的工具(即,导轨12、滑块13、待测量体14、反射体15和激光干涉仪16)放置在坐标测量设备s的面板面10上的状态。在本校准方法中,通过以下来校准多个基准球之间的间隔:a)使用图2所示的工具以及坐标测量设备s的探测器11来进行测量以确定尺度误差;然后b)如图3所示,将球板p放置在面板面10上,并测量球板p中所包括的多个基准球之间的间隔。用于确定尺度误差的计算例如由计算机(未示出)来进行。
30.面板面10是坐标测量设备s中所包括的面板的表面。探测器11是坐标测量设备s中所包括的探测器。导轨12是放置在面板面10上的长方体物体。
31.滑块13、待测量体14和反射体15包括在待测量结构中,该待测量结构的移动距离由坐标测量设备s和激光干涉仪16各自进行测量以测量尺度误差。滑块13与待测量体14和反射体15结合,并且在导轨12的上表面上移动。待测量体14是由使探测器11接触待测量体14的坐标测量设备s测量位置的物体,并且例如包括球形部分。反射体15是回射由激光干涉仪16发射的激光的物体,并且包括面向激光干涉仪16的平坦面。激光干涉仪16通过用激光束照射反射体15来测量激光干涉仪16和反射体15之间的距离。图3所示的台座17是放置球板p的台座。
32.以下将根据图1所示的流程图来说明校准方法的过程。
33.在第一步骤中,在如图2所示、工具放置在面板面10上的状态下,将滑块13放置在作为导轨12的上表面上的位置的第一位置处(步骤s11)。具体地,将包括用于测量坐标测量设备s的尺度误差的待测量体14和连接至待测量体14的反射体15的待测量结构放置在尺度误差的测量方向上的第一位置处。测量方向与导轨12的长边方向一致。待测量结构的位置是待测量结构中所包括的滑块13、待测量体14和反射体15这些部分中的任一部分的位置,并且例如是待测量体14中所包括的球体的中心位置。
34.在接下来的步骤中,在待测量结构处于第一位置的状态下,激光干涉仪16测量第一距离,并且坐标测量设备s测量第一坐标(步骤s12)。具体地,激光干涉仪16通过在测量方
向上用激光束照射反射体15来测量从激光干涉仪16到反射体15的第一距离。坐标测量设备s测量待测量结构在测量方向上的第一坐标。进行利用激光干涉仪16的第一距离的测量和利用坐标测量设备s的第一坐标的测量的顺序是任意的。
35.如图2所示,激光干涉仪16被放置成使得激光干涉仪16所发射的激光束的方向与导轨12的长边方向一致。激光干涉仪16被放置成使得待测量体14的一端处的球体的中心和反射体15的一端处的回射器的中心位于激光干涉仪所发出的激光束的光轴上。这样,根据本校准方法的测量受阿贝误差的影响可以较小。
36.坐标测量设备s测量与探测器11所接触的待测量体14上的位置相对应的坐标。坐标测量设备s测量待测量体14上的多个位置的多个坐标,以例如提高对测量方向上的位置进行测量的精度,并且基于所测量的这多个坐标来指定指示待测量体14的预定位置的第一坐标。例如,当待测量体14是球体时,坐标测量设备s测量待测量体14的表面上的多个位置的坐标。然后,坐标测量设备s确定为与多个位置等距的位置的坐标是指示待测量体14的中心位置的第一坐标。
37.坐标测量设备s以这种方式基于多个坐标来测量待测量体14的位置的坐标,由此抑制由于探测器11所接触的待测量体14上的位置之间的差异而引起的测量误差。
38.在接下来的步骤中,在测量第一距离和第一坐标之后,使待测量结构沿测量方向移动到与第一位置不同的第二位置(步骤s13)。具体地,使滑块13沿着导轨12移动到第二位置。第二位置例如是通过使待测量结构从第一位置起沿着导轨12移动与多个待测量物体之间的间隔的规格值相对应的距离所获得的位置。具体地,第二位置是沿着导轨12的长边方向与第一位置分开了与球板p中所包括的基准球a1和a2之间的距离相同的距离的位置。
39.通过这样使用接近待校准物体的规格值的距离作为第一位置和第二位置之间的距离,增加了本校准方法中测量用于校准球板p的坐标测量设备s的测量范围中的尺度误差的精度。此外,由于滑块13被配置为沿着导轨12的长边方向移动,因此本校准方法可以确定任意的第一位置和第二位置之间的尺度误差。结果,本校准方法可以适应多个基准仪器中所包括的多个待测量物体之间的不同间隔中的各间隔。
40.在接下来的步骤中,在待测量结构在第二位置处的状态下,激光干涉仪16测量第二距离,并且坐标测量设备s测量第二坐标(步骤s14)。具体地,激光干涉仪16通过在测量方向上用激光束照射反射体15来测量从激光干涉仪16到反射体15的第二距离,并且坐标测量设备s测量待测量结构在测量方向上的第二坐标。
41.在接下来的步骤中,确定坐标测量设备s的尺度误差(步骤s15)。例如使用计算机通过将a)第一距离和第二距离之间的差与b)第一坐标和第二坐标之间的差进行比较来确定坐标测量设备s的尺度误差。例如,如果第一距离和第二距离之间的差是“300mm+1μm”、并且与第一坐标和第二坐标之间的差相对应的距离是“300mm”,则坐标测量设备s的尺度误差被确定为
“‑
1μm”。
42.在通过上述过程确定坐标测量设备s的尺度误差之后,将用于测量尺度误差的工具从面板面10移除,并且尺度误差已被确定的坐标测量设备s测量面板面10上所放置的球板p中包括的多个基准球a1和a2之间的间隔。接着,基于所测量的间隔和所确定的坐标测量设备s的尺度误差来计算基准球a1和基准球a2之间的间隔的校准值。
43.在接下来的步骤中,为了测量作为基准仪器的球板p中所包括的多个基准球a1和
a2之间的间隔,球板p被放置成使得多个基准球a1和a2位于测量方向(导轨12的长边方向)上(步骤s16)。具体地,将球板p放置在放置待测量结构的位置处。更具体地,将球板p放置在面板面10上,使得作为多个待测量物体的多个基准球a1和a2位于第一位置和第二位置。
44.在图3所示的球板p中,作为待测量物体的基准球a1和a2具有圆形外周。此外,球板p包括与基准球a1和a2各自邻接的多个开口。在这种情况下,球板p被放置成使得基准球a1和基准球a2位于第一位置和第二位置处或者在第一位置和第二位置附近。在图3中,例如,基准球a1对应于第一位置,并且基准球a2对应于第二位置。通过这样放置球板p,测量尺度误差的位置和球板p上的待测量位置基本上一致,并且校准的精度得以提高。
45.当将球板p放置在面板面10上时,如图3所示,球板p可以放置在面板面10的上表面上所放置的台座17的上表面上。台座17例如放置于在步骤s11和步骤s13至少之一中放置待测量结构的位置处。将球板p放置在台座17的上表面上例如允许将探测器11所接触的球板p上的位置的高度调整为等于待测量体14的中心位置。通过进行这样的调整,可以在与测量坐标测量设备s的尺度误差时相同的条件下测量球板p,并且校准的精度得以进一步提高。
46.在接下来的步骤中,利用坐标测量设备s测量基准仪器(步骤s17)。在本实施例中,利用坐标测量设备s测量对作为基准仪器的球板p所设置的作为多个待测量物体的多个基准球a1和a2之间的间隔。具体地,坐标测量设备s测量基准球a1的坐标和基准球a2的坐标,并确定与所测量的坐标之间的差相对应的间隔。
47.在接下来的步骤中,计算基准仪器的校准值(步骤s18)。具体地,利用在步骤s15中确定的坐标测量设备s的尺度误差来校正利用坐标测量设备s测量作为待测量物体的多个基准球a1和a2之间的间隔的结果,以计算作为基准仪器的球板p上的多个基准球a1和a2之间的间隔的校准值。例如,如果测量基准球a1和基准球a2之间的间隔的结果是“300mm+2μm”、并且坐标测量设备s的尺度误差是
“‑
1μm”,则利用尺度误差校正后的测量间隔的值是“300mm+3μm”。在这种情况下,当基准球a1和a2之间的间隔的规格值是“300mm”时,校准值可被计算为“3μm”。
48.应当注意,在上述说明中测量图3所示的球板p中所包括的作为待测量物体的基准球a1和a2之间的间隔,但基准仪器不限于图3所示的球板p的形式。基准仪器例如可以是具有三棱锥形状或长方体形状的基准仪器,其中待测量物体设置在该三棱锥形状或长方体形状的顶点中的一些顶点处。此外,基准仪器例如可以是包括按行或格子形状设置的多个待测量物体的基准仪器。在这种情况下,坐标测量设备s针对多个待测量物体中的各待测量物体,通过测量这些待测量物体与其邻接的待测量物体之间的间隔来计算多个校准值。
49.《第一变形例》
50.在上述说明中,说明了在利用坐标测量设备s要测量的待测量体14的一端处形成球体的情况,但利用坐标测量设备s要测量的待测量体14的一端的几何形状不限于球体。图4是用于说明待测量体14的几何形状的另一示例的图。图4的(a)示出待测量体14的一端是环状圆柱体的示例。图4的(b)示出待测量体14的一端具有块形状(长方体)的示例。
51.在图4的(a)中,坐标测量设备s通过使探测器11接触待测量体14中所包括的环状圆柱体的内周或外周来测量第一坐标和第二坐标。在图4的(b)中,坐标测量设备s通过使探测器11接触作为待测量体14中所包括的块的表面的多个平面来测量第一坐标和第二坐标。因此,通过测量不同于球体的待测量体14的一端的几何形状,坐标测量设备s可以进行由于
探测器11所接触的位置的差异而引起的测量误差得到抑制的测量。
52.《第二变形例》
53.在上述说明中,待测量体14和反射体15是不同的物体,但待测量体14和反射体15可以是单个物体。图5是用于说明待测量体14和反射体15的几何形状的另一示例的图。图5与图2的不同之处在于,待测量体14被待测量部分18代替且反射体15被反射部分19代替,并且图5与图2在其它方面相同。
54.图5中的待测量结构包括滑块13、待测量部分18和反射部分19。待测量部分18和反射部分19彼此联接。待测量部分18是由使探测器11接触待测量部分18的坐标测量设备s测量位置的部分,并且例如是球体。反射部分19是回射激光干涉仪16所发射的激光的部分。
55.当使用图5所示的待测量结构进行本校准方法时,坐标测量设备s通过使探测器11接触待测量部分18来测量待测量结构在测量方向上的第一坐标和第二坐标。激光干涉仪16通过在测量方向上用激光束照射反射部分19来测量从激光干涉仪16到反射部分19的第一距离和第二距离。
56.通过这样的结构,坐标测量设备s和激光干涉仪16可以测量相同位置处的待测量物体,并且测量尺度误差的精度得以进一步提高。此外,可以简化待测量结构的结构。
57.《第三变形例》
58.以上说明例示了在放置基准仪器的步骤中、第一坐标和第二坐标之间的差与基准球a1和a2之间的间隔相同或彼此接近的情况,但第一坐标和第二坐标之间的差与基准球a1和a2之间的间隔可以是不同的。
59.在这种情况下,将用于确定坐标测量设备s的尺度误差的第一坐标和第二坐标之间的差与基准球a1和a2之间的间隔进行比较,以计算基准球a1和a2之间的间隔相对于第一坐标和第二坐标之间的差的比例量。然后,基于所计算出的比例量和所确定的坐标测量设备s的尺度误差来确定基准球a1和a2之间的间隔的校准值。
60.例如,在与第一坐标和第二坐标之间的差相对应的距离是“300mm”并且尺度误差是
“‑
1μm”的情况下,如果基准球a1和a2之间的间隔是“600mm”,则以尺度误差为
“‑
2μm”计算校准值。通过以这种方式计算校准值,即使当例如基准球a1和a2之间的间隔比导轨12的长边方向上的距离长时,校准方法也可以计算校准值。
61.《第四变形例》
62.在上述说明中,通过在确定坐标测量设备s的尺度误差之后测量基准球a1和a2之间的间隔来计算基准球a1和a2之间的间隔的校准值,但可以通过在测量基准球a1和a2之间的间隔之后确定坐标测量设备s的尺度误差来计算基准球a1和a2之间的间隔的校准值。
63.具体地,首先,通过进行图1所示的从步骤s16到步骤s17的过程来测量球板p中所包括的基准球a1和基准球a2之间的间隔。随后,通过进行图1所示的从步骤s11到步骤s15的过程来确定坐标测量设备s的尺度误差。然后,通过进行图1所示的步骤s18的过程来计算球板p中所包括的基准球a1和基准球a2之间的间隔的校准值。
64.《根据本实施例的校准方法的效果》
65.如上所述,根据本实施例的校准方法包括以下的步骤:利用激光干涉仪16测量从激光干涉仪16到反射体15的第一距离,并且利用坐标测量设备s测量待测量体14的第一坐标;移动包括待测量体14和反射体15的待测量结构;在该移动之后利用激光干涉器16测量
从激光干涉仪16到反射体15的第二距离,并且在该移动之后利用坐标测量设备s测量待测量体14的第二坐标;基于所测量的第一距离和第二距离之间的差来确定坐标测量设备s的尺度误差;利用坐标测量设备s测量基准仪器的作为待测量物体的基准球之间的间隔;以及基于所测量的基准球之间的间隔以及坐标测量设备s的尺度误差来计算基准球之间的间隔的校准值。
66.通过以这种方式校准基准仪器,可以在考虑到坐标测量设备s的尺度误差的同时计算基准仪器中所包括的多个待测量物体之间的间隔的校准值,并且校准基准仪器的精度得以进一步提高。
67.基于这些典型实施例说明了本发明。本发明的技术范围不限于在上述实施例中说明的范围,并且在本发明的范围内可以进行各种改变和修改。例如,设备的全部或一部分可被配置为在功能上或物理上以任意单位分布和集成。此外,通过这些典型实施例的任意组合所生成的新典型实施例包括在本发明的典型实施例中。由该组合引起的新实施例的效果同时具有原始实施例的效果。
68.附图标记说明
69.10 面板面
70.11 探测器
71.12 导轨
72.13 滑块
73.14 待测量体
74.15 反射体
75.16 激光干涉仪
76.17 台座
77.18 待测量部分
78.19 反射部分
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1