读出电路、电子设备和旋转电流电路及其控制方法与流程
1.本发明涉及电力电子技术领域,特别是涉及读出电路、电子设备和旋转电流电路及其控制方法。
背景技术:
2.目前,霍尔传感器的读出电路包括旋转电流电路和消除失调电路,通过旋转电流电路和消除失调电路的配合,可以提高最终读出的霍尔电压的信噪比。
3.但是,旋转电流电路中的开关在开启和关断的瞬间,会产生电荷注入和时钟馈通等非理想因素,而此非理想因素可能在其输出端引入几百毫伏甚至几伏的尖峰电压,从而使得旋转电流电路的输出电压中存在幅值较大的脉冲纹波。
4.因此,如何抑制旋转电流电路的输出电压中的脉冲纹波,是亟待解决的技术问题。
技术实现要素:
5.有鉴于此,本发明提供了一种读出电路、电子设备和旋转电流电路及其控制方法,以抑制旋转电流电路的输出电压中的脉冲纹波。
6.为实现上述目的,本发明实施例提供如下技术方案:
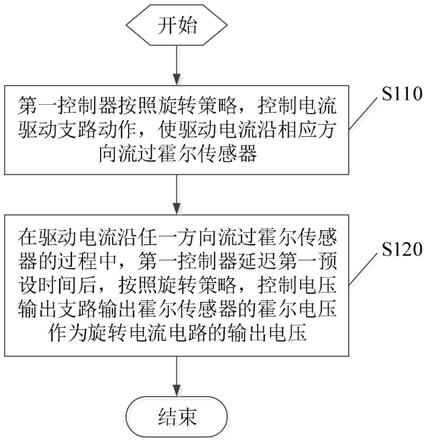
7.本技术第一方面提供一种旋转电流电路的控制方法,所述旋转电流电路,包括:第一控制器、电流驱动支路和电压输出支路,所述旋转电流电路的控制方法应用于所述第一控制器;所述旋转电流电路的控制方法,包括:
8.所述第一控制器按照旋转策略,控制所述电流驱动支路动作,使驱动电流沿相应方向流过霍尔传感器;
9.在所述驱动电流沿任一方向流过所述霍尔传感器的过程中,所述第一控制器延迟第一预设时间后,按照所述旋转策略,控制所述电压输出支路输出所述霍尔传感器的霍尔电压作为所述旋转电流电路的输出电压。
10.可选的,在控制所述电压输出支路输出所述霍尔传感器的霍尔电压作为所述旋转电流电路的输出电压的步骤之后,还包括:
11.在所述驱动电流沿任一方向流过所述霍尔传感器的过程中,所述第一控制器提前第二预设时间,控制所述电压输出支路停止输出;
12.所述第二预设时间等于所述第一预设时间。
13.可选的,所述旋转策略为两相旋转策略或者四相旋转策略;
14.所述两相旋转策略,具体为:
15.每个旋转周期包括两个阶段,在所述旋转周期中的两个阶段内,分别使所述驱动电流沿两个不同方向流过所述霍尔传感器,并分别使所述电压输出支路进行一次正向输出和一次反向输出;
16.所述四相旋转策略,包括:
17.每个旋转周期包括四个阶段,在所述旋转周期中的四个阶段内,分别使所述驱动
电流沿四个不同方向流过所述霍尔传感器,并分别使所述电压输出支路分别进行两次正向输出和两次反向输出。
18.可选的,所述驱动电流的不同流向,包括:由所述霍尔传感器的上节点至其下节点、由所述霍尔传感器的下节点至其上节点、由所述霍尔传感器的左节点至其右节点、由所述霍尔传感器的右节点至其左节点。
19.本技术第二方面提供一种旋转电流电路,包括:第一控制器、电流驱动支路和电压输出支路;其中:
20.所述电流驱动支路和所述电压输出支路均受控于所述第一控制器,所述第一控制器用于执行如本技术第一方面任一项所述的旋转电流电路的控制方法;
21.所述电流驱动支路的电源端接收驱动电流,所述电流驱动支路的四个驱动端分别与霍尔传感器的四个节点相连;
22.所述电压输出支路的输出端作为所述旋转电流电路的输出端,所述电压输出支路的四个输入端分别与所述霍尔传感器的四个节点相连。
23.可选的所述电流驱动支路和所述电压输出支路,均包括:四个并联连接的开关支路;所述开关支路,包括:两个串联连接的开关;其中:
24.串联的中点作为开关支路的中点,与所述霍尔传感器的相应节点相连。
25.本技术第三方面提供一种读出电路,包括:第二控制器、消除失调电路和如本技术第二方面任一项所述的旋转电流电路;其中:
26.所述旋转电流电路的输出端与所述消除失调电路的输入端相连,所述消除失调电路的输出端作为所述读出电路的输出端;
27.所述消除失调电路用于在所述第二控制器的控制下,对所述旋转电流电路的输出电压进行动态消除失调处理;
28.所述第二控制器与所述旋转电流电路中的第一控制器通信连接。
29.可选的,所述消除失调电路,包括:放大器、斩波器和四个电容;
30.所述放大器的输入端作为所述消除失调电路的输入端,所述放大器的输出端与所述斩波器的输入端相连,所述斩波器的输出端作为所述消除失调电路的输出端;
31.其中两个所述电容分别并联于所述放大器的输入端的两极与地之间,另外两个所述电容分别并联于所述斩波器的输出端的两极与地之间;
32.所述斩波器用于在所述第二控制器的控制下,将所述放大器输出端的电压按预设周期翻转。
33.可选的,当所述第一控制器采用的旋转策略为两相旋转策略时,所述预设周期与旋转周期相同;
34.当所述第二控制器采用的旋转策略为四相旋转策略时,所述预设周期等于所述旋转周期的一半。
35.本技术第四方面提供一种电子设备,应用有如本技术第三方面任一项所述的读出电路。
36.由上述技术方案可知,本发明提供了一种旋转电流电路的控制方法,应用于旋转电流电路的第一控制器。在该旋转电流电路的控制方法中,由于第一控制器在驱动电流沿任一方向流过霍尔传感器的过程中,第一控制器延迟第一预设时间后,按照旋转策略控制
电压输出支路输出霍尔传感器的霍尔电压作为旋转电流电路的输出电压,而电流驱动支路中的相应开关在开启和关断瞬时在旋转电流电路的输出端引入的尖峰电压大部分或全部出现在第一预设时间内,因此,本技术提供的旋转电流电路的控制方法,可以将大部分上述尖峰电压从旋转电流电路的输出电压中剔除,甚至全部,从而本技术提供的旋转电流电路的控制方法对旋转电流电路的输出电压中的脉冲纹波有抑制作用。
附图说明
37.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
38.图1为本技术实施例提供的旋转电流电路的结构示意图;
39.图2和图3分别为本技术实施例提供的旋转电流电路的控制方法的两种流程示意图;
40.图4为本技术实施例提供的旋转电流电路的结构示意图;
41.图5为第一时钟信号
‑
第十时钟信号的电平示意图;
42.图6为本技术实施例提供的读出电路的结构示意图。
具体实施方式
43.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
44.在本技术中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
45.为了抑制旋转电流电路的输出电压中的脉冲纹波,本技术实施例提供一种旋转电流电路的控制方法。
46.通常情况下,旋转电流电路的结构如图1所示,具体包括:第一控制器30、电流驱动支路10和电压输出支路20;其中,电流驱动支路10的电源端与电流源40的输出端相连,接收驱动电流idv,电流驱动支路10的四个驱动端分别与霍尔传感器01的四个节点相连;电流源40的输入端接收工作电压vdd;电压输出支路20的输出端作为旋转电流电路的输出端,电压输出支路20的四个输入端分别与霍尔传感器01的四个节点相连;并且,电流驱动支路10和电压输出支路20受控于第一控制器30。
47.本实施例提供的旋转电流电路的控制方法应用于旋转电流电路中的第一控制器,
其具体流程如图2所示,包括以下步骤:
48.s110、第一控制器按照旋转策略,控制电流驱动支路动作,使驱动电流沿相应方向流过霍尔传感器。
49.可选的,旋转策略可以为两相旋转策略,也可以为四相旋转策略,在实际应用中,包括但不限于上述两种实施方式,比如八相旋转策略,此处不做具体限定,均在本技术的保护范围内。
50.在本技术的一种具体实施方式中,第一控制器所采用的旋转策略为两相旋转策略,其具体为:每个旋转周期包括两个阶段,在每个旋转周期中的两个阶段内,分别使用驱动电流沿两个不同方向流过霍尔传感器,并分别使电压输出支路进行一次正向输出和一次反向输出。
51.在本技术的另一种具体实施方式中,第一控制器所采用的旋转策略为四相旋转策略,其具体为:每个旋转周期包括四个阶段,在每个旋转周期中的四个阶段内,分别使驱动电流沿四个不同方向流过霍尔传感器,并分别使电压输出支路进行两次正向输出和两次反向输出。
52.其中,驱动电流的不同流向,包括:由霍尔传感器的上节点至其下节点、由霍尔传感器的下节点至其上节点、由霍尔传感器的左节点至其右节点、由霍尔传感器的右节点至其左节点。
53.需要说明的是,在上述旋转策略中,驱动电流的不同流向可以从上述四种方向随机选择,此处不做具体限定,可视具体情况而定,均在本技术的保护范围内。
54.s120、在驱动电流沿任一方向流过霍尔传感器的过程中,第一控制器延迟第一预设时间后,按照旋转策略,控制电压输出支路输出霍尔传感器的霍尔电压作为旋转电流电路的输出电压。
55.其中,第一预设时间可以理解为死区时间,即在第一预设时间内电压输出支路不输出霍尔传感器的霍尔电压。
56.需要说明的是,第一预设时间是根据旋转电流电路中开关的实际情况进行设定,此处不做具体限定,均在本技术的保护范围内。
57.由上述可知,上述旋转电流电路的控制方法使得电压输出支路在第一预设时间内,不会对霍尔传感器的霍尔电压进行输出;再结合:电流驱动支路中的相应开关在开启和关断瞬时在旋转电流电路的输出端引入的尖峰电压大部分或全部出现在第一预设时间内,因此,上述旋转电流电路的控制方法,可以将大部分上述尖峰电压从旋转电流电路的输出电压中剔除,甚至全部,从而本技术提供的旋转电流电路的控制方法对旋转电流电路的输出电压中的脉冲纹波有抑制作用。
58.值的说明的是,在现有技术中,在驱动电流沿任一方向流过霍尔传感器的过程,电流驱动支路在整个过程中均对霍尔电压进行采样;与此相比,本技术仅在软件层次做出改变,即实现对旋转电流电路的输出电压中的脉冲纹波的抑制,因此,使得抑制旋转电流电路的输出电压中的脉冲纹波成本降低,并且易于实现。
59.另外,在本技术另一具体实施方式中,旋转电流电路的控制方法的具体流程如图3所示,在步骤s120之后,还包括以下步骤:
60.s210、在驱动电流沿任一方向流过霍尔传感器的过程中,第一控制器提前第二预
设时间,控制电压输出支路停止输出。
61.其中,第二预设时间同样可以理解为死区时间,即在第二预设时间内电压输出支路不输出霍尔传感器的霍尔电压,以保证进一步将电流驱动支路中的相应开关在开启和关断瞬时在旋转电流电路的输出端引入的尖峰电压,从旋转电流电路的输出电压中剔除,从而进一步抑制旋转电流电路中的脉冲纹波。
62.可选的,第二预设时间可以与第一预设时间相等,也可以与第一预设时间不相等,此处不做具体限定,可视具体情况而定,均在本技术的保护范围内。
63.需要说明的是,当第二预设时间与第一预设时间不相等时,第二预设时间是根据旋转电流电路中开关的实际情况进行设定,此处不做具体限定,均在本技术的保护范围内。
64.本技术另一实施例提供旋转电流电路的一种具体实施方式,其结构如图1所示,具体包括:第一控制器30、电流驱动支路10和电压输出支路20。
65.本实施例提供的旋转电流电路的结构已在上面进行详细说明,此处不再赘述;但是,本实施例提供的旋转电流电路中,第一控制器30用于执行上述实施例提供的旋转电流电路的控制方法,以抑制该旋转电流电路的输出电压中的脉冲纹波。
66.在本技术的另一具体实施方式中,参考图4(图中未示出第一控制器30),电流驱动支路10和电压输出支路20,均包括:四个并联连接的开关支路02;开关支路02,包括:两个串联连接的开关;其中,串联的中点作为开关支路02的中点,串联的两端分别作为开关支路02的两端。
67.可选的,电流驱动支路10和电压输出支路20中的各开关可以为nmos管,也可以为pmos管,此处不做具体限定,可视具体情况而定,均在本技术的保护范围内;另外,此处不对各开关是否选用同类型开关做具体限定,可视实际情况而定,均在本技术的保护范围内;比如,一部分开关选用nmos管,另一部分选用pmos管。
68.需要说明的是,由于电流驱动支路10上的各开关上流过的电流较大,为减少电流驱动支路10上的各开关(如图4中的第一开关k1
‑
第八开关k8)的导通电阻,所以将电流驱动支路10上的各开关的尺寸设计为较大的尺寸;另外,由于电压输出支路20上的各开关(如图4中的第九开关k9
‑
第十六开关k16)上流过的电流较小,所以电压输出支路20上的各开关的尺寸可以设计的相对较小,并且,因此电压输出支路20中的相应开关在开启和关断瞬时在旋转电流电路的输出端引入的尖峰电压所持续的时间很短,从而可以被后级放大器的有限带宽滤除大部分,进而可以结合动态失调消除技术在输出端获得极小纹波、极高信噪比的输出信号。
69.以图4(图中未示出第一控制器30)所示为例,电流驱动支路10具体包括:八个开关,分别为:第一开关k1
‑
第八开关k8;其具体连接方式为:
70.第一开关k1的第二端和第五开关k5的第一端相连,连接点与霍尔传感器01的上节点ha相连;第二开关k2的第二端和第六开关k6的第一端相连,连接点与霍尔传感器01的右节点hb相连;第三开关k3的第二端和第七开关k7的第一端相连,连接点与霍尔传感器01的下节点hc相连;第四开关k4的第二端和第八开关k8的第一端相连,连接点与霍尔传感器01的左节点hd相连;第一开关k1
‑
第四开关k4的第一端均相连,连接点与电流源40的输出端相连,接收驱动电流idv,电流源40的输入端接收工作电压vdd;第五开关k5
‑
第八开关k8的第二端均接地gnd;另外,第一开关k1和第七开关k7受控于第一控制器30输出的第一时钟信号
clk1,第二开关k2和第八开关k8受控于第一控制器30输出的第二时钟信号clk2,第三开关k3和第五开关k5受控于第一控制器30输出的第三时钟信号clk3,第四开关k4和第六开关k6受控于第一控制器30输出的第四时钟信号clk4。
71.电压输出支路20具体包括:八个开关,分别为:第九开关k9
‑
第十六开关k16;其具体连接方式为:
72.第九开关k9的第二端和第十三开关k13的第一端相连,连接点与霍尔传感器01的上节点ha相连;第十开关k10的第二端和第十四开关k14的第一端相连,连接点与霍尔传感器01的右节点hb相连;第十一开关k11的第二端和第十五开关k15的第一端相连,连接点与霍尔传感器01的下节点hc相连;第十二开关k12的第二端和第十六开关k16的第一端相连,连接点与霍尔传感器01的左节点hd相连;第九开关k9、第十开关k10、第十一开关k11以及第十二开关k12的第一端均相连,连接点作为电压输出支路20的输出端正极;第十三开关k13、第十四开关k14、第十五开关k15以及第十六开关k16的第二端均相连,连接点作为电压输出支路20的输出端负极;另外,第十二开关k12和第十四开关k14受控于第一控制器30输出的第五时钟信号clk5,第十一开关k11和第十三开关k13受控于第一控制器30输出的第六时钟信号clk6,第十开关k10和第十六开关k16受控于第一控制器30输出的第七时钟信号clk7,第九开关k9和第十五开关k15受控于第一控制器30输出的第八时钟信号clk8。
73.具体而言,第一时钟信号clk1
‑
第四时钟信号clk4分别由第一控制器中的第一时钟
‑
第四时钟产生,第五时钟信号clk5
‑
第八时钟信号clk8分别由第一控制器中的第五时钟
‑
第八时钟产生,在实际应用中,包括但不限于此实施方式,此处不做具体限定,可视具体情况而定,均在本技术的保护范围内。
74.以四相旋转策略为例,第一时钟信号clk1
‑
第八时钟信号clk8如图5所示,旋转电流电路的工作原理具体如下:
[0075]0°
相位阶段stage1:当第一时钟信号clk1由低电平变为高电平时,进入0
°
相位阶段stage1,第四开关k4和第六开关k6关断,第一开关k1和第七开关k7开启,驱动电流idv切换为:由霍尔传感器01的上节点ha流入,由其下节点hc流出;在第一时钟信号clk1变为高电平后的第一预设时间dt1内,由第四开关k4和第六开关k6关断瞬时以及第一开关k1和第七开关k7开启瞬时在旋转电流电路的输出端引入的尖峰电压完全消失或者接近消失。
[0076]
此后,第五时钟信号clk5由低电平变为高电平,第十二开关k12和第十四开关k14开启,正向输出霍尔电压,此时,旋转电流电路的输出电压vout=vout1=vh+vos,其中,vout1为旋转电流电路的输出电压vout在0
°
相位阶段stage1的电压值,vh为霍尔传感器01在驱动电流idv下产生的霍尔电压的电压值,vos为总失调电压值。
[0077]
其中,总失调电压,具体包括:霍尔传感器01自身和自身后级信号放大电路所引入的失调电压,1/f噪声,以及,由制备工艺缺陷、机械应力和环境温度等因素所引入的失调电压。
[0078]
在第一时钟信号clk1由高电平变为低电平前的第二预设时间dt2处,第五时钟信号clk5由高电平变为低电平,第十二开关k12和第十四开关k14关断,停止输出霍尔电压。
[0079]
90
°
相位阶段stage2:当第二时钟信号clk2由低电平变为高电平时,进入90
°
相位阶段stage2,第一开关k1和第七开关k7关断,第二开关k2和第八开关k8开启,驱动电流idv切换为:由霍尔传感器01的右节点hb流入,由其左节点hd流出;在第二时钟信号clk2变为高
电平后第一预设时间dt1内,由第一开关k1和第七开关k7关断瞬时以及第二开关k2和第八开关k8开启瞬时在旋转电流电路的输出端引入的尖峰电压完全消失或者接近消失。
[0080]
此后,第六时钟信号clk6由低电平变为高电平,第十一开关k11和第十三开关k13开启,反向输出霍尔电压,此时,旋转电流电路的输出电压vout=vout2=
‑
vh+vos,其中,vout2为旋转电流电路的输出电压vout在90
°
相位阶段stage2的电压值。
[0081]
在第二时钟信号clk2由高电平变为低电平前的第二预设时间dt2处,第六时钟信号clk6由高电平变为低电平,第十一开关k11和第十三开关k13关断,停止输出霍尔电压。
[0082]
180
°
相位阶段stage3:当第三时钟信号clk3由低电平变为高电平时,进入180
°
相位阶段stage3,此相位阶段中各开关的变化可参考上述两个相位阶段推导得到,此处不再一一赘述;此相位阶段中,旋转电流电路的输出电压vout=vout3=vh+vos,其中,vout3为旋转电流电路的输出电压vout在180
°
相位阶段stage3的电压值。
[0083]
270
°
相位阶段stage4:当第四时钟信号clk4由低电平变为高电平时,进入270
°
相位阶段stage4,此相位阶段中各开关的变化可参考上述两个相位阶段推导得到,此处不再一一赘述;此相位阶段中,旋转电流电路的输出电压vout=vout4=
‑
vh+vos,其中,vout4为旋转电流电路的输出电压vout在270
°
相位阶段stage4的电压值。
[0084]
需要说明的是,本实施例提供的旋转电流电路相比于现有技术中的旋转电流电路的区别在于,在各个相位阶段中,现有技术将电压输出支路20中的相应开关与电流驱动支路10中的相应开关同时开启,本实施例将电压输出支路20中的相应开关的开启延后以及将电压输出支路20中的相应开关的关断提前,因此本实施例提供的旋转电流电路通过软件层面的改变,即可抑制自身输出电压中的脉冲纹波,从而使得本实施例提供的旋转电流电路对自身输出电压中的脉冲纹波的抑制成本降低。
[0085]
上述仅为电流驱动支路10和电压输出支路20的一种实施方式,在实际应用中,包括但不限于上述实施方式,此处不做具体限定,可视具体情况而定,均在本技术的保护范围内。
[0086]
本技术另一实施例提供读出电路的一种具体实施方式,其具体结构如图6所示,包括:第二控制器(图中未示出)、消除失调电路04和上述实施例提供旋转电流电路03。
[0087]
在读出电路的此具体实施方式中,旋转电流电路03与霍尔传感器01之间的连接关系已在上述实施例中进行详细说明,此实施方式中不再赘述。
[0088]
旋转电流电路03的输出端与消除失调电路04的输入端相连,消除失调电路04的输出端作为读出电路的输出端;消除失调电路04受控于第二控制器,第二控制器与旋转电流电路03中的第一控制器30通信连接。
[0089]
可选的,可以是第二控制器与第一控制器集成为系统控制器,也可以是第二控制器和第一控制器分别独立设置,此处不做具体限定,可视具体情况而定,均在本技术的保护范围内。
[0090]
在本技术另一具体实施方式中,参考图6,消除失调电路04的具体结构包括:放大器05、斩波器06和四个电容;放大器05的输入端作为消除失调电路04的输入端,放大器05的输出端与斩波器06的输入端相连,斩波器06的输出端作为消除失调电路04的输出端相连,斩波器用于在第二控制器的控制下,将放大器05输出端的电压按预设周期翻转;其中两个电容分别并联于放大器05的输入端的两极与地gnd之间,另外两个电容分别并联于斩波器
06的输出端的两极与地gnd之间;斩波器06受控于第二控制器输出的第九时钟信号clk9和第十时钟信号clk10。
[0091]
可选的,当第一控制器采用的旋转策略为两相旋转策略时,预设周期与旋转周期相同;当第二控制器采用的旋转策略为四相旋转策略时,预设周期等于旋转周期的一半;此处不做具体限定,可视具体情况而定,均在本技术的保护范围内。
[0092]
需要说明的是,第九时钟信号clk9和第十时钟信号clk10分别由第二控制器中的第九时钟和第十时钟产生,在实际应用中,包括但不限于此实施方式,此处不做具体限定,可视具体情况而定,均在本技术的保护范围内。
[0093]
以图6所示为例,并联于放大器05的输入端的正极与地gnd之间的电容为第一电容c1,并联于放大器05的输入端的负极与地gnd之间的电容为第二电容c2,并联于斩波器06的输出端正极与地gnd之间的电容为第三电容c3,并联于斩波器06的输出端负极与地gnd之间的电容为第四电容c4。
[0094]
以采用四相旋转策略的旋转电流电路03为例,第九时钟信号clk9和第十时钟信号clk10如图5所示,消除失调电路04的工作原理具体如下:
[0095]
第一电容c1和第二电容c2对旋转电流电路03的输出电压vout进行采样并保持,放大器05对旋转电流电路03的输出电压vout进行放大。
[0096]
进入0
°
相位阶段stage1后,第九时钟信号clk9在第一预设时间dt1内处于高电平,第三电容c3和第四电容c4通过斩波器06正向采样放大后的旋转电流电路03的输出电压vout,此后直到第五时钟信号clk5变为高电平前,第三电容c3和第四电容c4一直对自身所采样到的电压进行保持,此时斩波器06输出端的差分输出电压v
′
out=v
′
out4=
‑
av
×
vout4=
‑
av
×
(
‑
vh+vos);其中,v
′
out4为斩波器06输出端的差分输出电压v
′
out在270
°
相位阶段stage4的电压值,
‑
av为放大器05的放大倍数。
[0097]
进入90
°
相位阶段stage2后,第十时钟信号clk10在第一预设时间dt1内处于高电平,第三电容c3和第四电容c4通过斩波器06反向采样放大后的旋转电流电路03的输出电压vout,此后直到第六时钟信号clk6变为高电平前,第三电容c3和第四电容c4一直对自身所采样的电压进行保持,此时斩波器06输出端的差分输出电压v
′
out=v
′
out1=av
×
vout1=av
×
(vh+vos);其中,v
′
out1为斩波器06输出端的差分输出电压v
′
out在0
°
相位阶段stage1的电压值。
[0098]
此时,斩波器06输出端的两次差分输出电压v
′
out在第三电容c3和第四电容c4上得到平均,此时最终斩波器06输出端的差分输出电压v
′
out=(v
′
out4+v
′
out1)/2=av
×
vh。
[0099]
进入180
°
相位阶段stage3后,第九时钟信号clk9的变化与进入0
°
相位阶段stage1后相同,此处不再赘述;此时,斩波器06输出端的差分输出电压v
′
out=v
′
out2=
‑
av
×
vout2=
‑
av
×
(
‑
vh+vos);其中,v
′
out2为斩波器06输出端的差分输出电压v
′
out在90
°
相位阶段stage2的电压值。
[0100]
进入270
°
相位阶段stage4后,第十时钟信号clk10的变化与进入90
°
相位阶段stage2后相同,此处不再赘述;此时,斩波器06输出端的差分输出电压v
′
out=v
′
out3=av
×
vout3=av
×
(vh+vos);其中,v
′
out3为斩波器06输出端的差分输出电压v
′
out在180
°
相位阶段stage3的电压值。
[0101]
此时,斩波器06输出端的两次差分输出电压v
′
out在第三电容c3和第四电容c4上
得到平均,此时最终斩波器06输出端的差分输出电压v
′
out=(v
′
out2+v
′
out3)/2=av
×
vh。
[0102]
需要说明的是,在一个旋转周期内,经过上述两次平均后,本实施例提供的读出电路使得失调电压对自身输出的电压的影响被消除掉大部分,并且还使得自身最终输出的信号的信噪比得到提高。
[0103]
上述仅为消除失调电路04的一种实施方式,在实际应用中,包括但不限于上述实施方式,此处不做具体限定,可视具体情况而定,均在本技术的保护范围内。
[0104]
本实施例还提供一种电子设备,在电子设备中,应用有如上述实施例提供的读出电路。
[0105]
对所公开的实施例的上述说明,本说明书中各实施例中记载的特征可以相互替换或者组合,使本领域专业技术人员能够实现或使用本技术。以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制。虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明。任何熟悉本领域的技术人员,在不脱离本发明技术方案范围情况下,都可利用上述揭示的方法和技术内容对本发明技术方案做出许多可能的变动和修饰,或修改为等同变化的等效实施例。因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所做的任何简单修改、等同变化及修饰,均仍属于本发明技术方案保护的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1