一种针对水际铁磁性目标集群的远距离磁探方法与流程
1.本发明涉及海洋技术领域,尤其是一种针对水际铁磁性目标集群的远距离磁探方法。
背景技术:
2.水际铁磁性目标集群是指一类固定于浅水区域内的、按照一定规律设置的人工障碍物,请参考图1,其作用是阻止来自水面的船只靠岸,从而达到对于特殊区域的防护目的。
3.船只探测水际铁磁性目标集群的存在,可以有助于船只提前规划靠岸路线以避开障碍。目前,船只中常用的避障传感器是各类声纳传感器和光学成像传感器,在靠近岸边的浅水区域中,声纳传感器容易受到混响的影响,探测效率下降;光学成像传感器在浑浊的水域中也难以发挥作用,从而导致目前对于水际铁磁性目标集群的探测准确度较低。
技术实现要素:
4.本发明人针对上述问题及技术需求,提出了一种针对水际铁磁性目标集群的远距离磁探方法,本发明的技术方案如下:
5.一种针对水际铁磁性目标集群的远距离磁探方法,应用于安装有磁通门传感器的船体上,且磁通门传感器的传感器坐标系的三轴与船体的船体坐标系的三轴平行,该方法包括:
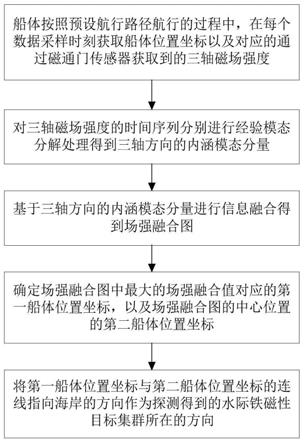
6.在船体按照预设航行路径航行的过程中,在每个数据采样时刻获取船体位置坐标以及对应的通过磁通门传感器获取到的三轴磁场强度;
7.对三轴磁场强度的时间序列分别进行经验模态分解处理得到三轴方向的内涵模态分量,每个轴方向的内涵模态分量包括若干个不同船体位置坐标处的磁场强度分量;
8.基于三轴方向的内涵模态分量进行信息融合得到场强融合图,场强融合图表示不同船体位置坐标对应的场强融合值,场强融合值是基于三轴方向的内涵模态分量进行信息融合得到的;
9.确定场强融合图中最大的场强融合值对应的第一船体位置坐标,以及场强融合图的中心位置的第二船体位置坐标,将第一船体位置坐标与第二船体位置坐标的连线指向海岸的方向作为探测得到的水际铁磁性目标集群所在的方向。
10.本发明的有益技术效果是:
11.本技术公开了一种针对水际铁磁性目标集群的远距离磁探方法,该方法利用磁通门传感器感应到的磁场强度,基于信号模态分解和图像融合方法可以实现对水际铁磁性目标集群的探测,探测效率和准确度都较高,可以克服现有的各类声纳传感器和光学成像传感器的缺陷。
12.该方法还以磁通门传感器在开阔水域中测量的数据为基础,对测量值进行补偿,以降低地磁场造成的扰动效应,将水际铁磁性目标集群的磁信号从测量噪声中分离出来,进一步提高探测精度。
附图说明
13.图1是水际铁磁性目标集群的结构示意图。
14.图2是执行本技术提供的方法的船体及其安装的磁通门传感器的结构示意图。
15.图3是本技术的远距离磁探方法的方法流程图。
16.图4是船体的预设航行路径的示意图。
17.图5是本技术的另一个实施例中的远距离磁探方法的方法流程图。
具体实施方式
18.下面结合附图对本发明的具体实施方式做进一步说明。
19.本技术公开了一种针对水际铁磁性目标集群的远距离磁探方法,该方法应用于安装有磁通门传感器2的船体1上,且磁通门传感器2的传感器坐标系o
m
x
m
y
m
z
m
的三轴与船体1的船体坐标系o
b
x
b
y
b
z
b
的三轴平行。如图2所示,利用固定无磁支架将磁通门传感器2安装于船体1上,o
m
x
m
//o
b
x
b
且记为x轴方向,o
m
y
m
//o
b
y
b
且记为y轴方向,o
m
z
m
//o
b
z
b
且记为z轴方向,x轴方向和y轴方向平行于水平面,z轴垂直于水平面,比如图2中,x轴沿着水平面指向船航行方向,y轴沿着水平面平行于x轴。
20.该方法包括如下步骤,请参考图3所示的流程图:
21.步骤1、在船体按照预设航行路径航行的过程中,在每个数据采样时刻获取船体位置坐标以及对应的通过磁通门传感器获取到的三轴磁场强度。一般可以按照固定时间间隔进行采样,总的采样次数可以自定义配置。
22.可选的,在一个实施例中,船体的预设航行路径包括若干条沿着海岸线且向着靠近海岸线的方向形成折返路径的航线,沿着海岸线是指大致平行于海岸线的方向,并不要求严格平行。相邻两条沿着海岸线的航线之间间隔预定距离d,比如较为典型的间隔5m。最后一条最靠近海岸线的航线与海岸线之间的距离d达到预定距离阈值以保证航行安全,比如较为典型的,最后一条航线与海岸线之间的距离d约为30m。如图4虚线表示预设航行路径,箭头方向表示航行方向,纵向的虚线表示平行于海岸线的航线,相邻两条航线之间的横向虚线表示航线之间的连续路径,从而形成折返路径。
23.步骤2、对三轴磁场强度的时间序列分别进行经验模态分解处理得到三轴方向的内涵模态分量,每个轴方向的内涵模态分量包括若干个不同船体位置坐标处的磁场强度分量。
24.基于n个数据采样时刻采样到的所有三轴磁场强度可以构建得到x、y、z三个方向的三轴磁场强度的时间序列,表示为其中x
n
(k)、y
n
(k)、z
n
(k)分别表示第k个数据采样时刻采样到的x、y、z三个方向的磁场强度,且第k个数据采样时刻对应的船体位置坐标也会记录,但未在上述时间序列中表示出来。
25.对三轴磁场强度的时间序列分别进行经验模态分解处理,包括对于每个轴的磁场强度的时间序列:
26.(1)将磁场强度的时间序列作为原始信号。
27.(2)根据原始信号的上下极值点得到上包络线和下包络线,将上包络线和下包络线的均值作为均值包络线。
28.(3)由原始信号减去均值包络线得到中间信号。
29.(4)若中间信号满足预定约束条件,则将中间信号作为内涵模态分量。否则将中间信号作为新的原始信号,并再次执行根据原始信号的上下极值点得到上包络线和下包络线的步骤,也即重新执行(2)~(4)。
30.其中,当中间信号的极值点的个数与过零点的个数的差值在预设范围内,且,在任意时刻由局部极大值点形成的上包络线和由局部极小值点形成的下包络线的平均值为零时,确定中间信号满足预定约束条件。
31.由此可以得到x、y、z三个方向的内涵模态分量,分别记为:
[0032][0033]
步骤3、基于三轴方向的内涵模态分量进行信息融合得到场强融合图,场强融合图表示不同船体位置坐标对应的场强融合值,场强融合值是基于三轴方向的内涵模态分量进行信息融合得到的。具体的:
[0034]
(1)求取x轴的内涵模态分量中各个磁场强度分量在纬度方向的第一梯度。实际可以由x轴的内涵模态分量x
mnimf
中n个船体位置坐标对应的磁场强度分量x
nimf
作图得到xpic,xpic以船体位置坐标中的纬度为x坐标、经度为y坐标、对应的磁场强度分量x
nimf
为z坐标,求取xpic的x坐标方向的梯度可以得到x
mnimf
中各个磁场强度分量x
nimf
在纬度方向的第一梯度。
[0035]
(2)求取y轴的内涵模态分量中各个磁场强度分量在经度方向的第二梯度。实际可以由y轴的内涵模态分量y
mnimf
中n个船体位置坐标对应的磁场强度分量y
nimf
作图得到ypic,ypic以船体位置坐标中的纬度为x坐标、经度为y坐标、对应的磁场强度分量y
nimf
为z坐标,求取ypic的y坐标方向的梯度可以得到y
mnimf
中各个磁场强度分量y
nimf
在经度方向的第二梯度。
[0036]
(3)对第一梯度和第二梯度进行加权处理得到加权梯度,一般按照相同的权重进行加权。
[0037]
(4)利用加权梯度得到对x轴的内涵模态分量和y轴的内涵模态分量融合后的各个船体位置坐标处的加权分量。
[0038]
(5)将z轴方向的内涵模态分量z
mnimf
中各个船体位置坐标处的磁场强度分量z
nimf
与对应船体位置坐标处的加权分量相乘,得到船体位置坐标处的场强融合值,构建得到场强融合图。
[0039]
步骤4、确定场强融合图中最大的场强融合值对应的第一船体位置坐标,以及场强融合图的中心位置的第二船体位置坐标,将第一船体位置坐标与第二船体位置坐标的连线指向海岸的方向作为探测得到的水际铁磁性目标集群所在的方向,从而完成探测。
[0040]
由于地磁场的强度远大于水际铁磁性目标集群产生的感应磁场的强度,且船载磁性传感器会随着船体运动而产生指向误差,导致水际铁磁性目标集群的磁特征信号会淹没
在测量噪声之中,使得探测结果不准确。因此在一个实施例中,该方法还包括去噪处理步骤,请参考图5:
[0041]
该方法在应用之前,控制船体按照预定航速在以船体为中心、预定半径的无铁磁性物质的区域内航行,并通过磁通门传感器获取对应的磁场强度得到当前航速对应的背景磁场强度,改变预定航速得到不同航速对应的背景磁场强度,得到背景磁场干扰数据。预定半径比如可以取1km。
[0042]
由于地磁场的干扰,磁通门传感器2在船体航行过程中获取到的磁场强度实际包括水际铁磁性目标集群产生的目标磁场强度以及背景磁场强度,假设通过磁通门传感器1感应到的若干个三轴磁场强度得到三轴方向的原始序列记为这其中的磁场强度是包含背景磁场强度的,若直接将其应用于步骤2中进行经验模态分解处理则误差较大,因此该实施例中首先利用背景磁场干扰数据对三轴方向的原始序列x
m
、y
m
、z
m
进行补偿,得到三轴磁场强度的时间序列x
mn
、y
mn
、z
mn
再应用于步骤2中。补偿方法包括:
[0043]
首先根据背景磁场干扰数据确定各个数据采样时刻的航速对应的背景磁场强度。具体的,得到的背景磁场干扰数据包括测试时使用的若干个航速对应的背景磁场强度,因此对背景磁场干扰数据进行线性插值,可以确定相应数据采样时刻的航速对应的背景磁场强度。
[0044]
利用各个数据采样时刻的背景磁场强度对每个轴方向的原始序列x
m
、y
m
和z
m
分别进行补偿得到对应的三轴磁场强度的时间序列x
mn
、y
mn
和z
mn
,具体的,补偿后得到的x
mn
、y
mn
和z
mn
中的第k个数据表示为
[0045][0046][0047]
表示从k个不同元素中取出p个元素的组合数且有x
mm
(k)、y
mm
(k)、z
mm
(k)分别表示在第k个数据采样时刻确定的背景磁场强度。
[0048]
以上所述的仅是本技术的优选实施方式,本发明不限于以上实施例。可以理解,本领域技术人员在不脱离本发明的精神和构思的前提下直接导出或联想到的其他改进和变化,均应认为包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1