基于深度成像的酒糟体积测量方法与流程
1.本发明涉及酒糟体积测量方法。
背景技术:
2.在浓香型白酒的酿造工艺流程中,当酒糟的发酵工艺完成后,经过配料的酒糟需向蒸馏工艺的酒糟转移进行上甑工艺过程。在此过程中,目前泸州老窖的部分生产车间采用大斗转小斗的全自动产线进行配料和上甑工艺。其中,在现有的工艺流程中,对小斗中的酒糟和配料进行重量测量,以确定每次上甑的酒糟和配料的总体水平。由于酒糟发酵情况造成其含水量及淀粉含量有所区别,相同重量的酒糟在体积上会有不同,这也会进一步影响配料的工艺流程,从而影响上甑的酒糟质量。
技术实现要素:
3.有鉴于此,确有必要提供一种基于深度成像的酒糟体积测量方法,该测量方法具有精度高、无接触(无需直接接触酒糟)且不受工作环境影响的优势。
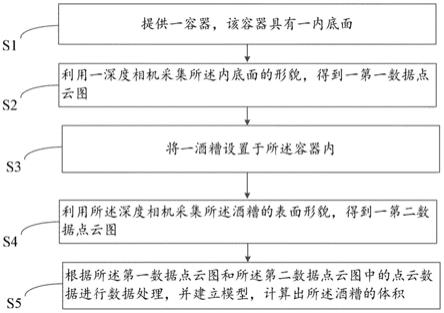
4.一种基于深度成像的酒糟体积测量方法,其包括以下步骤:
5.s1,提供一容器,该容器具有一内底面;
6.s2,利用一深度相机采集所述内底面的形貌,得到一第一数据点云图;
7.s3,将一酒糟设置于所述容器内,该酒糟形成一酒糟堆;
8.s4,利用所述深度相机采集所述酒糟的表面形貌,得到一第二数据点云图;以及
9.s5,根据所述第一数据点云图和所述第二数据点云图中的点云数据进行数据处理,并建立模型,计算出所述酒糟的体积。
10.与现有技术相比,本发明提供的基于深度成像的酒糟体积测量方法,是利用深度相机实时对酒糟转移及上甑过程中的酒糟及配料的体积进行检测采集,并与实时测量的材料重量数据相配合,给出酒糟及配料的密度数据,进而提高酒糟及上甑配料的标准化程度。所述基于深度成像的酒糟体积测量方法具有精度高、无接触(无需直接接触酒糟)且不受工作环境影响等优势,适合在酒糟转移及拌料的过程中使用。
附图说明
11.图1为本发明提供的基于深度成像的酒糟体积测量方法的流程图。
12.图2为本发明提供的移动斗和重量采集装置的结构示意图。
13.图3a至图3d为本发明提供的出窖糟不同角度的光学照片。
14.图4a和图4b分别为本发明提供的出窖糟正面形貌的光学照片及相应的第二数据点云图。
15.图5a和图5b分别为本发明提供的出窖糟另一光学照片及相应的第二数据点云图。
16.图6a和图6b分别为本发明提供的出窖糟另一光学照片及相应的第二数据点云图。
17.图7a和图7b为本发明提供的出窖糟正面形貌的点云计算图。
18.图8为本发明提供的深度相机的网格数据3d视图。
19.图9a和图9b分别为本发明提供的盛满酒糟的容器的俯视图和高度轮廓数据。
20.图10a和图10b分别为本发明提供的40秒内一个切片随时间采样的高度轮廓和随时间采样的平均高度。
21.图11a和图11b分别为5个独立完整切片高度轮廓和带有误差条的相应平均高度。
22.主要元件符号说明
23.移动斗
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
10
24.重量采集装置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
20
25.如下具体实施方式将结合上述附图进一步说明本发明。
具体实施方式
26.下面将结合附图及具体实施例对本发明提供的基于深度成像的酒糟体积测量方法作进一步的详细说明。
27.请参见图1,本发明提供一种基于深度成像的酒糟体积测量方法,其包括以下步骤:
28.s1,提供一容器,该容器具有一内底面;
29.s2,利用一深度相机采集所述内底面的形貌,得到一第一数据点云图;
30.s3,将一酒糟设置于所述容器内;
31.s4,利用所述深度相机采集所述酒糟的表面形貌,得到一第二数据点云图;以及
32.s5,根据所述第一数据点云图和所述第二数据点云图中的点云数据进行数据处理,并建立模型,计算出所述酒糟的体积。
33.步骤s1中,所述容器的种类和尺寸不限,比如,实验室所使用的盘子,生产线上所使用的斗等。
34.步骤s3中,本实施例中,利用一移动斗10对所述酒糟进行转移。如图2所示,本实施例中,所述移动斗10的上口尺寸为2100*2100mm2(平方毫米),下口尺寸为1800*1600mm2,高度为1100mm(毫米)。所述移动斗10的下方设置一重量采集装置20,该重量采集装置20的采集频率为20次/秒。所述移动斗10用于盛放酒糟,所述重量采集装置20用于结合体积测量结果计算酒槽的密度。在酒糟的转移过程中,转移进所述移动斗10的酒糟自然形成一个堆尖的圆锥形状,需求即为对此堆尖状酒糟进行体积变化测量。所述堆尖状酒糟也可称为酒糟堆。
35.步骤s4中,利用所述深度相机进行所述酒糟表面形貌的采集,得到所述酒糟表面形貌的第二数据点云图,以便后续进行数据处理和计算,用于得到酒糟的体积数据。
36.本实施例中,以出窖糟为实验样本进行深度信息采集并结合相应数据处理方法和体积计算算法,得到所述出窖糟的体积。所述出窖糟的形貌如图3所示。利用量筒测量,得知所述出窖糟的体积约为7750ml(毫升)。利用深度相机对所述出窖糟进行表面形貌的采集,图4a和图4b为所述出窖糟俯视或者正面形貌的光学照片及相应的第二数据点云图。
37.可见,通过深度相机的数据采集,可以得到所述酒糟堆表面的高分辨率形貌图,本实施中,所述高分辨率形貌图中,空间分辨率为640
×
480,单个像素点约为1.2*1.2mm2,深度信息的最小分辨率可达0.1mm。所述深度相机被设置为vga分辨率,以保证深度测量精度
和中等数据存储。本实施例中,所述深度相机的分辨率为vga(640
×
480)。表i为本实施例中深度相机的参数。
38.表i深度相机的参数
[0039][0040]
针对酒糟堆的不同角度,均可利用深度相机进行相应的表面形貌扫描。图5a和图5b为所述出窖糟另一光学照片及相应的第二数据点云图,图6a和图6b为所述出窖糟另一光学照片及相应的第二数据点云图。
[0041]
步骤s5中,根据所述第一数据点云图和所述第二数据点云图中的点云数据进行数据处理,并建立模型,计算出所述酒糟的体积。具体过程为:所述酒糟堆的表面模型定义为z
l
(x,y),其中,z
l
(x,y)中的x和y分别是所述第二数据点云图中点数据的横坐标和纵坐标。所述容器的内底面的表面模型定义为zc(x,y),其中,zc(x,y)中的x和y分别是所述第一数据点云图中点数据的横坐标和纵坐标。
[0042]
当所述深度相机的图像平面平行于容器的内底面时,所述酒糟堆的体积v
l
就是z
l
和zc之间的积分。也即,所述深度相机的图像平面平行于容器的内底面时,所述酒糟堆的体积v
l
用公式(1)可以得到。
[0043]vl
=∫∫
szl
(xy)-zc(x,y)dxdy.
ꢀꢀꢀꢀꢀꢀꢀ
(1)
[0044]
然而,实际生产中,所述深度相机的图像平面并非平行于容器的内底面,深度相机的图像平面与容器的内底面会形成一个夹角,该夹角定义为错位角θ。此时,所述酒糟堆的体积v
l
应由cosθ修正。因此,所述深度相机的图像平面与容器的内底面具有错位角θ时,所述酒糟堆的体积v
l
用公式(2)可以得到。
[0045]vl
=cosθ∫∫
szl
(x,y)-zc(x,y)dxdy.
ꢀꢀꢀꢀꢀꢀ
(2)
[0046]
本实施例中,所述出窖糟正面形貌的点云计算图,如图7a和图7b所示,其中,图7b是截掉了容器边框的数据示意图。利用深度相机获得的点云数据,进行网格化处理,获得窖糟的表面栅格数据,如图8所示。本实施例中,经过数据处理及积分运算,根据深度相机测得的点云数据计算得出,所述出窖糟的体积为7625ml,量筒测量得知所述出窖糟的体积约为7750ml。因此,本发明所提供的基于深度成像的酒糟体积测量方法,与所述量筒测量数据的相对误差为1.6%。另外,本发明计算了5组仿真体积数据,并将它们与量筒测量的实际体积进行了比较,结果如表ii所示。可见,本发明所提供的基于深度成像的酒糟体积测量方法,与所述量筒测量数据的相对误差均小于2%。也即,本发明所提供的基于深度成像的酒糟体积测量方法与实际的准确值的相对误差小于2%。
[0047]
表ii体积测量数据
[0048]
计算体积(m^3)0.7700.7520.7880.7400.813实际体积(m^3)0.7820.7650.7220.7320.935相对误差(%)1.61.721.11.2
[0049]
进一步,所述基于深度成像的酒糟体积测量方法进一步包括一步骤s6“计算容器底部的平均高度,从而计算平均高度标准”。具体的,酒糟堆表面在l(x,y)=0处切割一个切片,并生成一个稳定的统计阈值来确定容器是否已满,其定义如下:
[0050][0051]
其中,l是切片的长度。由于当容器装满时酒糟堆轮廓大致稳定,因此这种基于经验平均高度的标准对于确定容器的状态应该是稳定的。所述深度相机提供酒糟堆表面的实时点云数据,修改公式(3),得到公式(4):
[0052][0053]
其中,tc为判断所述容器是否已盛满酒糟的阈值,zc=(1/n),l(x,y)=0,zc(x,y)是容器底部的平均高度,n是所述第二数据点云图满足l(x,y)=0的点总数。因此,增加步骤s6“计算容器底面的平均高度,从而计算平均高度标准”,可以在没有完整测量和计算酒糟堆体积的情况下,应用实用且稳定的标准来判断容器是否已盛满酒糟。
[0054]
通过将该方法带到实际的白酒生产线来验证该方法的可访问性和稳定性。采集同一条生产线同一天的五批数据。每批数据都包含从空容器到满容器的酒糟堆表面测量值,所述满容器是指容器盛满酒糟。当天酒糟堆密度一致,深度相机的未对准角度可以忽略不计。根据这些数据,选择一个高度轮廓并计算平均高度标准。图9a和图9b显示了一个满容器的俯视图和高度轮廓。选择的轮廓平行于容器的边界,避免了容器边界对深度相机视野的影响。图9a为满容器表面数据的俯视图,图中的点线显示用于计算平均高度标准的高度轮廓。图10显示了高度轮廓如何随时间变化。所计算的5个批次的数据在容器已满时高度轮廓的平均高度,结果如图11a和图11b所示。图11a和图11b中的数据表明,所选剖面的切片平均高度在一天内高度稳定,平均高度的最大波动小于3%。为了确定一个实用的判断容器是否已满的平均高度标准,可以将阈值设置为tc=0.95m(米),并触发制酒过程中的下一个程序。
[0055]
因此,利用深度相机获得的点云数据,进行网格化处理,获得窖糟的表面栅格数据。基于栅格数据可以计算窖糟的体积,并获得窖槽的切片数据,通过计算切片高度均值获得窖糟体积判据。
[0056]
由此可知,根据深度相机的测量方法和相应的数据处理及建模计算过程,可以较为精确地测定所述酒糟的体积。也即,所述基于深度成像的酒糟体积测量方法可以精确地测定所述酒糟的体积。并且还可以判断容器是否已盛满酒糟。
[0057]
另外,所述基于深度成像的酒糟体积测量方法还可以对所述酒糟堆尖的堆积过程进行动态测量。本实施例中,对所述出窖糟堆尖的动态测量的测试频率为30次/秒。
[0058]
进一步,所述基于深度成像的酒糟体积测量方法也同样适用于在酿造白酒时所使用的配料的体积。
[0059]
所述基于深度成像的酒糟体积测量方法具有以下优点:第一、本发明提供的基于深度成像的酒糟体积测量方法具有精度高、无接触且不受工作环境影响等优势,适合在酒糟转移及拌料的过程中使用;第二、本发明利用深度相机实时对酒糟转移及上甑过程中的酒糟及配料的体积进行检测采集,并与实时测量的材料重量数据相配合,给出酒糟及配料的密度数据,进而提高酒糟及上甑配料的标准化程度;第三、提出了一种基于平均高度的标准,用于快速准确地判断容器是否已盛满酒糟,该方法因其简单的测量和安装而适用于复杂的工厂场景,例如应用于白酒生产线。
[0060]
另外,本领域技术人员还可在本发明精神内做其他变化,当然,这些依据本发明精神所做的变化,都应包含在本发明所要求保护的范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1